изобретение относится к электроизмерительной технике и может быть использовано при создании устройств диагностики стержней ротора асинхрон :ного двигателя в рабочем режиме. Цель изобретения - повьпнение достоверности контроля за счет увеличения УСТОЙЧИВОСТИ функционирования при определении повреждений стержней короткозамкнутого ротора асинхронного двигателя в рабочем режиме. На чертеже показана структурная схема устройства. Устройство содержит датчик 1 тока подключенный через последовательно соединенные первый усилитель 2, вьтрямитель 3, первый фильтр 4 низкой частоты, режекторный фильтр 5, нульорган 6, формирователь 7 пилообразно го напряжения, третий фильтр 8 низкой 20
частоты к первому входу второго усилителя 9, к второму входу которого подсоединен выход порогового элемента 10, а его вход подключен к выходу третьего фильтра 8 низкой частоты. Третий вход второго усилителя 9 через блок 11 нелинейности и второй фильтр 12 низкой частоты подсоединен к вьтрямителю 3. Выход второго усилителя 9 подключен к индикатору 13. В устройстве выделяют тракт измерения скольжения (1-9), тракт формирования нелинейной зависимости величины нагрузки двигателя в функции скольжения (11-12), пороговый элемент 10, индикатор 13, В первом тракте нуль-орган 6, формирователь 7 пилообразного напряжения и третий фильтр 8 низкой частоты производят преобразование периода скольжения в пропорциональную величину постоянного напряжения, а вьтрямитель 3 обеспечивает возможность фильтрации сигнала. Совместное использование обоих трактов позволяет контролировать и измерять степень повреждения ротора работающего двигателя.
Устройство работает следующим образом. Датчик 1 измеряет величину потреб- 50 ки от
ляемой мощности двигателя или при постоянной величине питающего напряжения величину тока- статора. Усилитель 2, например операционньй, согласует датчик 1 с входными блоками. Сигнал с Датчика 1 имеет форму амплитудно-модулированного сигнала при .обрыве части стержней ротора, поэтоДля получения постоянного сигнала, пропорционального периоду скольжения, сначала прямоугольные импульсы преобразуются в формирователе 7 в пилообразное напряжение, затем в фильтре 8 выделяется постоянная составляющая из поступающего на него сигнала. Чем больше период скольжения, тем до большей величины успевает возрасти
напряжение в формирователе 7 пилообразного напряжения и соответственно больше будет постоянная составляющая на выходе фильтра 8.
При изменении нагрузки на валу двигателя происходит изменение скольжения двигателя, причем эта зависимость нелинейна. Для повышения точности контроля состояния ротора необходимо учитывать эту зависимость скольжения от нагрузки. После вьтрямления в выпрямителе 3 сигнал, пропорциональный величине сигнала нагрузки, .сглаживается во втором фильтре 12 низкой частоты. Характеристика блока 1 1 нелинейности обеспечивает в стащюнарном режиме работы двигателя ра.венство сигнала о величине скольже1ния от фильтра 8 и нагрузки от фильтра 12 при изменении величины нагруззначения. Блок 11 нелинейности может быть выполнен с использованием операционных усилителей и диодов. Сигналы о величине нагрузки и скольжения подаются на операционный усилитель 9. Он позволяет алгебраически суммировать поступающие на его входы сигналы, при этом сигналы подключаются к 52 му для вьщеления низкочастотной сое тавлягощей сигнала необходимо предварительно произвести вьтрямление сигнала в вьтрямителе 3. Появление оги.бающей низкой частоты с периодом скольжения вызвано наличием обрьша части стержней ротора. С помощью первого фильтра 4 низкой частоты и режекторного фильтра 5, настроенного на частоту питающей сети, производится выделение огибающей низкой частоты. Нуль-орган 6, который может быть выполнен на операционном усилителе без обратной связи или с нелинейным элементом в обратной связи (диод, стабилитрон), преобразует переменный сигнал в прямоугольные импульсы, длительность которых определяется низкочастотной огибающей, т.е. пропорциональна частоте скольжения ротора. холостого хода до номинального
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения повреждений короткозамкнутого ротора асинхронного двигателя | 1984 |
|
SU1182447A1 |
| Способ защиты асинхронного электродвигателя от перегрузки | 1988 |
|
SU1642548A1 |
| Устройство для контроля исправности стержней ротора короткозамкнутого асинхронного электродвигателя | 1991 |
|
SU1802346A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2007 |
|
RU2356061C1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство выявления асинхронного режима синхронного генератора | 1981 |
|
SU1029308A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1981 |
|
SU1001410A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ РАЗРУШЕНИЯ ПОДШИПНИКОВ | 1995 |
|
RU2095909C1 |
Изобретение относится к электроизмерительной технике. Цель изобретения - повышение достоверности контроля. Устройство содержит датчик 1 тока, усилитель 2, фильтр 4 низкой частоты и режекторный фильтр 5. Введение выпрямителя 3, нуль-органа 6, формирователя 7 пилообразного напряжения, фильтров 8 и 12 низкой частоты, усилителя 9, порогового элемента 10, блока 11 нелинейности и индикатора 13 увеличивает устойчивость функционирования при определении повреждений стержней короткозамкнутого ротора асинхронного двигателя в рабоi чем режиме. 1 ил. (Л to Од Is9 N9 СД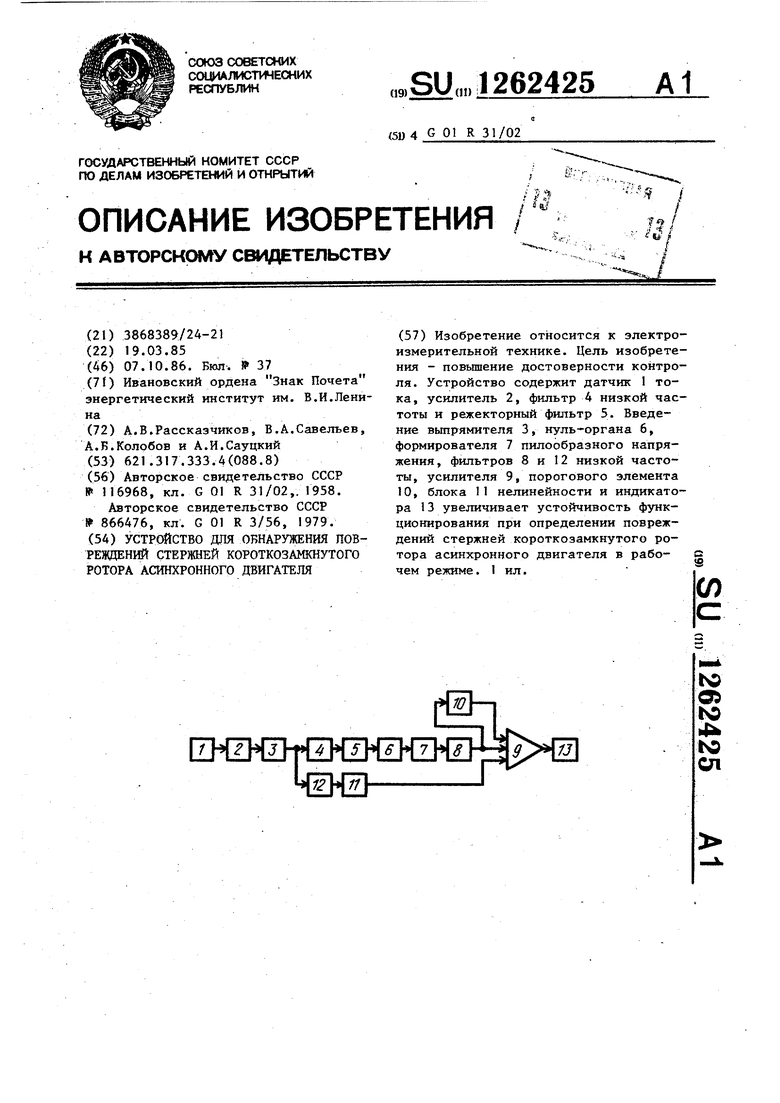
| Способ изготовления оригиналов иллюстраций, имитирующих автотипию | 1958 |
|
SU116968A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Реактивная дисковая турбина | 1925 |
|
SU1958A1 |
| Устройство для измерения абсолютного скольжения асинхронной машины | 1979 |
|
SU866476A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
