00
о l
«1
Изобретение относится к числовому программно1 гу управлению станками и предназначено для формирования сигна ла компенсаици систематических погрешностей положения и перемещения приводов станка, вызванных кинематическими погрешностями передач, несоосностью соединений и неравномерностью вращения двигателя
Целью изобретения является повышение точности коррекции.
На фиго представлена схема устройства для реализации предлагаемого способа; на фиг„2.- структурно-функ циональная схема узла компенсации гармоник; на фиг.З структурно-функциональная схема второго блока коррекции; на фиго4 - графики корректирующего сигнала, записанного в элемент памяти второго блока коррекции.
Устройство для реализации предлагаемого способа содержит следящий привод 1 подачи, состоящий из узла 2 сравнения, узла 3 суммирования, двигателя 4 и редуктора 5, исполнитель- ньм орган 6 станка, импульсный датчи 7 положения, кинематометр 8, анализатор 9 спектра, самописец 10, первый блок 11 коррекции, состоящий из узлов 12 компенсации гармоник, узел 13 индикации и второй блок 14 коррекции
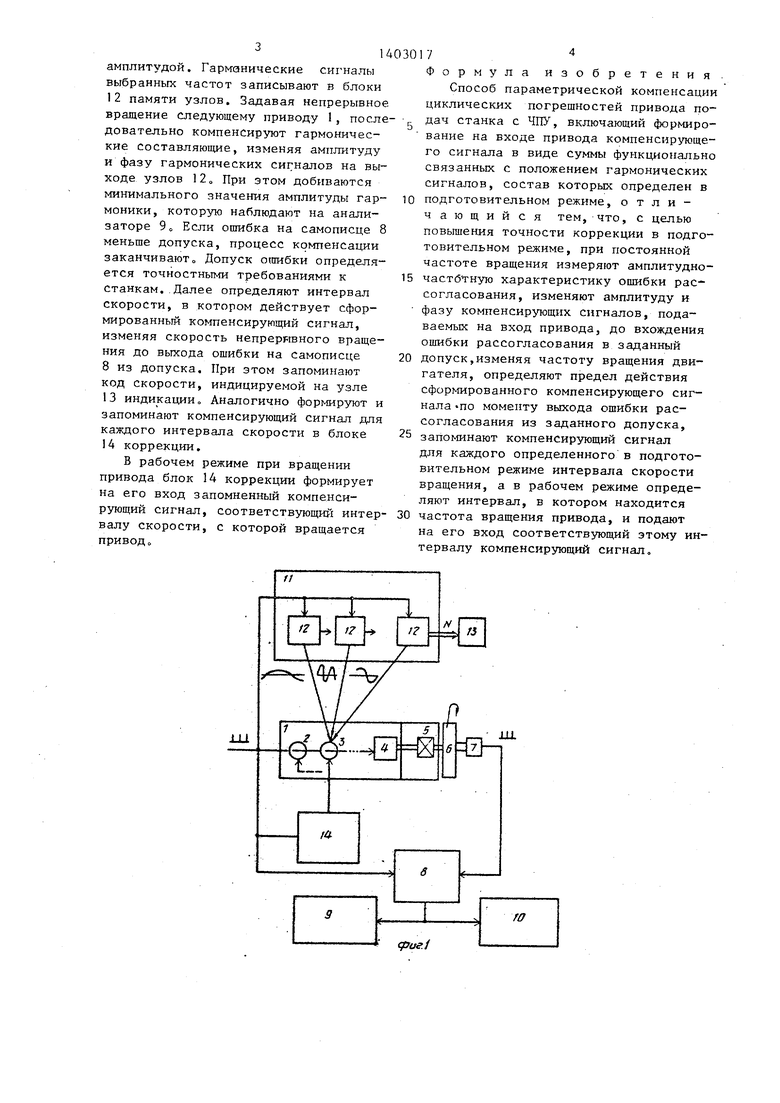
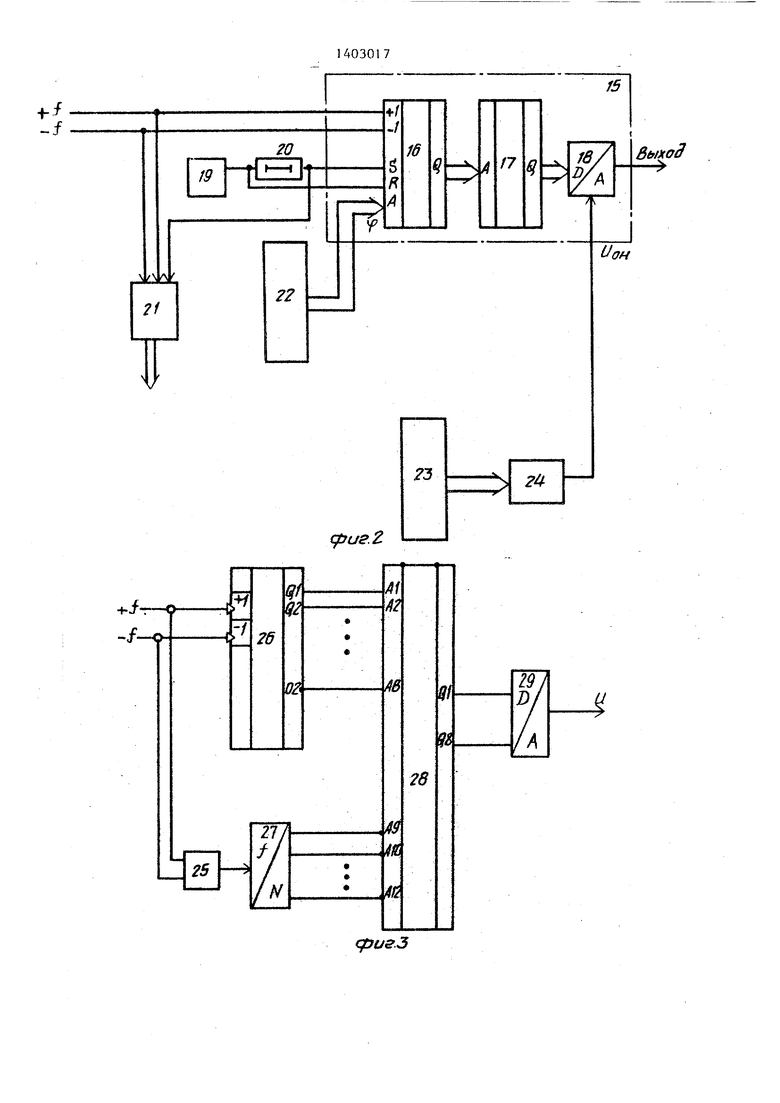
Узел компенсации гармоник содержи функциональный генератор 15 гармоник состоящий из счетчика 16 импульсов, элемента 17 памяти и дифроаналоговог преобразователя 18, датчик 19 нулевого положения, элемент 20 задержки, преобразователь 21 частота - код , кодовьш переключатель 22 фазы, кодо- вьй переключатель 23 модуля цифроана логовый преобразователь 24.
