е U,(t) мгновенное значение составляющей вектора кривой но оси Л;
Uy(i) мгновенное значение составляющей вектора кривой по оси У;
f/.. (0 - мгновенное значение составляющей компенсирующего вектора по оси X;
U,(t) мгновенное значение составляющей компенсирующего вектора по оси У.
При этом период составляющих компенсирующего вектора во много раз больще периода составляющих вектора кривой и временное растяжение составляющих вектора кривой не;1инейно.
Составляющие компенсирующего вектора создают с помощью следящей системы, в которой сравнивают одноименные составляющие вектора кривой и компенсирующего вектора и в зависимости от взаимного временного расположения опорных сигналов, которые генерируют в моменты равенства составляющей вектора кривой (безразлично какой) постоянному уровню, например нулевому, и сигналов, которые генерируют в моменты равенства одноименных составляющих компенсирующего и вектора кривой, поочередно управляют приращением составляющих компенсирующего вектора. Таким образом компенсирующий вектор с больщой точностью следит за вектором кривой по его траектории. При необходимости регистрации кривой как .4 цифровой форме, так и в аналоговой форме, выполняют управляемые источники составляющих компенсирующего вектора на основе реверсивного счетчика и преобразователя код-аналог. Если требуется регистрация только в аналоговой форме, то в качестве управляемых источников составляющих компенсирующего вектора используют для упрощения схемы управляемые генераторы линейно изменяющегося напряжения.
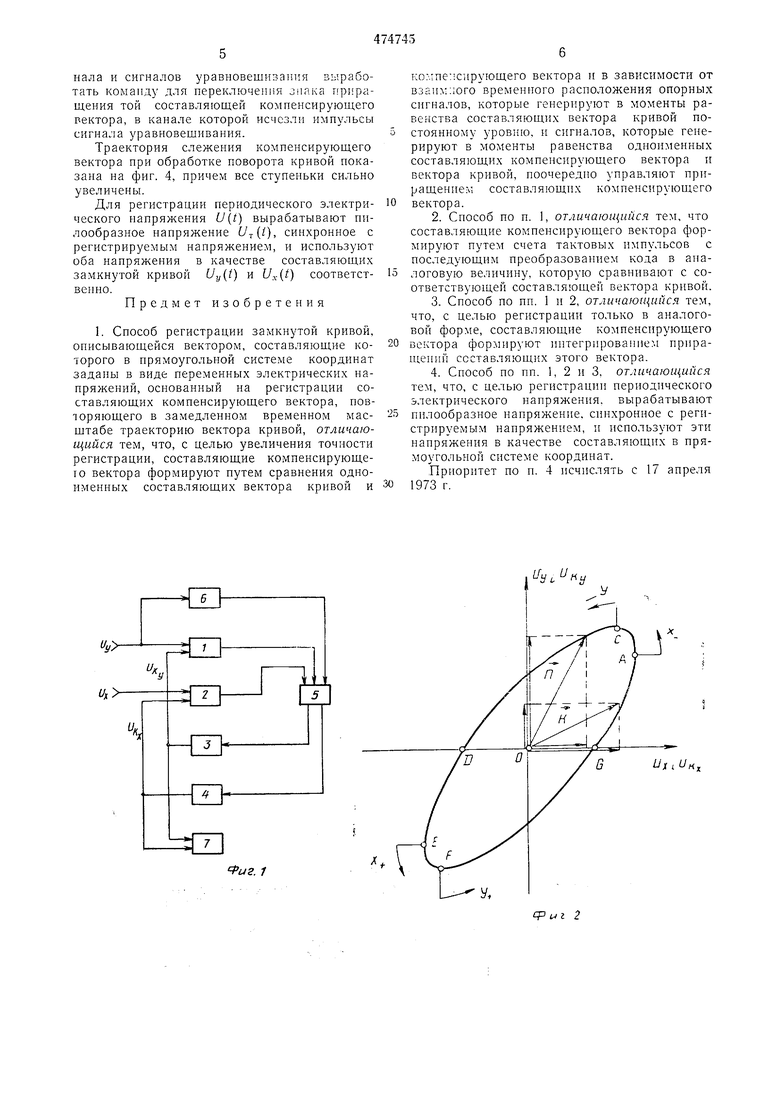
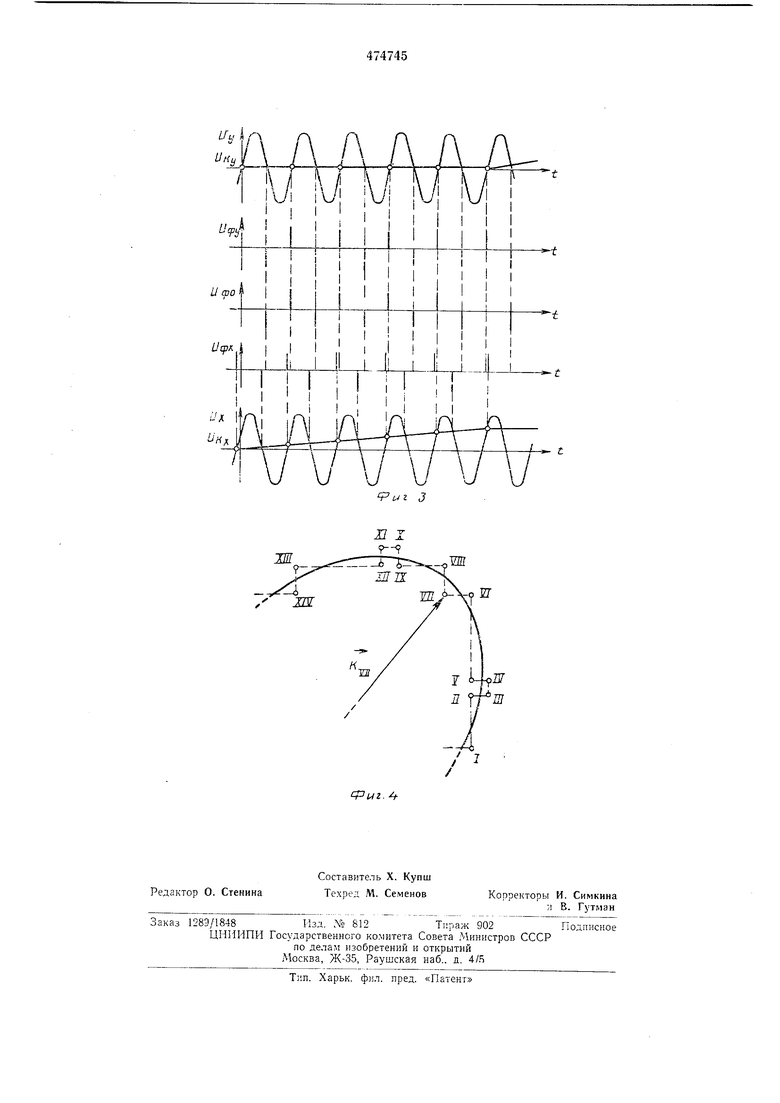
На фиг. 1 изображена обобщенная структурная схема для осуществления предлагаемого способа; на фиг. 2 - общий вид регистрируемой предлагаемым способом замкнутой кривой с вектором кривой и компенсирующим вектором; на фиг. 3 - временные диаграммы опорных сигналов, сигналов уравновешивания и формирования компенсирующего вектора; на фиг. 4 -. траектория слежения компенсирующего вектора.
