1
Изобретение относится к монтажнойтехнике и может быть использовано для монтажа и обслуживания (при эксплуатации) электрокоммуникаций, расположенных в промышленных зданиях и открытых площадках в зоне подкрановой балки, например троллей. Кроме того, может быть использовано и в других областях промьлиленности для выполнения различных видов работ: сантехнических, монтажа и обслуживания коммуникаций.
Известно подъемно-транспортирующее устройство для монтажных работ, содержащее подвижную от привода раму с горизонтальными и вертикальными ходовыми роликами, установленную на рельсы подкрановой балки, и подвесную раму с рабочей площадкой ИЗ
Однако известное устройство предусматривает выборочную установку либо грузоподъемного механизма, либо рабочей площадки. Для устройства характерны также ограниченность зоны монтажа в районе подкрановой балки: недостаточная маневренность по высоте, не позволяющая выполнять весь комплекс электромонтгикных работ.
Цель изобретения - повышение эффективности производства монтажных работ в зоне подкрановой бгшки.
Для достижения этой цели устройство снабжено смонтированной йа приводной раме поврротной стрелой с механизмом подъема груза, а подвесная рама выполнена Г-образной формы, на вертикальной части которой установ10лены с возможностью регулировки по высоте и длине опорные кронштейны, кгикдый из которых состоит из основной и откидывающейся ча9ти, при этом на последней шарнирно закреплен горизонтальный ролик, контактирующий с боковой поверхностью подкрановой балки.
Кроме того, с целью обеспечения свободного прохождения устройства в
20 зоне выступов подкрановой балки, устройство снабжено шарннрно закрепленным на откидаавакяцейся части опорного кронштейна трехплечим рычагом, взаимодействующим с микровыключателем при25вода передвижения рамы.
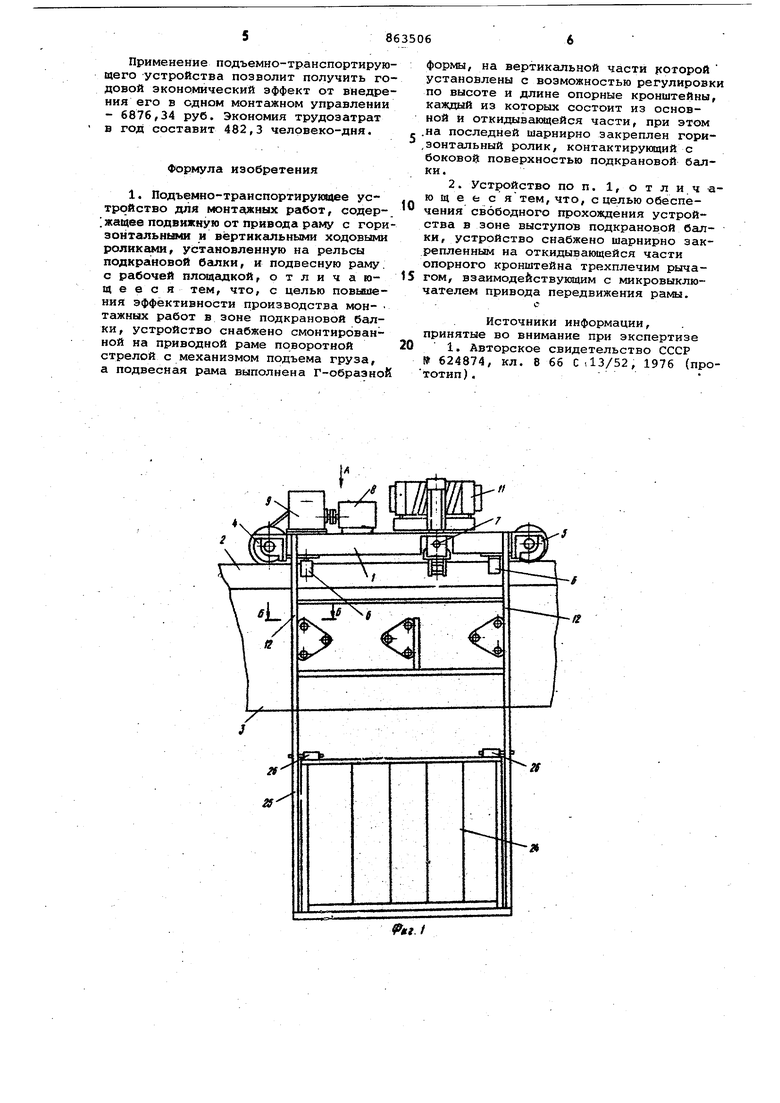
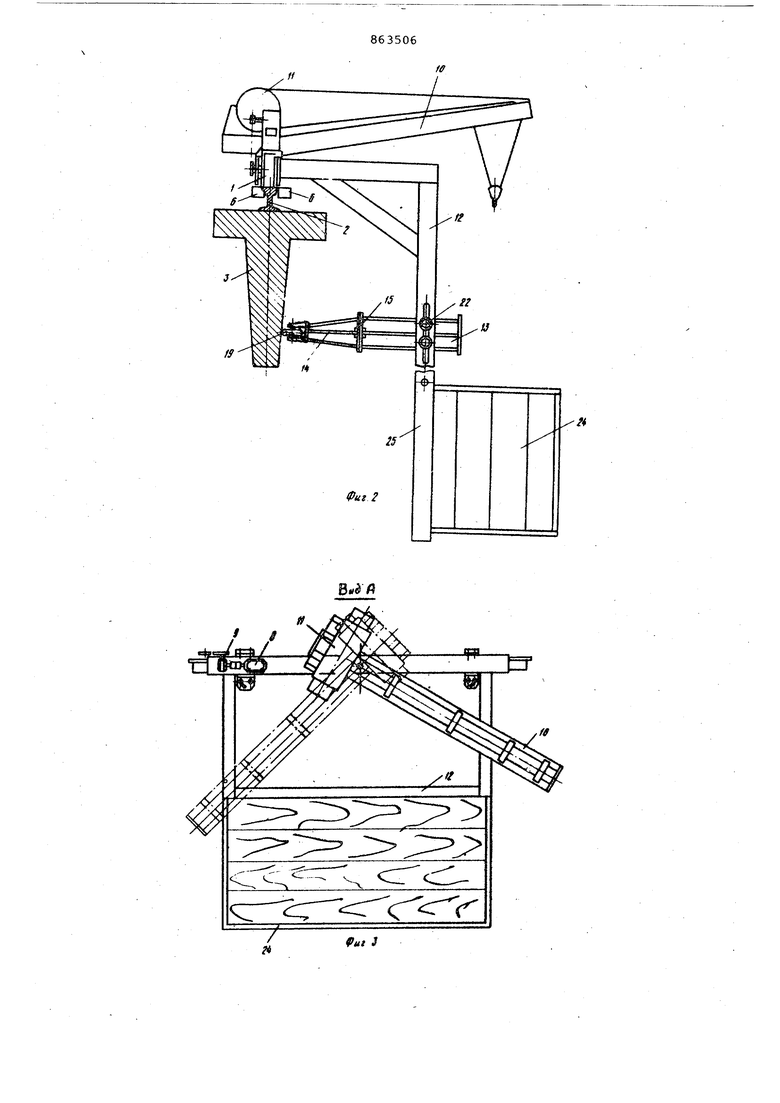
На фиг. 1 схематично изображено предлагаемое устройство, общий вид; на фиг. 2 - то же вид сбоку; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - опорный кронштейн с трехплечим рычагом и
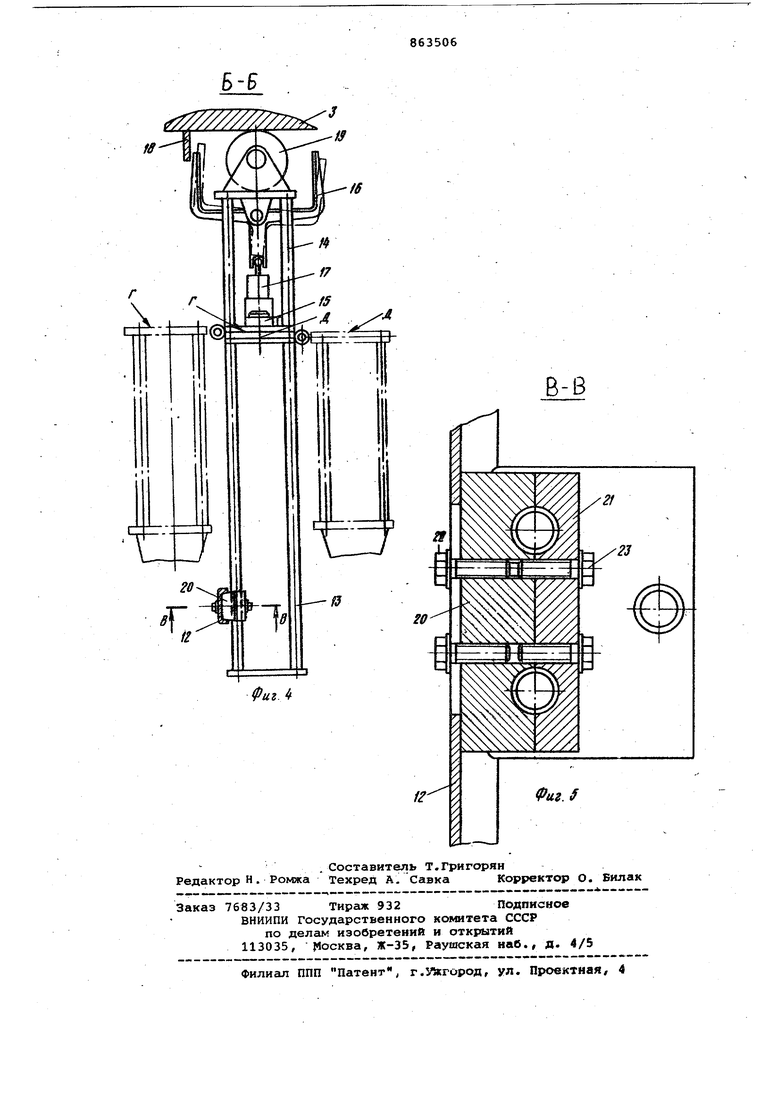
микровыключателем в исходном и откинутом состояниях (сечение Б-Б на фиг 1)J на фиг. 5 - крепление опорного кронштейна (сечение В-В на фиг. 4).
Подъемно-транспортирующее устройство содержит раму 1, установленную на рельс 2 подкрановой балки 3 с помощью горизонтальных ходовых роликов 4 и 5 и вертикальных ходовых роликов 6. Фиксирует ходовую раму в определенном месте и придает ей дополнителную устойчивость относительно рельса механизм зажима 7, например, состоящий из винта с правой и левой резьбой с навинчивающимися щеками, окнатывающими головку рельса при зажиме На раме установлен привод ее перемещения, состоящий из электродвигателя 8, редуктора 9, и горизонтальных ведущего 4 и ведомого 5 роликов, а также механизм подъема груза, состоящий из стрелы 10, поворачивающейся на 120° (см.фиг. 3) и электротельфера 11
На раме 1 смонтирована подвесная рама 12 Г-образной формы с установленными по длине и высоте опорными кронштейнами, каждый из которых состоит из 2-х частей: основной 13 и откидывающейся 14. Кронштейны снабжены механизмом откидывания в горизонтальной плоскости по плоскостям Г и Д и возврата в исходное положение и 3 амком 15.