Второй блок 14 коррекции содержит элемент ИЛИ 25, счетчик 26 импульсов преобразователь 2 частота - код, мент 28 памяти и цифроаналоговый пре образователь 29о
На фиг.1 - 3 обозначены: N - кодовый выход первого блока 11 коррекции;- -f,-f - входы устройства; и - выход второго блока коррекции; Ugri вход опорного напряжения ЦАП 1
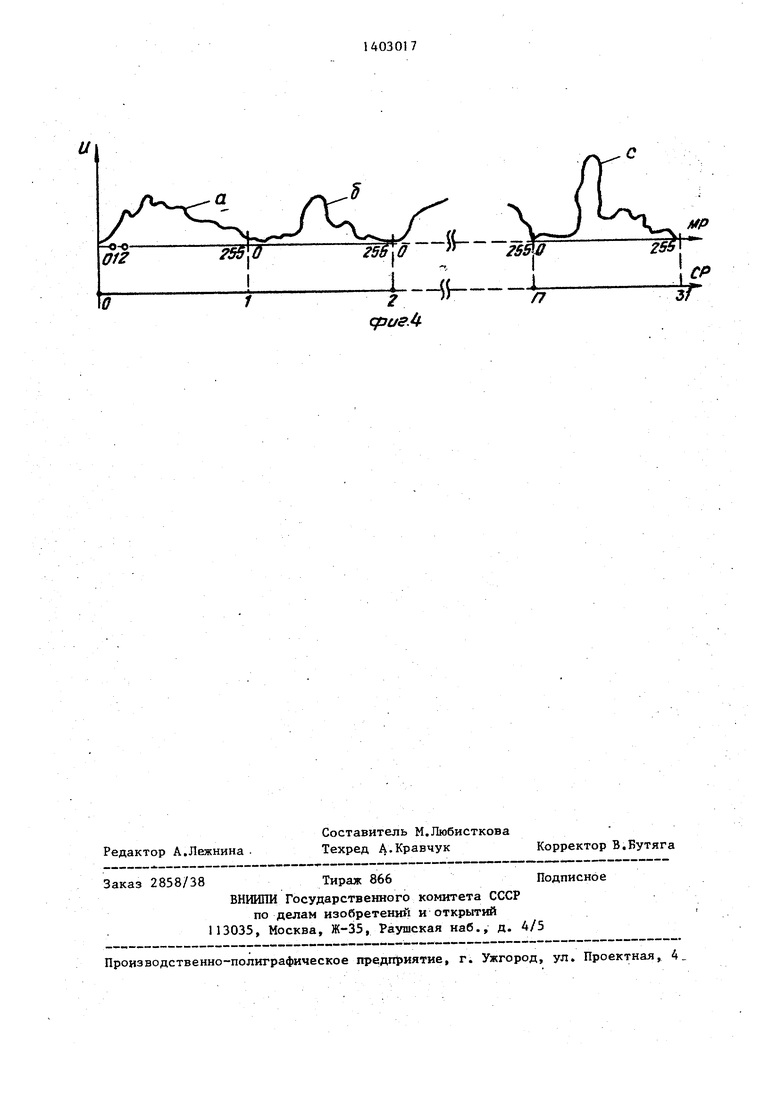
На графиках корректирующего сигнала (фиг.4,а,б,с), записанного в элементе памяти второго блока коррекции, изображены по оси младших разрядов (МР) значения младших разрядов А, ,0..,Ag адресной части, по оси
старших разрядов (СР) - значения
5
0
5
Q
5 до ти А,
0
старших разрядов Аа,.оо,А, элемента 28 памяти, а по оси U - числовые значения выходных кодов элемента 28 памяти
Узел компенсации гармоник работает следующим образом
По сигналу с датчика 19 нулевого положения счетчик 16 импульсов обнуляется и в него записывается код с кодового переключателя 22 фазы в виде фазового сдвига относительно нулевого положения Импульсы положения поступают на вход счетчика 16 импульсов, за йикл работы которого на выходе цифроаналогового преобразователя 18 по кодам элемента 17 памяти формируется период гармоники кинематической погрещностио Амплитуда гармоники задается кодовым переключателем 23 модуля о
Второй блок коррекции работает следующим образом
Перед работой в элемент 29 памяти записывается графики корректирующего сигнала для различньзх скоростей При
работе импульсы положения поступают . на входы счетчика 26 импульсов и преобразователя 27 частота - код При этом на выходе преобразователя 27 частота - код устанавливается код частоты вращения привода, который подается на старшие разряды AJJ, ... ,А .,2. элемента 28 памяти.Счетчик изменяет свое состояние от О
255,, При этом на выходе элемента 27 памяти значения изменяются .по одну из графиков а,б,с (фиг.4) в зависимости от кода старших разрядов памя.,А
ia
, от частоты вра5 до ти А,
5
0
5
щёния. Цифроаналоговый преобразователь 29 преобразует кодовые значения сигнала коррекции в напряжения.
