(21)4619025/07
(22)13.12.88
(46) 15.04.91. Бкш. № 14 (72) А.В.Булычев, Е.В.Кулаков и В.Л.Третьяков (53) 621.316.925(088.8) (56) Гейлер А.Б. Основы электропривода. Минск, Высшейшая школа, 1972, с.240-247,
Кофлин Р.., Дрискол Ф. Операционные усилители и линейные интегральные схемы. М.: Мир, 1979.
Авторское свидетельство СССР № 1001294, кл. Н 02 Н 7/085, 1981.
(54) СПОСОБ ЗАЩИТЫ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПЕРЕГРУЗКИ (57) Изобретение относится к электротехнике и предназначено для защиты асинхронного электродвигателя от перегрузки. Цель изобретения - повышение чувствительности защиты электродвигателя к перегрузкам, вызываемым механическими дефектами, возникающими при повреждении подшипников и нарушении центровки валов электродвигателя и механизма. Цель достигается тем, что в способе защиты электродвигателя от перегрузки, при котором контролируют температуру электродвигателя по току статора с помощью теплового аналога защищаемого электродвигателя, дополнительно из тока статора выделяют составляющие с частотами, отличными от частоты источника питания. Измеряют величину этих составляющих и по ней выявляют механические дефекты в начальной стадии развития. 5 ил.
§
(Л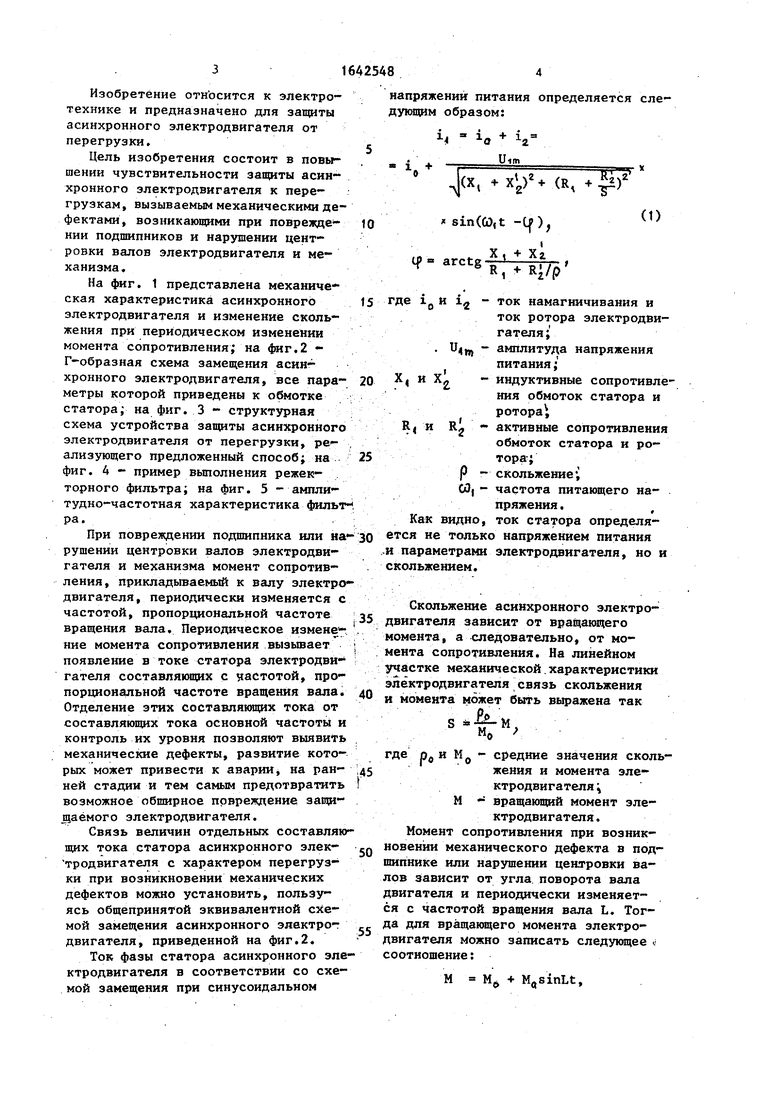


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ РАЗРУШЕНИЯ ПОДШИПНИКОВ | 1995 |
|
RU2095909C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2007 |
|
RU2356061C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| СПОСОБ ЗАЩИТЫ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ ОТ ЗАТЯНУВШЕГОСЯ ПУСКА | 2000 |
|
RU2178613C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |
| Способ импульсного управления асинхронным электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1987 |
|
SU1539949A1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| Устройство для защиты электродвигателя от перегрузки при пуске | 1983 |
|
SU1141502A1 |
| Устройство для защиты от асинхронного режима синхронного электродвигателя | 1989 |
|
SU1647745A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2010 |
|
RU2441249C1 |


-т Фт1
Изобретение отн осится к электротехнике и предназначено для защиты асинхронного электродвигателя от перегрузки,
Цель изобретения состоит в повышении чувствительности защиты асинхронного электродвигателя к перегрузкам, вызываемым механическими дефектами, возникающими при поврежде- нии подшипников и нарушении центровки валов электродвигателя и механизма.
