В ОСНОВНОМ авт. св. № 108119 описан автопогрузчик для укладки ч штабель и разборки из него различного рода штучных грузов (мешко.в, кип и т. п.), предназначенный, в частности, для работы всудовых трюмах. Этот автопогрузчик включает в себя тележку, на которой смонтирзвана поворотная вокруг вертикальной оси коло нна с вращающейся и вертикальной плоскости телескопической раздвижной стрелой, несущей выполненное в виде клещей грузозахватное приспособление.
Недостатком таких автопогрузчиков является плохая их мапеврепность, в особенности при перемещении по уложенным в трюмах штабелям грузов.
В описываемом изобретении этот недостаток устранен тем, что автопогрузчик выполнен шагающим, для чего поворотная колонна его в нижней части выполнена в виде круглой опорной пяты, а рама автопогрузчика посредством вращающегося вала, несущего на своих концах по два ролика и щестерню, соединена с двумя связанными между собой поперечпыми балками-боковинами, расположенными с обеих ее Сторон и снаб.жепными четырехугольными направляющими пазами, в которых перекатываются расположенные на концах вала ролики, а шестерня перекатывается по нарезанным в направляющих пазах зубцам.
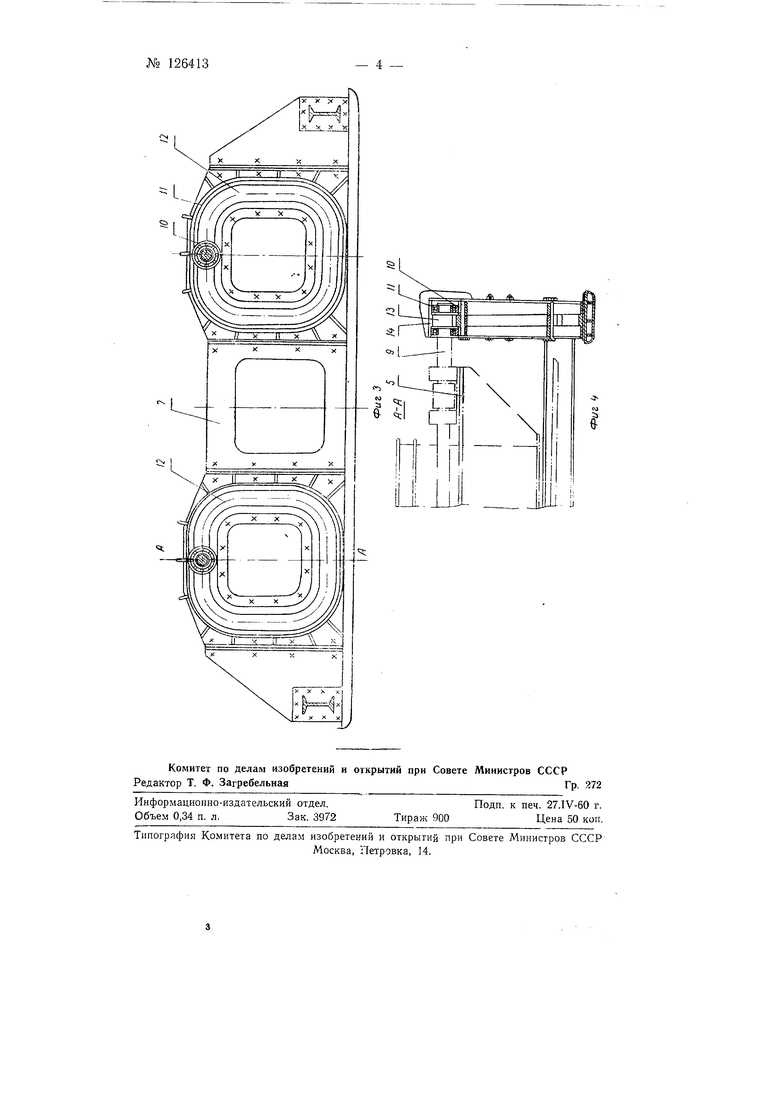
На фиг. 1 показана схема автопогрузчика при опирании его на грулт с помощью боковин; на фиг. 2 - то же, при опирании с помощью колонны (при поднятых боковинах); на фиг. 3 - устройство механизма шагания; на фиг. 4 - разрез по АА на фиг. 3.
Основными частями автопогрузчика являются верхнее строение и ходовая часть.