Способ параметрической компенсации циклических погрешностей реализуют следующим образом,
В подготовительном режиме измеряют исходную погрешность привода При этом на вход следующего привода поступает последовательность импульсов постоянной частоты Кинеманометр 8 формирует на выходе сигнал ошибки в виде напряжения перемещения рабочего органа станка. Этот сигнал записывается на самописце 10. С помощью анализатора 9 спектра записывается спектральный состав ошибки перемещения, по KOTOpoiky выбирают компенсируемые составляющие (частоты) с наибольшей
амплитудой. Гармянические сигналы выбранных частот записывают в блоки
12памяти узлов. Задавая непрерывное вращение следующему приводу 1, после довательно компенсируют гармонические составляющие, изменяя амплитуду
и фазу гармонических сигналов на выходе узлов 12„ При этом добиваются минимального значения амплитуды гар- МОНИКИ, которую наблюдают на анализаторе 9 о Если ошибка на самописце 8 меньше допуска, процесс компенсации заканчивают Допуск опибки определяется точностными требованиями к станкам. Далее определяют интервал скорости, в котором действует сформированный компенсирующий сигнал, изменяя скорость непреривного вращения до выхода ошибки на самописце 8 из допуска. При этом запоминают код скорости, индицируемой на узле
13индикации„ Аналогично формируют и запоминают компенсирующий сигнал для каждого интервала скорости в блоке
14коррекции.
В рабочем режиме при вращении привода блок 14 коррекции формирует на его вход запомненный компенси- рзтощий сигнал, соответствующий интер- валу скорости, с которой вращается приводо
Формула изобретения
Способ параметрической компенсаци циклических погрешностей привода цо дач станка с ЧПУ, включающий формирование на входе привода компенсирующего сигнала в виде суммы функциональн связанных с положением гармонических сигналов, состав которых определен в подготовительном режиме, отличающийся тем, что, с цепью повьшения точности коррекции в подготовительном режиме, при постоянной частоте вращения измеряют амплитудно частб Тную характеристику ошибки рассогласования, изменяют амплитуду и фазу компенсирующих сигналов, подаваемых на вход привода, до вхождения ошибки рассогласования в заданный допуск,изменяя частоту вращения двигателя, определяют предел действия сформированного компенсирующего сигнала ПО моменту выхода ошибки рассогласования из заданного допуска, запоминают компенсирующий сигнал для каждого определенного в подготовительном режиме интервала скорости вращения, а в рабочем режиме определяют интервал, в котором находится частота вращения привода, и подают на его вход соответствующий этому интервалу компенсирующий сигнал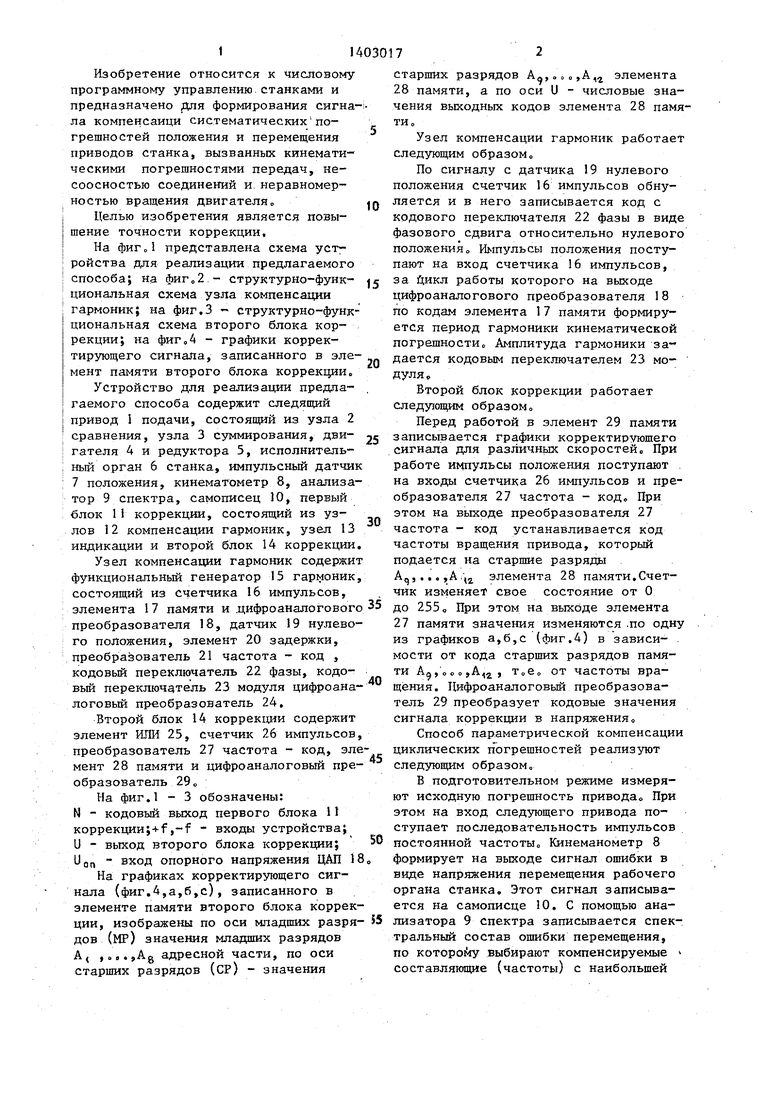