На фиг. 1 представлена механическая характеристика асинхронного электродвигателя и изменение скольжения при периодическом изменении момента сопротивления; на фиг.2 - Г-образная схема замещения асинхронного электродвигателя, все пара- метры которой приведены к обмотке статора; на фиг. 3 - структурная схема устройства защиты асинхронного электродвигателя от перегрузки, реализующего предложенный способ; на фиг. 4 - пример выполнения режек- торного фильтра; на фиг. 5 - амплитудно-частотная характеристика фильт ра.
При повреждении подшипника или рушении центровки валов электродвигателя и механизма момент сопротивления, прикладываемый к валу электродвигателя, периодически изменяется с частотой, пропорциональной частоте вращения вала. Периодическое измене - ние момента сопротивления вызывает появление в токе статора электродвигателя составляющих с частотой, пропорциональной частоте вращения вала. Отделение этих составляющих тока от составляющих тока основной частоты и контроль их уровня позволяют выявить механические дефекты, развитие которых может привести к авария, на ран- ней стадии и тем самым предотвратить возможное обширное повреждение защищаемого электродвигателя.
Связь величин отдельных составляющих тока статора асинхронного элек- тродвигателя с характером перегрузки при возникновении механических дефектов можно установить, пользуясь общепринятой эквивалентной схемой замещения асинхронного электро- двигателя, приведенной на фиг.2.
Ток фазы статора асинхронного электродвигателя в соответствии со схемой замещения при синусоидальном
напряжении питания определяется следующим образом:
i - i0 Ч
lo +
Uim
J(,
sin(0)«t -tf ),
4mnct lltll/f
(1)
ток намагничивания и
ток ротора электродвигателя ; амплитуда напряжения
питания;
индуктивные сопротивления обмоток статора и ротора
активные сопротивления обмоток статора и ротора;
скольжение; частота питающего напряжения .
ток статора определянапряжением питания электродвигателя, но и
Скольжение асинхронного электродвигателя зависит от вращающего момента, а следовательно, от момента сопротивления. На линейном участке механической характеристики электродвигателя связь скольжения и момента может быть выражена так
-%«
где р0 и М0 - средние значения сколжения и момента электродвигателяМ - вращающий момент электродвигателя .
Момент сопротивления при возникновении механического дефекта в подшипнике или нарушении центровки валов зависит от угла поворота вала двигателя и периодически изменяется с частотой вращения вала L. Тогда для вращающего момента электродвигателя можно записать следующее соотношение:
М
М& + MasinLt,
где М„ - амплитуда вращающего момен
та.
Отсюда ясно, что скольжение электродвигателя, имеющего механический дефект, является переменной величиной, изменяющейся с частотой L Л
l inLtПериодическое изменение скольжения, как видно из выражения (1), вызывает периодическое изменение эквивалентного сопротивления электродвигателя. Изменение этого сопротивления в свою очередь вызывает изменение тока статора с частотой L. Однако, источник питания имеет частоту W,, отличную от L, и, следовательно в токе статора появляются составляющие не только с частотой сд,, но и с частотой L
-It) i, - i, + -:;---,
f. + -p ;irrr V .
Pa -irV Соотношение параметров электродвигателей обычно таково, что
, + , v iгде
X
о р
Поэтому с целью получения наглядных зависимостей при приемлемой точности описания можно принять,что X л + Х2 Rf О, тогда для тока статора будем иметь
sin (CO, t -if) + г
. baЈ9sinLt8in(6, кг
Подставив в это уравнение значение тока намагничивания и разложив произведение синусоидальных функций на две составляющие, получим, что ч Ion,sin(W,t-4) +
UimPo
Ч
sin(W, t-lf) +
(2)
Гсоз((Н-М) - cos(y t-lf),
где G) - амплитуда и фаза тока намагничивания,
Р СО, - L ; у + L ,
Как видно, ток статора при механических повреждениях электродвигателя содержит составляющие с часто
,
10
15
20
25
30
2
35
тами, равными частоте источника питаний G)( , разности частот источника питания и вращения ротора 0 С0( - L и сумме у G), + L .,
Величины составляющих тока статора с частотами, отличными от частоты источника питания, определяются, главным образом, как следует из (2), амплитудой переменной составляющей скольжения, а также напряжением питания и параметрами электродвигателя .
В нормальней эксплуатационных режимах момент сопротивления, а следовательно, и в ащаюадй момент электродвигатели не зависит от угла поворота вала и не содержат переменной составляющей момента. Поэтому скольжение не изменяется периодически и в токе статора отсутствуют составляющие с частотами и и У , отличными от &)(v
По уровню составляющих тока статора с частотами, отличными от С0 , оценивают уровень периодической составляющей момента двигателя и, следовательно, выявляют механические дефекты, которые вызывают появлете этих периодических составляющих момента сопротивления.
