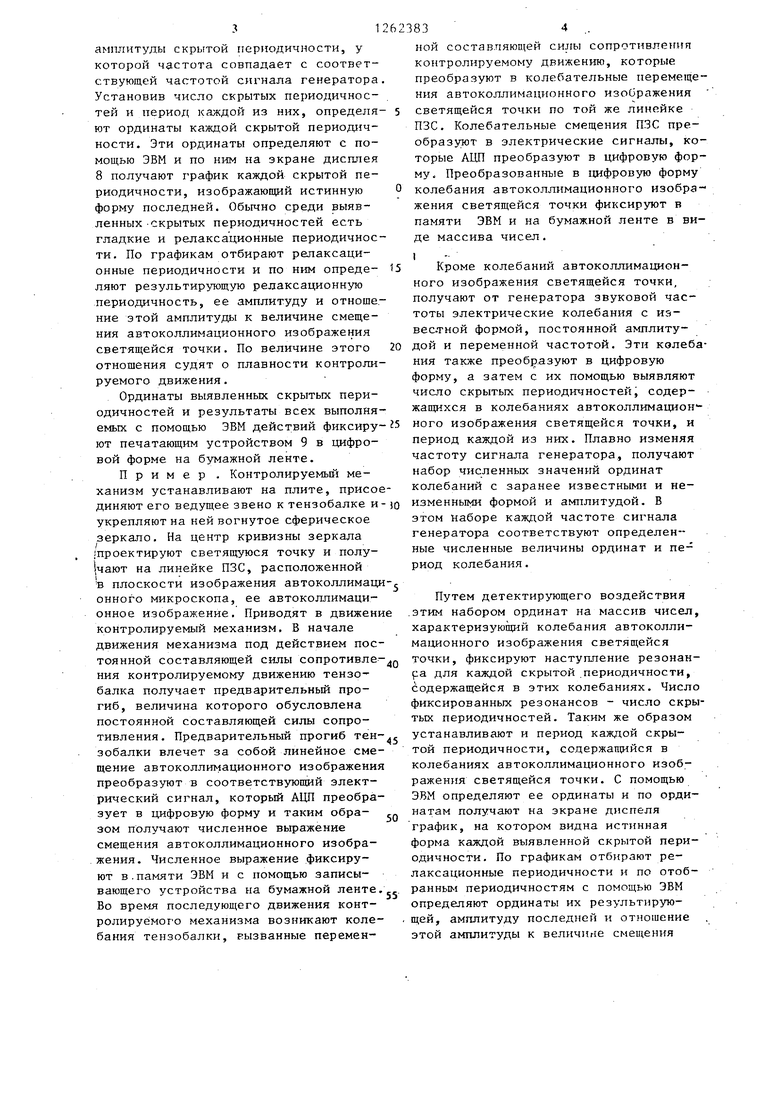
. 1 Изобретение относится к. приборостроению, преимущественно к оптическому, электронно-оптическому, и може быть использовано для выявления наличия неплавности движения и причин ее вызывающих в различных .кинематических парах. Цель изобретения - повышение достоверности контроля. : На фиг. 1 изображена структурная схема контрольного комплекса, с помощью которого реализуется способ; на фиг. 2 - схема оптико-механическо го устройства, с помощью которого преобразуют деформацию и колебания Упругого элемента в смещение и колебания автоколлимационного изображения светящейся точки. Контрольный комплекс (фиг. 1) содержит: двигатель 1, ведущую каретку 2, контролируемый механизм 3, йналого-цифровой преобразователь (АЩ1)4, ЭВМ 5, АЦП 6, генератор 7 звуковых частот, дисплей 8, печатаю щее устройство 9. Оптико-механическое устройство (фиг. 2) содержит упругий элемент (например, тензобалку) 10, сферичес кое вынутое зеркало 11, автоколлима ционный микроскоп 12, содержащий св тящую точку 13, объектив 14 коллима тора, разделительную полупрозрачную пластинку 15, микрообьектив 16, пло кое зеркало 17, ахроматическую линзу 18 и диодную пластинку (линейку ПЗС) 19. Все оптико-механическое устройст жестко смонтировано на ведущей каретке 2, Способ осуществляется следующим образом. Контролируемый механизм 3 (фиг.1 - присоединяют гибкой, практически не растяжимой нитью к тензобалке 10 (фиг. 2), жестко укрепленной на ведущей каретке 2. После присоединени контролируемого механизма к тензоба ке,, на ней укрепляют сферическое вог нутое зеркало 11. Укрепив зеркало на тензобалке, проектируют автокол лимационным микроскопом 12 светяп1ую ся точку 13 на центр кривизны сфери ческого зеркала. После образования изображения светящейся точки в цент кривизны сферического зеркала лучи света, продолжая свой путь, попадаю на его поверхность и, отразившись о нее, собираются вновь в центре кривизны зеркала, образуя автоколлимаи ионное изображение светящейся точки, которое проектируют микроскопом 12 на линейку ПЗС 19. Присоединив контролируемый механизм 3 к тензобалке 10, укрепленной на ведущей каретке 2, и получив автоколлимационное изображение светящейся точки на линейке 19, включают двигатель 1 и задают движение ведущей каретке 2 и контролируемому механизму 3. С началом движ:ения постоянная составляющая силы сопротивления движению контролируемого механизма 3 изгибает тензобалку 10,. задавая ей предварительньй прогиб. Этот прогиб вызывает линейное смещение сферического зеркала 11 и вместе с ним смещение автоколлимационного изображения светящейся точки по линейке 19. Во время движения контролируемого (Механизма тензобалка непрерывно колебшется под действием переменной сосггавляющей той же силы сопротивления контролируемому движеникз. Колебания тензобалки 10 вместе с укрепленным , на ней сферическим зеркалом вызывают колебания автоколлимациопного изображения светящейся точки в плоскости .линейки ПЗС 19 относительно его смещенного положения, вызванного предварительным прогибом тензобалки. Смещение автоколлимационного изображения светящейся точки и ее колебание в плоскости линейки ПЗС преобразуют в электрические сигналы, которые затем АЦП преобразуют в цифровую форму. . Преобразованные таким путем в цифровую форму смещение и колебания автоколлимационного изображения светящейся точки поступают в ЭВМ, дополнительно с ними преобразуют сигналы генератора 7 в цифровую форму и передают их в ЭВМ. Путем детектирующего воздействия этими дополнительными сигналами