Обобщенная структурная схема для осуществления предлагаемого способа содержит сравнивающие устройства 1 и 2, управляемые источники 3 и 4 компенсирующего напряжения, блок управления 5, к третьему входу которого подключен формирователь 6 опорного сигнала, регистрирующее устройство 7 соединено с выходами источников компенсирующего напряжения. При регистрации периодического электрического напряжения вход i/x подключен через управляемый генератор пилообразного напряжения к входу сигнала Uy.
Для нелинейного временного растяжения составляющих вектора кривой, которое представляет собой сущность предлагаемого способа для регистрации замк 1утой кривой, общий вид которой изображен на фиг. 2, составляющие вектора кривой сравниваются с одноименными составляющими компенсирующего вектора. В случае, когда конец компенсирующего вектора неподвижно находится на траектории вектора кривой, при каждом повороте вектора кривой происходит одновременное уравновещивание но обеим составляющим только в момент совпадения этих векторов (см. фиг, 2). Если, например, составляющая ty/Cj. (/) чуть меньще, чем указано на фиг. 2, тогда уравновещивание по этой составляющей наступает раньще уравновещивания по
составляющей U/f(t). Это опережение момента уравновещивания одной из составляющих вектора кривой по отнощению к моменту уравновешивания второй составляющей между двумя опорными импульсами, которые при
5 регистрации восходящей ветви кривой можно формировать в точке D, а при регистрации подающей ветви кривой - в точке G (см. фиг. 2), преобразуется в соответствующий сигнал, который поочередно управляет приращением составляющих компенсирующего вектора. В рассматриваемом случае под действием этого сигнала получает приращение составляющая .(t) до момента, когда уже уравновещивание составляющей U,j(t) опережает моменты уравновещивания составляющей Ux(t).
