12
Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Целью изобретения является расши- рение технологических возможностей за счет обеспечения поворота звеньев руки манипулятора относит ельно оси каждого шарнира соединения в одном направлении или альтернативно.
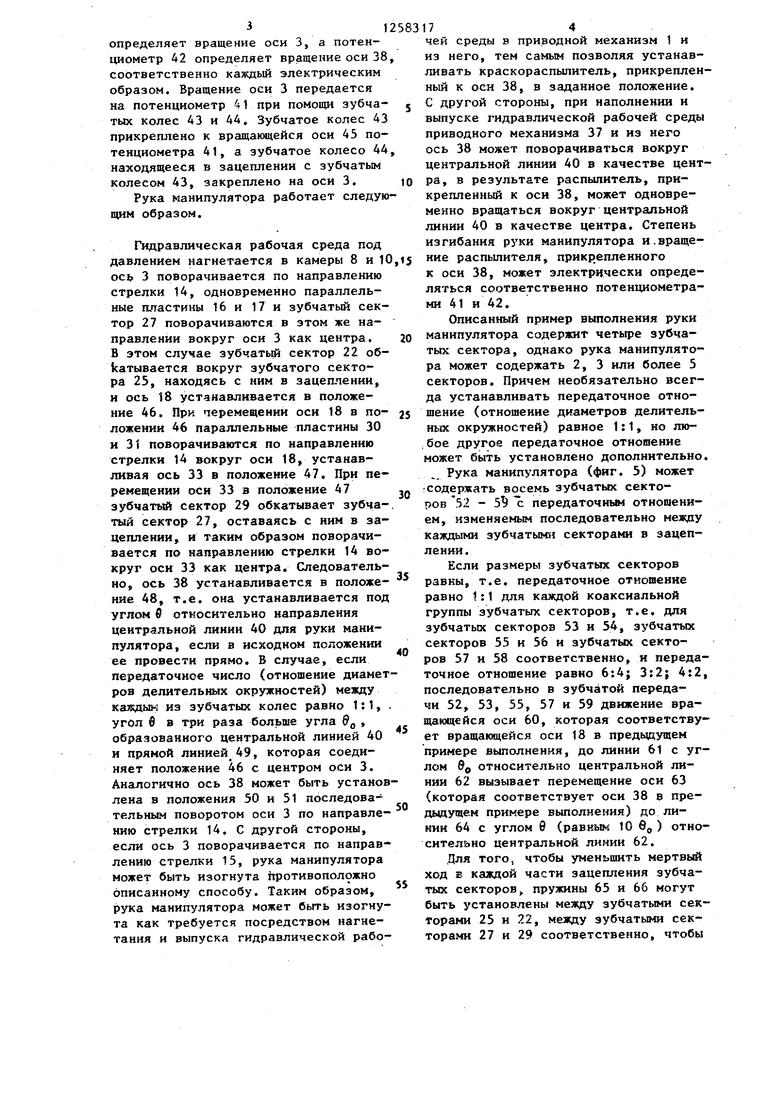
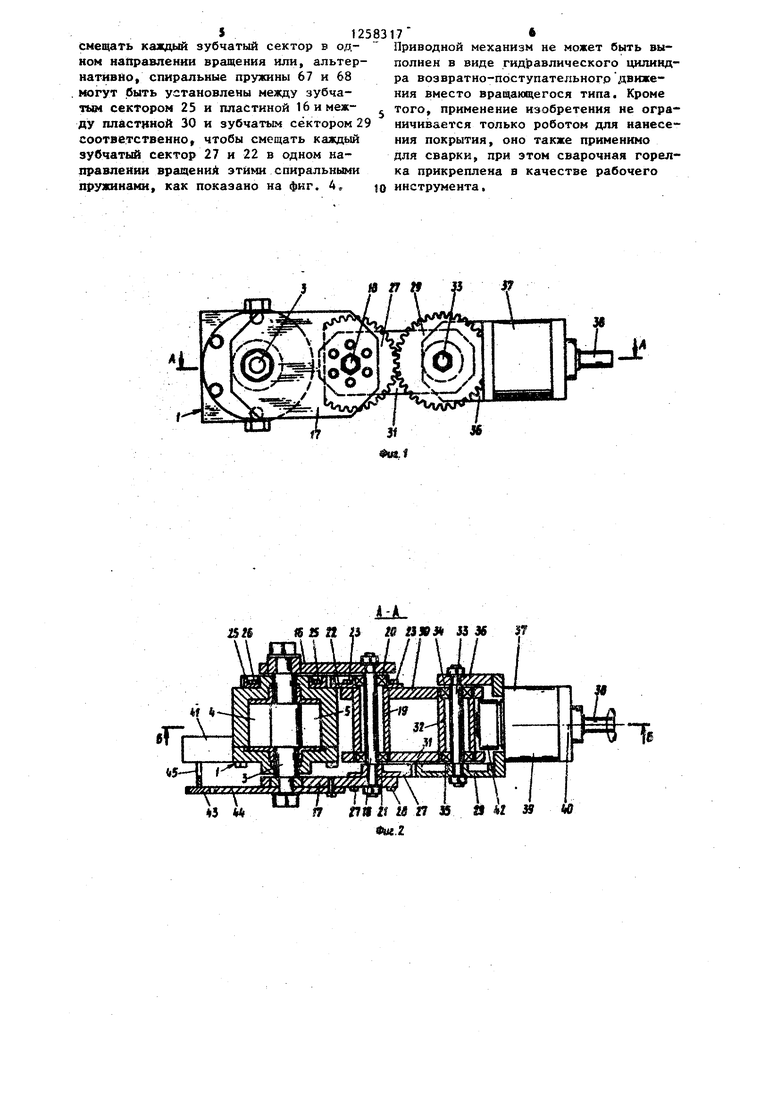
На фиг. 1 изображена рука манцпу- лятора, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вариант выполнения руки манипулятора, вид сбоку; на фиг. 5 - вариант выполнения руки манипулятора, вид сбоку.
Рука манипулятора содераит основание (не показано), на котором шар- , нирно установлены звенья кинe saти- связанные между собой посредством зубчатых передач. Опорное звено является приводным мехаиизмом (двигателем) 1, выполненжл в виде неполноповоротного гидроцилиндра, корпус 2 которого прикреплен к основанию или несгибаемой руке (не показана), а вращакщаяся ось 3, являкщая- ся ротором .кеполноповоротного гидро- 1щлиндра, преходящая через корпус 2, имеет лопатки 4 и 5, в качестве разделительных элементов,прикрепленных к ней. Лопатки 4 и 5 вместе с другими лопатками 6 и 7 в качестве разделительных элементов делят пространство в корпусе 2 на четыре камеры 8 11. Лопатки 6 и 7 прикреплены к корпусу 2 при помощи болтов 12 и 13. Если гидравлическая рабочая среда под давлением нагнетается в камеры 8 и 10 и выпускается из камер 9 и 10, лопатки 4 и 5 и ось 3 поворачиваются по направлению стрелки 14. Если гидравлическая рабочая среда под давлением нагнетается в камеры 9 и 11 и выпускается из камер 8 и 10, лопатки 4 н 5 и ось 3 поворачиваются по направлению стрелки 15. Первое не- чатное звено выполнено в двух параллельных пластин 16 и t, закрепленных с одной стороны на концах оси 3 так, чтобы корпус 2 размеЕдался между ними и не соприкасался с ними, а с другой стороны прикрегшены к оси 18. Ось 18 проходит через втулку 1°, соединенную при помощи подшипников 20 и 21 с осью 18 так, чтобы они могли вра1цаться совместно. На од
5
0
5
0
5
0
5
5
172
ной стороне втулки 19 закреплен зубчатой сектор 22 зубчатой передачи при ПОМО1ЦИ винтов 23. Подшипник 20 расположен между внутренней кольцевой поверхностью зубчатого сектора 22 и внешней кольцевой поверхностью оси 18. Зубчатый сектор 22 выполнен в виде дискового элемента, имекицего срезанную часть 24. Неподвижный зуб- чатьй сектор 25 прикреплен к одной из сторон корпуса 2 при помощи винтов 26 и находится в зацеплении с зубчатым сектором 22. Угловое перемещение оси 3 вызывает поворот оси 18 посредством четного звена, имеющего параллельные пластины 16 и 17, и, как результат, зубчатый сектор 22, находящийся в зацеплении с зубчатым сектором 25, поворачивается вокруг зубчатого сектора 25. Втулка 19 также вращается в результате этого движения. Зубчатый сектор 27 закреплен на одной стороне пластины 17 при помощи винтов 28, и центральная ось зубчатого сектора 27 сооснас осью 18. Зубчатый сектор 27 находится в зацеплении с зубчать сектором 29. Четное звено выполнено в виде пары параллельных пластин 30 и 31, прикреплен- jffiK с одной стороны к втулке 19, а с другой стороны прикрег енных к втулке 32. Вращающаяся ось 33 проходит через втулку 32. При этом втулка 32 и .ось 33 соединены посредством подшипников 34 и 35 так, чтобы они могли вращаться совместно друг с другом. Лодшинники 34 и 35 расположены между внутренней кольцевой поверхностью втулки 32 и внешней кольцевой аоверх- ностью оси 33.