генератора 7 на колебания автоколлимациондого изображения светящейся точки выделяют из них с помощью ЭВМ релаксационные периодичности. В начале устанавливают число периодичноетей, содержащихся в колебании автоколлимационного изображения светящейся точки, и период каждой из них. Для этого плавно изменяют частоту сигнала генератора 7 и фиксируют наступление резонанса по возрастанию амплитуды скрытой периодичности, у которой частота совпадает с соответствующей частотой сигнала генератора Установив число скрытых периодичностей и период каждой из них, определя ют ординаты каждой скрытой периодичности. Эти ординаты определяют с помощью ЭВМ и по ним на экране дисплея 8 получают график каждой скрытой периодичности, изображающий истинную форму последней. Обычно среди выявленных -скрытых периодичноетей есть гладкие и релаксационные периодичнос ти. По графикам отбирают релаксационные периодичности и по ним определяют результирующую релаксационную периодичность, ее амплитуду и отноше ние этой амплитуды к величине смещения автоколлимационного изображения светящейся точки. По величине этого отношения судят о плавности контроли руемого движения. Ординаты выявленных скрытых периодичностей и результаты всех выполня емых с помощью ЭВМ действий фиксиру ют печатающим устройством 9 в цифровой форме на бумажной ленте. Пример . Контролируемый механизм устанавливают на плите, присо диняют его ведущее звено к тензобалке и укрепляют на ней вогнутое сферическое зеркало. На центр кривизны зеркала /проектируют светящуюся точку и полу1чают на линейке ПЗС, расположенной в плоскости изображения автоколлимаци онного микроскопа, ее автоколлимационное изображение. Приводят в движени контролируемый механизм. В начале движения механизма под действием постоянной составляющей силы сопротивления контролируемому движению тензобалка получает предварительньй прогиб, величина которого обусловлена постоянной составляющей силы сопротивления. Предварительный прогиб тензобалки влечет за собой линейное смещение автоколлимационного изображения преобразуют в соответствующий электрический сигнал, который АЦП преобразует в цифровую форму и таким образом получают численное выражение смещения автоколлимационного изображения. Численное выражение фиксируют в.памяти ЭВМ и с помощью записывающего устройства на бумажной ленте. Во время последующего движения контролируемого механизма возникают колебания тензобалки, рызванные переменной составляюп1ей силы сопротивле1гип контролируемому движению, которые преобразуют в колебательные перемещения автоколлимационного изображения светящейся точки по той же линейке ПЗС. Колебательные смещения ПЗС преобразуют в электрические сигналы, которые АЦП преобразуют в цифровую форму. Преобразованные в цифровую форму колебания автоколлимационного изображения светящейся точки фиксируют в памяти ЭВМ и на бумажной ленте в виде массива чисел. Кроме колебаний автоколлимационного изображения светящейся точки, получают от генератора звуковой частоты электрические колебания с извес.тной формой, постоянной амплитудой и переменной частотой. Эти колебания также преоб раэуют в цифровую форму, а затем с их помощью выявляют число скрытых периодичностей, содержа цихся в колебаниях автоколлимационного изображения светящейся точки, и период каждой из них. Плавно изменяя частоту сигнала генератора, получают набор численных значений ординат колебаний с заранее известными и неизменными формой и амплитудой. В этом наборе каждой частоте сигнала генератора соответствуют определенные численные величины ординат и период колебания. Путем детектирующего воздействия этим набором ординат на массив чисел, характеризующий колебания автоколлимационного изображения светящейся точки, фиксируют наступление резонанра для каждой скрытой .