На откидывающейся части 14 опорного кронштейна установлен трехплечий рычаг 16, связанный с микровыключателем 17, который отключает электрдвигатель 8 механизма перемещения при наталкивании трехплечевого рычаг га на ребро жесткости 18, а также установлен горизонтальный ролик 19, контактирующий с боковой поверхность подкрановой балки 3.
Основная часть опорного кронштейна снабжена регулирующим приспособлением, состоящим из планки 20, позволяющей регулировать установку опорного кронштейна по высоте, планки 21 позволяющей регулировать установку опорного кронштейна по .длине. Зажим планки 20 на подвесной 12 производится болтами 22, а зажим планки 21 к планке 20 производится болтами 23. о
На подвесной раме 12 установлена подвижная рабочая площадка (кабина) 24 с пультом управления (не показан) Подвесная рама выполнена с направляю щими 25, предназначенными для передвижения подвижной рабочей площадки 24 в вертикальной плоскости с фиксацией по высоте с помощью шпинггшетов 26.
Устройство работает следующим образом.
С помощью автокрана устройство устанавливается на рельс 2 подкрановой балки 3, причем на земле предварительно регулируется уровень установки подвижной рабочей площадки 24 и длина опорных кронштейнов в зависимости от типа подкрановой балки 3. Монтажник переходит в подвижную рабочую площадку 24.
J К пульту управления: подключается электроэнергия с помощью кабеля. Все устройство передвигается к месту выполнения работ и жестко фиксируется механизмом зажима 7 за головку рельса
д 2 для придания ему дополнительной устойчивости. Причем, с помощью механизма подъема груза, а именно стрелы 10 и электротельфера 11, на высоту доставляется длинномерный груз (тролеи, швеллера и т. д.), а небольшой груз
5 (кронштейны, уголки и т. д.) и ин струмент располагается на подвижной рабочей площадке 24. После подъема груза начинается выполнение электромонталсных работ, например, монтаж
0 тролеи. Периодическое перемещение устройства вдоль подкрановой балки 3 и доставка груза в процессе выполнения монтажных работ осуществляется , монтажником с пульта управления подвижной рабочей площадки 24.
При передвижении устройства, для того,, чтобы опорный кронштейн мог перешагнуть выступ или уклон на боковой поверхности подкрановой балки: 3/
- часть кронштейна 14, контактирующая с поверхностью балки 3, может откидываться монтажником с рабочей площадки 24 в горизонтальной плоскости по плоскостям г и Д в зависимости от направления движения устройства,
затем возвращается тем же способом в исходное( рабочее) положение и фиксируется замком 15.
В случае недосмотра монтажника для предотвращения столкновения опорного
0 К13онштейна С ребром жесткости или технологическим уголком, срабатывает блокировка, выполненная в виде трехплечевого рычага 16, связанного с микровыключателем 17, отключающим
г привод перемещения всего устройства. Блокирующее устройство установлено на откидывающейся части 14 кронштейна.
При полном окончании монтажных раЛf бот устройство снимается с рельса краном и складывается в транспортное положение.