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции циклических ошибок | 1986 |
|
SU1359770A1 |
| Устройство для коррекции циклических ошибок | 1985 |
|
SU1293697A1 |
| УСТРОЙСТВО КОРРЕКЦИИ ОШИБКИ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА В КОД | 2020 |
|
RU2740511C1 |
| Режекторный фильтр | 1986 |
|
SU1417180A2 |
| Способ определения динамических петель гистерезиса ферромагнитных материалов | 1985 |
|
SU1264119A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ АКУСТИЧЕСКИХ ЛОКАЦИОННЫХ УРОВНЕМЕРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2129703C1 |
| Устройство для коррекции циклических ошибок | 1989 |
|
SU1714574A2 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| СЛЕДЯЩИЙ СИНУСНО-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД СО ВСТРОЕННОЙ ЦИФРОВОЙ КОРРЕКЦИЕЙ ОШИБКИ ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2741075C1 |
Изобретение относится к числовому программному управлению станками и предназначено для формирования сигнала компенсации систематических погрешностей положения и перемещения приводов станка, вызванных кинематическими погрешностями передач, несоосностью соединений, неравномерностью вращения двигателя. Цель изобретения - повьпиенне точности коррекции в подготовительном режиме. Способ параметрической компенсации циклических погрешностей привода подачи станка с ЧПУ включает формирование на входе привода компенсирующего сигнала в виде суммы функционально связанных с положением гармонических сигналов, состав которых определен в подготовительном режиме, в. котором при непрерьшном вращении измеряют величину и спектральный состав опгибки компенсации, изменяют амплитуду и фазу гармонических сигналов до вхождения этой ошибки в допуск, определяют интервал скоростей компенсирующего сигнала путем изменения скорости непрерывного решения до выхода ошибки из допуска и запоминают компенсирующий сигнал для каждого интервала скоростей В рабочем же режиме определяют интервал, в котором находится скорость вращения привода, и формируют на его входе соответствующий этому интервалу .запомненный компенсирующий сиг- чал 4 ил. с (Л
OIL
gffue.f
ВыхоЗ
дэие-З
и
-0-0
012
Г(
у Г
/
| СПОСОБ КОРРЕКЦИИ ПРОГРАММЫ | 0 |
|
SU296082A1 |