Зубчатый сектор 29 прикреплен к одному концу оси 33, а пластина 36 прикреплена к другому концу оси 33. Когда зубчатый сектор 29 совершает планетарное движение вокруг зубчатого сектора 27, зубчатый сектор 29 н ось 33 совершают идентичное вращение и пластина 36 поворачивается идентичным образом. Приводной механизм 37, подобный приводному механизму 1, установлен на пластине 36. Вращающаяся ось 38, подобно оси 3, выступает из,одной -торцовой поверхности корпуса 39 приводного механизма 37 и вращается вокруг центральной линии 40 в качестве центра приведения в движение приаодного механизма 37. Рабочий инструмент (краскораспылитель) прикрепляется к оси 38. ПотекциомОтр 41
определяет вращение оси 3, а потенциометр 42 определяет вращение оси 38 соответственно каждый электрическим образом. Вращение оси 3 передается на потенциометр 41 при помощи зубча- тых колес 43 и 44, Зубчатое колес 43 прикреплено к вращающейся оси 45 потенциометра 41, а зубчатое колесо 44 находящееся в зацеплении с зубчатым колесом 43, закреплено на оси 3.
Рука манипулятора работает следую образом.
Гидравлическая рабочая среда под давлением нагнетается в камеры 8 и 1 ось 3 поворачивается по направлению стрелки 14, одновременно параллельные пластины 16 и 17 и зубчатый сектор 27 поворачиваются в этом же на- правлении вокруг оси 3 как центра. В этом случае зубчатьй сектор 22 об- kaтывaeтcя вокруг зубчатого сектора 25, находясь с ним в зацеплении, и ось 18 устанавливается в положение 46, При перемещении оси 18 в по- ложении 46 Параллельные пластины 30 и 31 поворачиваются по направлению стрелки 14 вокруг оси 18, устанавливая ось 33 в положение 47, При перемещении оси 33 в положение 47 зубчат сектор 29 обкатывает зубчатый сектор 27, оставаясь с ним в зацеплении, и таким образом поворачивается по направлению стрелки 14 вокруг оси 33 как центра. Следовательно, ось 38 устанавливается в положение 48, т.6, она устанавливается под углом б относительно направления центральной линии 40 для руки манипулятора, если в исходном положении ее провести прямо. В случае, если передаточное число (отношение диаметров делительных окружностей) между каждый из зубчатых колес равно 1:1, угол 6 в три раза больше угла 9, , образованного центральной линией 40 и прямой линией 49, которая соединяет положение 46 с центром оси 3. Аналогично ось 38 может быть установлена в положения 50 и 51 последовательным поворотом оси 3 по направлению стрелки 14, С другой стороны, если ось 3 поворачивается по направлению стрелки 15, рука манипулятора может быть изогнута противоположно описанному способу. Таким образом, рука манипулятора может быть изогнута как требуется посредством нагнетания и выпуска гидравлической рабо
j ю
,15 20 25 40
0
5
чей среды в приводной механизм 1 и из него, тем самым позволяя устанавливать краскораспылитель, прикрепленный к оси 38, в заданное положение. С другой стороны, при наполнении и выпуске гидравлической рабочей среды приводного механизма 37 и из него ось 38 может поворачиваться вокруг центральной линии 40 в качестве центра, в результате распылитель, прикрепленный к оси 38, может одновременно вращаться вокруг центральной линии 40 в качестве центра. Степень изгибания руки манипулятора и.вращение распылителя, прикрепленного к оси 38, может электрически определяться соответственно потенциометрами 41 и 42,
Описанный пример выполнения руки манипулятора содержит четыре зубчатых сектора, однако рука манипулятора может содержать 2, 3 или более 5 секторов. Причем необязательно всегда устанавливать передаточное отношение (отношение диаметров делитель- HbiDc окружностей) равное 1:1, но лю- ,бое другое передаточное отношение может быть установлено дополнительно.