Основными преимуществами подъемнотранспортирукядего устройства являются
5 возможность выполнения электромонтгикных работ в любой точке подкрановой балки, большая зона действия (маневренность); совмещенный подъем груза и монтажа на высоту выполнения
работ с помощью только одного устройства; в процессе выполнения электромонтажных работ высвобождение оборудования (автопогрузчиков, подмостей, кранов) , важно для осуществ ления других видов работ. Применение подъемно-транспортирую щего устройства позволит получить го довой экономический эффект от внедре ния его в одном монтажном управлении - 6876,34 руб. Экономия трудозатрат в год составит 482,3 человеко-дня. Формула изобретения 1. Подъемно-транспортирующее устройство для монта жных работ, содер;жацее подвижную от привода раму с гори зонтальнш 1и и вертикальными ходовыми роликами, установленную на рельсы подкрановой балки, и подвесную раму. с рабочей площадкой, отличающееся тем, что, с целью повьааения эффективности производства мон- тажных работ в зоне подкрановой балки, устройство снабжено смонтированной на приводной раме поворотной стрелой с механизмом подъема груза, а подвесная рама выполнена г-образноК формы, на вертикальной части |{оторой установлены с возможностью регулировки по высоте и длине опорные кронштейны, каждый из которых состоит из основной и откидывающейся части, при этом .на последней шарнирно закреплен гори,зонтальный ролик, контактиругаций с боковой поверхностью подкрановой балки. 2. Устройство по п. 1, о т л и ч аю щ е fe с я тем, что, с целью обеспечения свободного прохождения устройства в зоне выступов подкрановой бал- ки, устройство снабжено шарнирно закрепленным на откидывающейся части опорного кронштейна трехплечим рычагом, взаимодействующим с микровыключателем привода передвижения рамы. с Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 624874, кл. 6 66 Cil3/52, 1976 (прототип).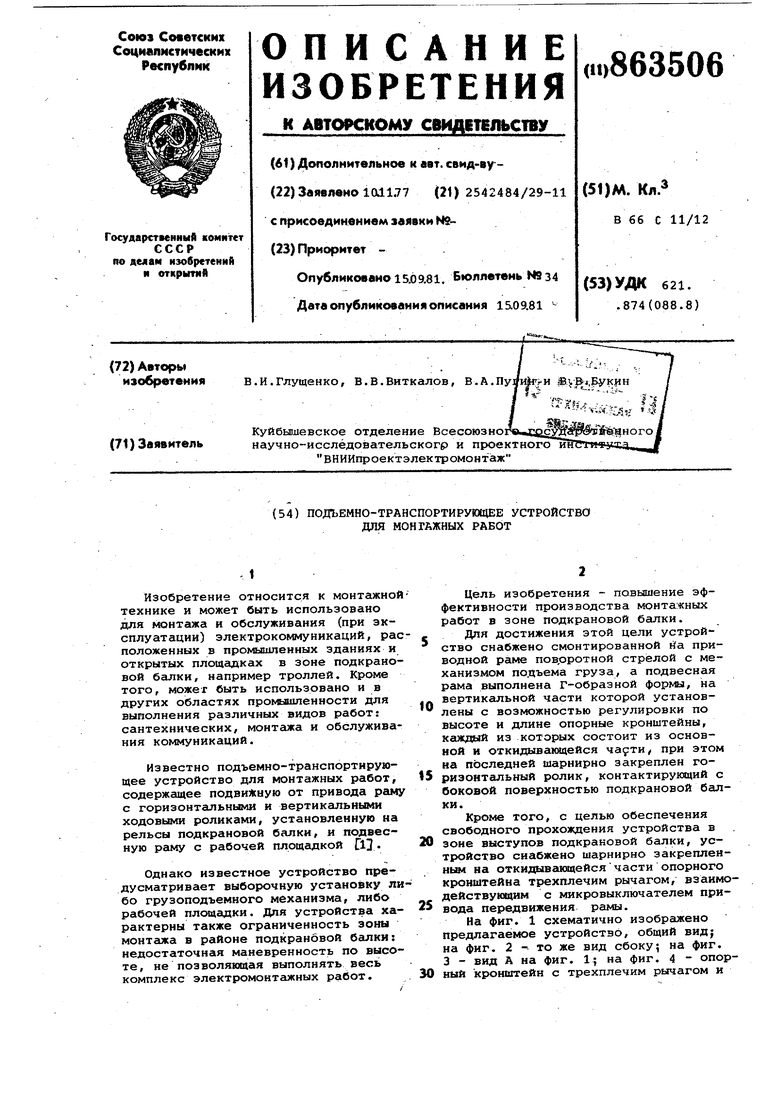

| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-транспортирующее устройство для монтажных работ | 1980 |
|
SU962182A2 |
| Подъемно-транспортирующее устройство для монтажных работ | 1984 |
|
SU1203007A2 |
| Подъемно-транспортирующее устройство для монтажных работ | 1981 |
|
SU1006361A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| МОСТОВОЙ РОