1..
Изобретение относится к электротех нике и можег быть использовано в элек-. тро.привоцах общепромышленных механизмов.
Известно устройство цля регулирования скорости асинхронного элекгроцвигатёля, содержащее тиристорные коммутаторы в цепи обмотки статора и в цепи ротора электродвигателя, блок импульсно-фазо- вого управления, подключенный выходами к тиристорным коммутаторам, датчик скорости электродвигателя, соединенный с входом блока импульсно-фазового управления 11 Недостатком данного устройства является сложность системы управления цля двух тиристорных коммутаторов, которая содержит раздельные каналы формирования управляющих импульсов.
Наиболее близким к предлагаемому является устройство для регулирования скорости асинхронного электроцвигатопя, содержащее резисторы, соединенные звездой и подключенные к обмотке ротора
электродвигателя, тиристорный коммутатор, подключенный параллельно резисторам, три блока импульсно-фазового управления, выполненные из последовательно соединенных блока синхронизации, генератора пилообразного напряжения, нуль органа и формирователя импульсов, соединенного выходом с управляющим входом тиристорного коммутатора, параллельно которому подключен вход блока синхрони10зации, сумматор, один вход которого соединен с первым выходом блока задания, другой вход соединен с датчиком скорости электродвигателя, а выход - с входом регулятора скорости 2j .
15
Недостатком известного устройства является то, что регулирование скорости электродвигателя осуществляется в области большого скольжения, а в области малых скольжений из-за низкой частоты
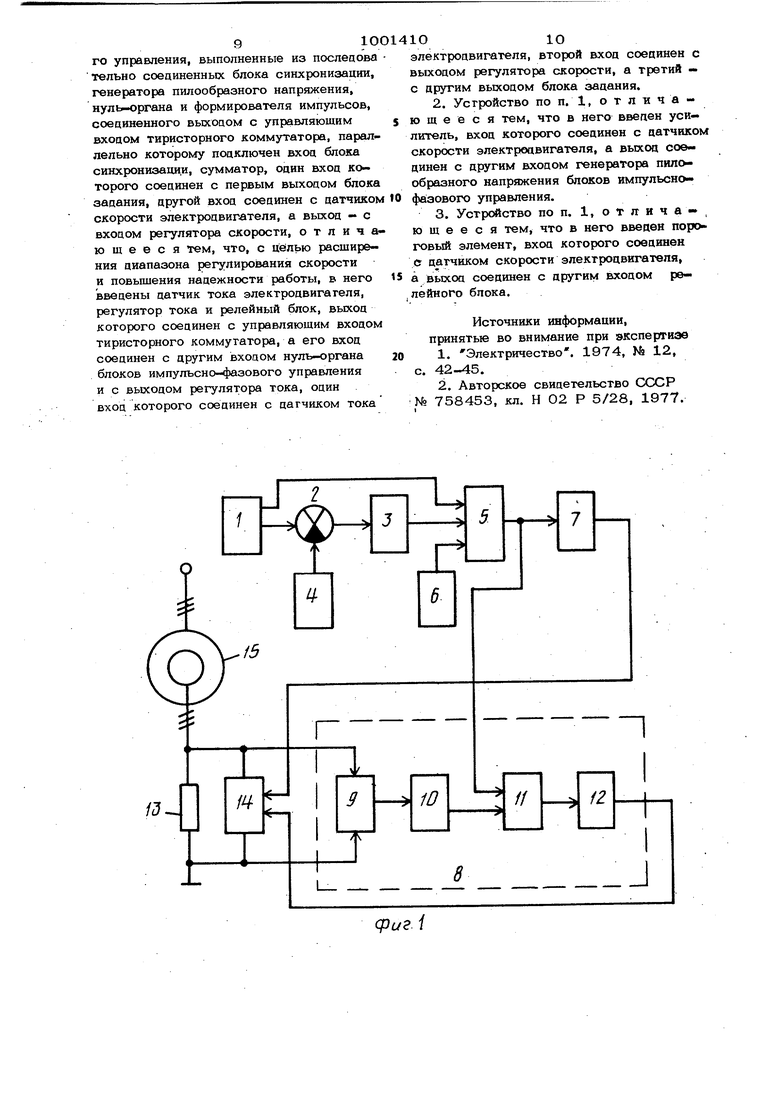
20 напряжения в обмотке ротора блок импульсно-фазового управления работает неустойчиво. При выходе из строя элементов блока импульсно-фазового управления 310 устройствостановится неработоспособным, так как теряет управляемость тиристорнмй коммутатор. Известное устройст яри использозании регулятора скорости в замкнутой системе регулирования с запазцыванием отрабатьшает возмущающие и задающие воздействия, что снижает точность поцдержания заданной скорости и соответственно диапазон регулирования. Цель изобретения - расширение диапазона регулирования скорости электродвигателя и повьпиение надежности работы устройства. Указанная цель достигается тем, что в устройство для регулирования скорооти асинхронного электродвигателя введе ны датчик тока электродвигателя, регулятор тока и релейный блок, ВЬЕХОЦ которого соединен с управляющим входом тирис . торного коммутатора, а его вход соединен с другим входом нуль-органа блоков импульсно-фазового управления и с выходом регулятора тока, один вход которого соединен с датчиком тока электродвигателя, второй вход соединен с выходом регулятора скорости, а третий вход с другим выходом блока задания. Устройство также содержит усилитель вход которого соединен с датчиком скорости асинхронного электродвигателя, а вых.од соединен с другим входом генератора пилообразного напряжения блоков импульсно-фазового управления. Кроме того, устройство содержит пороговый элемент, вход которого соединен с датчиком скорости электродвигателя, а выход соединен с другим входом релейного блока. На фиг. 1 показана блок-схема предла гаемого устройства,- на фиг. 2 - схема релейного блока; на фиг. 3 - схема вклю чения усилителя, , на фиг. 4 - схема порогового элемента. Устройство содернсиг блок 1 задания, один выход которого соединен с входом сумматора 2, подключенного выходом к . входу регулятора 3 скорости, а другим входом к датчику 4 скорости электродвигателя, регулятор 5 тока одним входо соединен с датчиком 6 тока электродвигателя, вторым входом соединен с выходом регулятора 3 скорости, а третьим входом - с другим выходом блока 1 за дания, релейный блок 7, вход которого соединен с выходом регулято.