Если компенсирующнй вектор, исходя из начала координат, изменяется сначала только по составляющей Ь/с(/), тогда временные диаграммы сигналов уравновешивания канала 6фх и канала Убфу, которые формируют в моменты равенства одноименных составляющих компенсирующего вектора и вектора кривой, например, в виде игольчатых импульсов, и опорного сигнала принимают при переходе системы в режим слежения (на фиг. 2 в области точки G) вид, показанный на фиг. 3. Выбор сигналов уравновешивания, в данном случае выбор полярности
0 импульсов, из которых формируют сигнал для управления компенсирующего вектора и которые на фиг. 3 изображены сплощной линией, зависит от участка кривой, который в данный .момент регистрируется. Это поясняется на
5 фиг. 2 стрелками, где стрелка с обозначением X- говорит о том, что с момента А для управления используют из канала X отрицательные импульсы (нижний индекс). Другие обозначения расщифруются аналогично.
0 Когда становится одна из составляющих компенсирующего вектора больше .максимального значения одноименной составляющей вектора кривой, тогда исчезают импульсы сигнала уравновешивания в данном канале.
5 Это позволяет путем сравнения опорного сигнала и сигналов уравновешивания выработать команду для нереключеи11Я знака приращения той составляющей компенсирующего ректора, в канале которой исчезли имнульсы сигнала уравновещивания.
Траектория слежения компенсирующего вектора нри обработке поворота кривой показана на фиг. 4, причем все ступеньки сильно увеличены.
Для регистрании периодического электрического напряжения U(t) вырабатывают пилообразное напряжение Uf(i), синхронное с регистрируемым напряжением, и используют оба напряжения в качестве составляющих замкнутой кривой у(0 и /л-(О соответственно.
Предмет изобретения
1. Способ регистрации замкнутой кривой, описывающейся вектором, составляющие которого в прямоугольной системе координат заданы в виде переменных электрических напряжений, основанный на регистрации составляющих компенсирующего вектора, повторяющего в замедленном временном масщтабе траекторию вектора кривой, отличающийся тем, что, с целью увеличения точности регистрации, составляющие компенсирующего вектора формируют путем сравнения одноименных составляющих вектора кривой и
кол1пе: сирующего вектора н в зависимости от взаимного временного расположения опорных сигналов, которые генерируют в моменты равенства составляющих вектора кривой постоянному уровню, и сигналов, которые генерируют в моменты равенства одноименных составляющих компенсирующего вектора и вектора кривой, поочередно управляют приращением составляющих комненсирующего вектора.
2.Способ по п. 1, отличающийся тем, что составляющие компенсирующего вектора формируют путем счета тактовых пмпульсов с последующим преобразованием кода в аналоговую величину, которую сравнивают с соответствующей составляющей вектора кривой.
3.Способ по пп. 1 и 2, отличающийся тем, что, с целью регистрации только в аналоговой форме, составляющие компенсирующего вектора формпруют интегрированием приращений составляющих этого вектора.
4.Способ по пп. 1, 2 и 3, отличающийся тем, что, с целью регистрации периодического электрического напряжения, вырабатывают пилообразное напряжение, синхронное с регистрируемым напряжением, и используют эти напряжения в качестве составляющих в прямоугольной системе координат.
Приоритет по п. 4 исчислять с 17 апреля 1973 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения динамических петель гистерезиса ферромагнитных материалов | 1985 |
|
SU1264119A1 |
| Устройство для определения динамической петли перемагничивания ферромагнитных материалов | 1972 |
|
SU437990A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для измерения составляющих комплексного сопротивления (проводимости) двухполюсника | 1982 |
|
SU1118922A1 |
| Устройство для обратного тригонометри-чЕСКОгО пРЕОбРАзОВАНия | 1979 |
|
SU849239A1 |
| Способ определения динамических петель гистерезиса ферромагнитных материалов | 1986 |
|
SU1497596A1 |
| Детектор квазиравновесия | 1980 |
|
SU938163A1 |
| Устройство для измерения параметров комплексного двухполюсника | 1984 |
|
SU1242836A1 |
| Устройство для электроразведки | 1984 |
|
SU1239673A1 |
| Способ измерения амплитудных значений электрических сигналов | 1986 |
|
SU1509751A1 |
Uy
. 1
у.у
2
Lfy I
UK
I Ui iU lU W
I I
Vi
/./фЛ ,
V/ w у b
Ж
3-
/-
г J
ЕЙ
EZZ.- 2Г
Фиг.