периодичности, содержащейся в этих колебаниях. Число фиксированных резонансов - число скрытых периодичностей. Таким же образом устанавливают и период каждой скрытой периодичности, содержащийся в колебаниях автоколлимационного изображения светящейся точки. С помощью ЭВМ определяют ее ординаты и по ординатам получают на экране диспеля график, на котором видна истинная форма каждой выявленной скрытой периодичности. По графикам отбирают релаксационные периодичности и по отобранным периодичностям с помощью ЭВМ определяют ординаты их результирующей, амплитуду последней и отношение этой амплитуды к величине смещения S1 автоколлимациоиного изображения светящейся точки, обусловленного предварительным прогибом тензобалки. Формула изобретения Способ контроля плавности движения механизма прибора путем преобразования колебаний упругого элемента, закрепленного на контролируемом механизме, в электрические колебания 83 о т -л и а ю щ и и с я тем, что. целью повышения достоверности контроля, на электрические колебания воздействуют дополнительными колебаниями с известными параметрами, фиксируют резонансные частоты, определяют на каждой частоте форму колебаний, выделяют из них релаксационные колебания, а о плавности движения механизмов судят по суммарному значению релаксационных колебаний,
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАЦИОННЫЙ СПОСОБ КОНТРОЛЯ ОШИБКИ СТАБИЛИЗАЦИИ ОПТИЧЕСКИХ СТАБИЛИЗАТОРОВ | 2016 |
|
RU2622088C1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| Фотоэлектрическое автоколлимационное устройство | 1990 |
|
SU1737264A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2010 |
|
RU2441199C1 |
| Оптическое фотоэлектрическое устройство | 1990 |
|
SU1753444A1 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| Устройство компенсации погрешностей обработки на металлорежущих станках | 1986 |
|
SU1706836A1 |
Изобретение относится к оптическому и электронно-оптическому приборостроению и позволяет повысить достоверность контроля. Контролируемый механизм 3 устанавливают на плите, присоединяют его ведущее звено к тензобалке и укрепляют на ней вогнутое сферическое зеркало. На центр кривизны последнего проектируют светящзтося точку на линейке ПЗС. Приводят в движение контролируемый механизм 3,.тензобалка получает предварительный прогиб, который влечет за собой смещение автоколлимационного изображения. Эти колебательные смещения преобразуют . в электрические сигналы, которые аналого-цифровые преобразователи 4 и 6 преобразуют в цифровую форму и фиксируют в памяти ЭВМ 5 и на бумажной ленте в виде массива чисел. Путем детектирующего воздействия на массив чисел набором ординат, получаемых плавньм изменением частоты сигнала генератора 7, фиксируют наступление € резонанса для каждой скрытой перио(Л дичности. Опредехшют с помощью ЭВМ 5 ординаты их результирующей, амплитуду последней и отношение ее к величине смещения автоколлимационного изображения светящейся точки, обусловленного предварительным прогибом тензобалкк. 2 ил. ю Oi К5 оо оо
Фи.2
| Шнейдер Ю.Г | |||
| и др | |||
| Исследование зависимости плавности прямолинейного движения в механизмах точньхх приборов от вида микрорельефа контактирующих поверхностей.- Известия вузов | |||
| Приборостроение, 1972, ХУ, № 7, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