ра 5 тока, три блока а импульсно -фазового управле ния, состоящие из последователъно соединенных блока 9 синхронизации, генератора 10 пилообразногю напряжения, нуль10412 импульоргана 11 и формирователя сов, резисторы 13 в цепи обмотки ротора электродвигателя, параллельно которым подключен тиристорный коммутатор 14 и вход блока 9 синхронизации блока 8 им- , пульсно-фазового управления, управляющий вход тиристорного коммутатора 14 соединен с выходом формирователя 12 импульсов и с выходом релейного блока 7, выход регулятора 5 тока соединен с другим входом нулъ органа 11 блоков 8 импульсно-фазового управления. Обмотка статора электродвигателя 15 подключены к источнику переменного тока. Релейный блок 7 содержит два операционных усилителя 16 и 17, охваченные положительной обратной связью, инвертирующие входы которьк соединены с выходом регулятора 5 тока, а неинвертирующие входы подключены к регулируемым источникам опорного напряжения. Выходы операционных усилителей 16 и 17 через диоды соединены с базами соответствующих транзисторов. 18 и 19, работающих в ключевом режиме. В коллекторные цепи транзисторов 18 и 19 включены катушки реле 20 и 21, контакты которых включены в цепи управления тиристорным коммутатором 14. С выходом датчика 4 скорости электродвигателя соединен вход усилителя 22, выход которого соединен с другим входом генератора 10 пилообразного напряжения блоков 8 импулЬсно-фазово- го управления, а также выход датчика 4 скорости электродвигателя соединен через пороговый элемент 23 с другим входом релейного блока 7. Устройство работает следующим образом. На входы сумматора 2 подаются напряжения с первого выхода блока 1 задания и с датчика 4 скорости электродвигателя, которые пропорциональны, соответственно, задаваемой и действительной скорости электродвигателя 15. Сигнал ошибки с выхода сумматора 2 поступает на вход регулятора 3 скорости, выходной сигнал которого, зависящий от точности воспроизведения заданного закона скорости, подается на вход регулятора 5 тока. На другие входы регулятора 5 тока подаются соответственно сигналы с выхода датчика 6 тока электродвигателя и другого выхода блока 1 задания, который пропорционален динамической составляющей тока (требуемому ускорению) асинхронного электродвигателя 15. Управляющее воздействие с выхода регулятора 510 5тока поцается на управляющие вхоаы всех блоков 8 импульсно-фазового управ ления (вхоаы нуль-органов 11). На вхоц нуль-органа 11 подается напряжение с выхоца генератора 10 пилообразного напряжения, который запускается блоком 9 синхронизации при перехоце полуволны соответствующего фазного напряжения через нуль. Когда напряжение пилообразной формы на одном входе нуль-органа 11 станет равным напряжению управления на его входе, то формирователь 12 вырабатывает управляюший импульс, который поступает в управляющую цепь тиристорного коммутатора 14. Открываясь, коммутатор 14 шунтирует параллельно включенный ему резистор 13 в соответствующей фазе роторной цепи в каждый