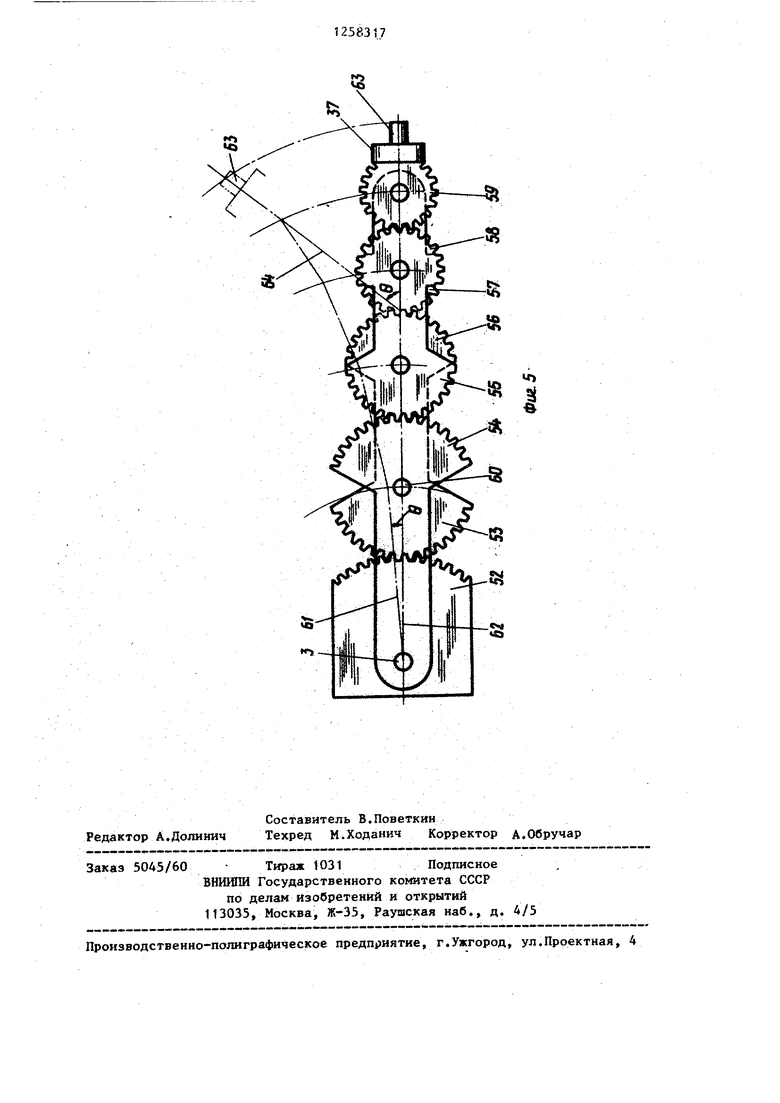
Рука манипулятора (фиг, 5) может :содержать восемь зубчатых секторов 52 - 5 1: передаточным отношением, изменяемым последовательно между каждыми зубчатыми секторами в зацеплении.
Если размеры зубчатых секторов равны, т.е, передаточное отношение равно 1:1 для каждой коаксиальной группы зубчатых секторов, т.е, для зубчатых секторов 53 и 54, зубчатых секторов 55 и 56 и зубчатых секторов 57 и 58 соответственно, и передаточное отношение равно 6:4; 3:2; 4:2, последовательно в зубчатой передачи 52, 53, 55, 57 и 59 движение вращающейся оси 60, которая соответствует вращающейся оси 18 в предьщущем примере выполнения, до линии 61 с углом Sff относительно центральной линии 62 вызывает перемещение оси 63 (которая соответствует оси 38 в пре- даадущем примере выполнения) до линии 64 с углом 9 (равным 10 в) относительно центральной линии 62.