N° 126413Верхнее строение включает в себя выполненную по авт. св. № 108119 телескопическую стрелу J, несущую грузозахватное приспособление 2 и смонтированную на колонне 3. Колонна 3 снабжена уширенной круглой опорной пятой 4 и сочленяется с ра.мой 5 ходовой части посредством опорно-поворотного устройства 6.
Ходовая часть состоит из рамы 5, двух боковин 7, связанных поперечными балками и привода механизма передвижения, смонтированного на раме 5.
Механизм передвижения выполнен в виде электродвигателя 8, посредством зубчатых передач, приводящего во вращение валы 9. На конпы валов 9 насажены смонтированные на шарикоподшипниках ролики 10, перекатывающиеся по направляющим J1, предусмотренным на боковинах 7 прямоугольных направляющих пазов J2, и шестерни 13, находяпдиеся в зацеплении с нарезанными в направляющих пазах 12 зубцами 14.
Погрузчик оборудован также механизмом поворота. Токоподвод к приводным электродвигателям осуществляется с помощью гибкого кабеля 15. В рабочем положении (фиг. 1) колонна 3 поднята под опорной поверхностью и автопогрузчик опирается на боковины 7, причем валы 9 находятся в положении, показанном на фиг. 3 v( 4. При этом колонна 3 совместно со стрелой может с помощью механизма поворота разворачиваться относительно неподвижной ходовой части.
При в ключeнии электродвигателя 8 механизма передвижения, за счет вращения валов 9, шестерни 13 начинают перемещаться по неподвижнььм рейкам, образованным зубцами верхних горизонтальных участков направляющих пазов 12. При этом рама 5 совместно с колонной 3 и стрелой 1 также перемещается в горизонтальном направлении, нричем ее вес воспринимается роликами 10, перекатывающимися по направляющим 11. Одновременно с переходом шестерен 13 на закругленные угловые участки пазов 12 валы 9 совместно с рамой 5 начинают опускаться. Перемещаясь по вертикальным участкам пазов, рама 5 опускается до упора пяты 4 колонны 3 в грунт. После этого опускание рамы 5 прекращается и начинается подъем боковин 7 относительно лишенных возможноети поступательного перемещения шестерен 13 и валов 9. При этом опорные поверхности боковин 7 отрываются от грунта (фиг. 4), что при продолжении вращения щестерен 13 дает возможность боковинам 7 переместиться в горизонтальном направлении на длину горизонтальных участков пазов 12. Продолжая свое движение, боковины 7 в конце горизонтального хода начинают опускаться до упора в грунт, после чего происходит подъем и последующее церемещение в направлении движения рамы 5 и т. д.
Таким образом осуществляется щагающее движение с пепрерЕзШным циклом перемещения. Изменение направления движения осуществляется разворотом поднятой рамы 5 совместно с боковинами 7 относительно колонны 3.
Предмет изобретения
Автопогрузчик для укладки в штабель и разборки из него различных штучных грузов (мешков, кип и т. п.) по авт. св. № 108119, отличающийся тем, что, с целью преобразования автопогрузчика в шагающий, его поворотная колонна в нижней части выполнена в виде круглой опорной пяты, а рама автопогрузчика посредством вращающегося вала, несущего на своих концах но два ролика и шестерню, соединена
с расположенными с обеих ее сторон двумя связанными между собой поперечными балками-боковинами, снабженными четырехугольными направляющими пазами, в которых перекатываются расположенные на концах вала ролики, а шестерня перекатывается по нарезанным в направляющих пазах зубцам.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автопогрузчик для укладки в штабель и разборки из него различного рода штучных грузов (мешков, кип и т.п..) | 1957 |
|
SU108119A1 |
| Захватное устройство для грузов в мешках | 1958 |
|
SU123082A1 |
| Двухчелюстной грейфер для захвата затаренных в мешки материалов | 1958 |
|
SU123307A1 |
| Автопогрузчик | 1959 |
|
SU126794A1 |
| Винтовой пресс для вынимания сердечника из отловленного полого цилиндра | 1933 |
|
SU42407A1 |
| I БИ&ЛИСГГЕНААвторыБ. И. Левин и П. К. Мороз | 1973 |
|
SU381599A1 |
| Счетная машина | 1928 |
|
SU13284A1 |
| Подъемно-транспортирующее устройство для монтажных работ | 1977 |
|
SU863506A1 |
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
| Трюмная погрузочная машина | 1958 |
|
SU118325A1 |

V/ 7///////Y/7/W//Oy//7////////////////
Фиг I
5 ;5 % ;-; //////// /
Фиг. 2