полупериод фазного напряжения При этом изменяется результирующий то в цепи обмотки ротора электродвигателя 15, обеспечивая задаваемые блоком 1 законы изменения скорости и ускорения. В процессе регулирования скорости электродвигателя 15 регулятор 5 тока совместно с датчиком 6 тока обеспечивают быструю отработку возмущающих и задающих воздействий. При действии возмущающих воздействий изменяется прежде всего то;с электродвигателя и, следовательно, сигнал на выходе датчика 6тока и входе регулятора 5 тока. На выходе регулятора 5 тока формируется управляющий сигнал, который через блок 8 импульсно-фазового управления воздей ствует на тиристорный коммутатор 14, изменяющий величину тока ротора электро двигателя 15 до прежнего уровня. Устройство регулирования скорости электродвигателя построено., по двухканальному принципу, в котором на входы регулятора 5 тока подаются сигналы, как с регулятора 3 скорости, так и непосредственно с другого выхода блока 1 задания, алгебраическая сумма которы является задающим воздействием регулятора тока. Задающее воздействие по ускорению (динамической составляющей тока), которое подается на третий вход . регулятора 5 тока, повьпиает быстродействие устройства и точность регулирования скорости. Так, например, при разгоне электродвигателя 15 с линейным законом изменения скорости в начальный момент времени уровень сигнала задания скорости на первом выходе блока 1 небольшой. Из-чза конечного значения чувствительности реальных элементов устройства (сумматора 2, регулятора 10 3 скорости) задающее воздействие на выходе регулятора 3 скорости появится с некоторым запаздыванием во времени относительно сигнала на первом выходе блока задания, что неблагоприятно сказывается на быстродействии и точности регулирования скорости. Однако сигнал на втором выходе блока 1 задания и, следовательно, на третьем входе регулятора 5 тока является постоянным по величине и равен производной по времени от сигнала на его первом выхопе. Регулятор 5 тока раньше включится в работу, обеспечивая требуемый закон - изме- нения скорости электродвигателя 15. С выхода регулятора 5 тока управляющий сигнал поступает также на вход релейного блока 7, имеющего зону нечувствительности (инвертирующие входы операциош1ых усилителей 16 и 17, работающих в релейном режиме). Если абсолютная величина сигнала на входе релеЛного блока 7 меньще его порога срабатывания, т.е. меньше опорных напряжений, подаваемых на неинвертирующие входы усилителя 16 и 17, то напряжение на их выходах будут соответственно отрицатель ной и положительной полярностей. Поэтому тр зисторы 18 и 19 заперты, а электромагнитные реле 2О и 21 обесточены. При этом регулирование скорости электродвигателя 15 осуществляется тиристорным коммутатором 14 с фазовым управлением. Если входной сигнал релейного блока 7 больше его порога срабатывания и положительной полярности, что соответст вует превышению сигнала задания по току на входе регулятора 5 тока над деист вительным значением сигнала с выхода датчика 6, то на выходе операционного усилителя 17 появляется напряжение отрицательной полярности. Транзистор 19 отпирается и реле 21 срабатывает. При применении в качестве коммутатора 14 двух встречно-параллельно соединенных тиристоров их управляющие электроды контактными группами реле 21 отключаются от выхода формирователя 12 импульсов и соединяются межцу собой. При этом тиристоры