,Цля того, чтобы уменьшить мертвый ход Е каждой части зацепления зубчатых секторов пружины 65 и 66 могут быть установлены между зубчатыми секторами 25 и 22, между зубчатыми секторами 27 и 29 соответственно, чтобы
$12583
смещать каждый зубчатый сектор в одном направлении вращения или, альтернативно, спиральные пружины 67 и 68 могут 1быть установлены между зубча- тьи сектором 25 и пластиной 16 и меж- ду пластиной 30 и зубчатым сектором 29 соответственно чтобы смещать каждый зубчатый сектор 27 и 22 в одном направлении вращений этими спиральными пружинами, как показано на фиг. 4,, Ю
17
Приводной механизм не может быть выполнен в виде гидравлического цилиндра возвратно-поступательного движения вместо вращающегося типа. Кроме того, применение изобретения не ограничивается только роботом для нанесения покрытия, оно также применимо ДЛИ сварки, при этом сварочная горелка прикреплена в качестве рабочего инструмента,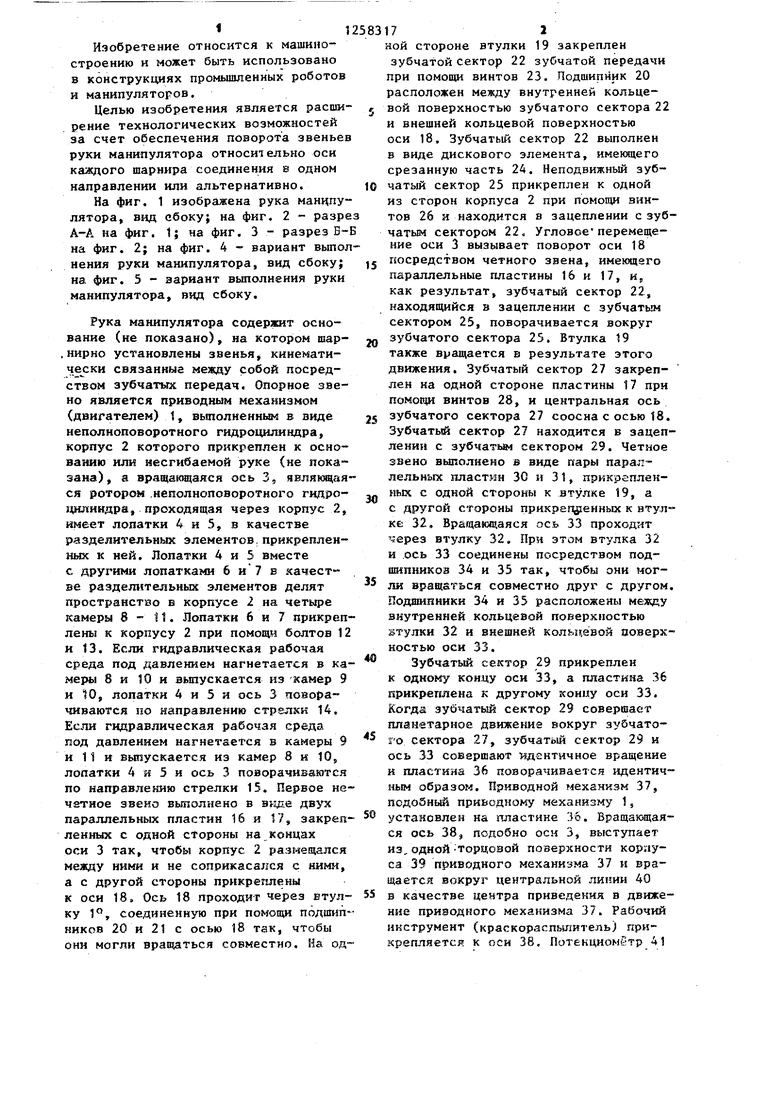
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботом | 1982 |
|
SU1261555A3 |
| Гибкое плечо | 1982 |
|
SU1168089A3 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| СИСТЕМА ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЯ | 2014 |
|
RU2590040C2 |
| Манипулятор | 1979 |
|
SU831615A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ХОЛОДИЛЬНЫЙ АППАРАТ С РЕГУЛИРУЕМОЙ ПО ВЫСОТЕ ПОЛКОЙ ДЛЯ ОХЛАЖДАЕМЫХ ПРОДУКТОВ | 2008 |
|
RU2488051C2 |
| ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ ЛЮДЕЙ | 1998 |
|
RU2191153C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| УСТРОЙСТВО ДИНАМИЧЕСКОГО СОЕДИНЕНИЯ ДЛЯ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МЕЖДУ ДВУМЯ ВАЛАМИ | 1990 |
|
RU2054592C1 |
а гг
К№
bL. 3 гв ая к 36 я
7/7
6-g,
J7
25 49 «5
/5
/
Фиг. 4
Редактор А.Долинич
Составитель В.Поветкин
Техред М.Ходанич Корректор А.Обручар
Заказ 5045/60 Тираж 1031 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Манипулятор | 1975 |
|
SU524685A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