Способ реализуется с помощью уст- роства, схема которого показана на фиг.3.
Устройство содержит защищаемый электродвигатель 1, датчик 2 тока, включенный в цепь статора электро- . двигателя, квадратор 3, тепловой аналог 4 защищаемого электродвигателя и 40 пороговый элемент 5, включенные кас- кадно, логический элемент ИЛИ 6, первый вход которого подключен к выходу порогового элемента, исполнительный орган 7, вход которого соединен с 45 выходом логического элемента, режек- торный фильтр 8, предназначенный для подавления сигналов с частотой, равной частоте источника питания, входом подключенный к выходу датчика 5Q тока, формирователь модуля 9, фильтр нижних частот tO и второй пороговый элемент 11, соединенные каскадно. Выход второго порогового элемента подклаюнйн ко второму входу логического элемента,
Устройство работает следующим образом.
На вход квадратора 3 с выхода датчика 2 подается сигнал, пропорцио55
нальный току обмотки статора защищаемого двигателя 1. Квадратор 3 формирует сигнал, пропорциональный кварату тока статора, который подается на вход теплового аналога 4. В нем моделируются тепловые процессы, происходящие в защищаемом электродвигателе и формируется сигнал, пропорциональный температуре электродвигателя, который подается на вход первого порогового элемента 5. При увеличении нагрузки двигателя уровень этого сигнала повышается и при достижении им предельно допустимого уровня пороговый элемент 5 вырабатывает сигнал, который через логически элемент 6 поступает на вход исполнительного органа 7. Исполнительный орган вырабатывает сигнал, по которому двигатель разгружается или отключается от сети.
При повреждении подшипников или нарушении центровки валов нагрузка электродвигателя увеличивается, но уровень выходного сигнала теплового аналога может оставаться в пределах допустимого. Для предотвращения значительных повреждений электродвигателя при перегрузках, вызванных развитием этих дефектов, целесообразно отключать его, не допуская развития дефектов.
Предлагаемое устройство содержит узлы, позволяющие выявлять незначительные механические перегрузки периодического характера по току статора защищаемого электродвигателя. С помощью режекторного фильтра 8, подключенного к выходу датчика .тока 2, подавляются составляющие тока статора с частотой, равной частоте источника питания. Выходной сигнал режекторного фильтра 8 выпрямляется формирователем модуля 9 и сглаживается фильтром нижних частот 10. Второй пороговый элемент 11 сравнивает выходной сигнал фильтра нижних частот 10 с предельно допустимым значением. При возникновении дефектов, вызывающих увеличение периодической составляющей момента, входной сигнал порогового элемента 11 повышается, и при достижении им предельно допустимого значения пороговый элемент формирует второй си нал, информирующий о возникновении механического дефекта, который через логический элемент 6 поступает
0
5
0
5
0
5
на вход исполнительного органа 7.
Выделение сигналов с частотами, отличными от частоты источника питания, из тока статора осуществлят- ся режекторым фильтром, который подавляет сигналы с частотой, равной Q, , и пропускает сигналы с частотами, отличными от GOj,
Режекторный фильтр с максимальным ослаблением сигналов на частоте СО 314,6 с более, чем в 100 раз может быть выполнен по известной схеме (Л2), показанной на фиг.4.
На фиг.5 приведена амплитудно- частотная характеристика этого фильтра, полученная при следующих параметрах фильтра: С1 С2 0,047 мкФ, Rq 1000 Ом, RB 50 кОм, R, 67,725 кОм, RI, 677,25 кОм.
Применение предлагаемого способа защиты электродвигателя обеспечивает выявление механических дефектов на ранней стадии их развития и не допускает обширных разрушений защищаемой электрической машины в аварийных ситуациях. Это позволяет значительно уменьшить производственный ущерб от отключения электродвигателя и снизить ремонтно-эксплуатационные затраты, так как для устранения незначительных дефектов, выявляемых предлагаемым способом и устройством, не требуется выполнения больших объемов ремонтных работ.
Формула изобретения
40
50
Способ защиты асинхронного электродвигателя от перегрузки, при котором измеряют ток фазььстатора электродвигателя, получают сигнал, пропорциональный квадрату этого тока, ис- 45 пользуя сигнал, пропорциональный квадрату тока фазы статора электродвигателя, определяют величину, характеризующую температуру электродвигателя, и при превышении ею критического значения формируют первый сигнал, информирующий о перегрузке электродвигателя, по которому электродвигатель отключают от сети, отличающийся тем, что, с целью повышения чувствительности защиты электродвигателя к перегрузкам, вызываемым механическими дефектами, дополнительно из тока статора выделяют все составляющие тока с частота55
ми, отличными от частоты источника питания, измеряют величину этих составляющих тока и при превышении этой величиной критического значения формируют второй сигнал, информирующий о перегрузке электродвигателя, вызванной механическими дефектами, и при появлении любого из упомянутых сигналов, информирующих о перегрузке, отключают электродвигатель .
Фиг. 2
Фиг.4
20 30 НО 50 60
Фиг.5
70 80 Гц