открываются поочередно в каждую полуволну фазного напряжения при переходе его через нуль, чем обеспечивается постоянное шунтирование резистора 13 в каждой фазе ротора электродвигателя 15. Ток в цепи обмотки ротора, ускорение и скорость электродвигателя возрастает, что приводит к увели- чению сигналов на выхоцах цатчиков 4 и 6 скорости и тока. Управляющий сигнал на выходе регулятора 5 тока уменьшаеМ ся и, если он становится меньше порога срабатывания релейного блока 7, то электромагнитное реле 21 о сточивается и устройство автоматически переводится в режим фазового управления тиристорными коммутаторами 14. Если входной сигнал релейного блока 7 болыие его порога срабатывания и огрицательной полярности, что соответствует превышению сигнала с выхода датчика 6 тока над сигналом задания по току, то на выходе операционного усилителя 16 появляется напряжение положительной; полярности. Транзистор 18 отпирается и реле 2О срабатывает. Его контактные группы отключают управляющие электрЬцы всех тиристоров коммутатора 14 от выкода формирователей 12 импульсов. Тирис- 20 ти
торный коммутатор 14 закрыт и не шунтирует резисторы 13, что приводит к уменьшению тока ротюра и замедлению электродвигателя 15. Сигналы на выходах датчиков .4 и 6 скорости и тока yMeHb-. шаются. Управляюший сигнал на выходе регулятора 5 тока уменьшается по абсолютной величине и, когда он становится , меньше порога срабатывания релейного блока 7, устройство переводится в режим фазового управления тиристорным коммутатором 14. Таким образом, предлагаемое устройство обеспечивает два режима регулировакгая скорости электродвигателя 15. В первом режиме, когда управляющее воздействие на выходе регулятора 5 тока меньше порога срабатывания релейного блока 7, устройство осуществляет регулирование скорости путем фазового управления тиристорами коммутатора 14. Во втором режиме, когда абсолютная величина управляющего воздействия на выходе регулятора 5 тока превышает порог срабатывания релейного блока 7, устройство обеспечивает релейное регулирование скорости электродвигателя 15 при периоди. ческом шунтировании резисторов 13 в цепях обмотки ротора. В этот режим предлагаемое устройство автоматически переводится при действии значительных по величине возмущающих и задающих воздействий для быстрой их отработки. Поскольку этот режим работы осуществляется без использования блоков 8 импульс но-фазово1-чз управления, то устройство выполняет свои функции и при их неисправности или нарушении синхронизации в области номинальной скорости. 10р
коэффициента передачи усилителя 22, амплитуда пилообразного напряжения не меняется при изменении времени развертки. Если напряжение на выходе датчика 10 в режиме фазового управления точность регулирования снижается в связи с изменением амплитуды и частоты ЭДС обмотки ротора. Генератор 10 пилообразного напряжения запускается блоком 9 син- хрюнизации при переходе полуволны фазного напряжения через нуль, частота которого уменьшается при увеличении скоро сти электродвигателя 15. Для обеспечения постоянной амплитуды напряжения развертки на другой вход генератора Ю пилообразного напряжения через усилитель 22 (фиг. З) подается напряжение, пропорциональное скорости электродвигателя, с полярностью, противоположной полярности опорного напряжения генератора 1О. Суммарное напряжение, подаваемое на вход генератора 1О пилообразного напряжения, уменьшается с увеличением скороедвигателя и; при определенном выборе 4 скорости меньше напряжения срабать вания порогового элемента 23,то управляющий сигнал с выхода регулятора 5 тока не поступает на инвертирующий вход операционного усилителя 17 и электромаг нитное реле 21 обесточено. Этим предотвращается возможность полного щунти- рования коммутаторами 14 резистора 13 в начальный период пуска электродвигателя 15 (при малых скоростях) и, следовательно, обеспечивается ограничение пусковых токов через управляемые вентили коммутатора 14. Таким образом, предлагаемое устройст во обеспечивает широкий диапазон регулиров ния скорости электродвигателя, так как устойчивая работа электродвигателя возможна в области малых скольжений при релейном режиме работы тиристорного коммутатора. Переход в релейный режим работы осуществляется также при неисправности блока импульсно-фазового управления, чем повышается надежность работы устройства. Формула изобретения 1. Устройство для регулирования скорости асинхронного электродвигателя, содержащее резисторы, соединенные . Звездой и подключенные к обмотке ротора, электродвигателя, тиристорный коммутатор, подключенный параллельно резисторам, три блока импульсно-фазово91Ого управления, выполненные из послецова тельно соединенных блока синхронизации, генератора пилообразного напряжения, нуль -органа и формирователя импульсов, соединенного выходом с управляющим входом тиристорного коммутатора, параллельно которому подключен вход блока синхронизации, сумматор, один вход которого соединен с первым выходом блока задания, другой вход соединен с датчиком скорости электродвигателя, а выход - с входом регулятора скорости, отлича ющееся тем, что, с целью расширения диапазона регулирования скорости и повыщения надежности работы, в него введены датчик тока электродвигателя, регулятор тока и релейный блок, выход которого соединен с управляющим входом тиристорного коммутатора, а его вход соединен с другим входом нуль-органа блоков импульсно-фазового управления и с выходом регулятора тока, один вход которого соединен с датчиком тока 1010 электродвигателя, второй вход соединен с выходом регулятора скорости, а третий - с другим выходом блока задания. 2.Устройство по п. 1, отличающееся тем, что в него введен усилитель, вход которого соединен с датчиком скорости электродвигателя, а выход соединен с другим входом генератора пилообразного напряжения блоков импульснофазового управления. 3.Устройство по п. 1, о т л и ч а - , ю щ е е с я тем, что в него ввецен пороговый элемент, вход которого соединен с датчиком скорости электродвигателя, а вьосоц соединен с другим входом релейного блока. Источники информации, принятые во внимание при экспертизе 1.Электричество. 1974, № 12, с. 42-45. 2.Авторское свидетельство CXXiP N9 758453, кл. Н 02 Р 5/28, 1977.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ТОПЛИВНО-РЕГУЛИРУЮЩЕЙ АППАРАТУРЫ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ | 1991 |
|
RU2008642C1 |
| Асинхронный электропривод | 1989 |
|
SU1753576A1 |
| Асинхронный тиристорный электропривод | 1981 |
|
SU1001411A1 |
| Устройство для экстремального управления асинхронным электродвигателем | 1988 |
|
SU1653111A1 |
| Устройство для управления электродвигателем постоянного тока | 1983 |
|
SU1141550A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Асинхронный электропривод | 1986 |
|
SU1334346A1 |

(риг. i Tl
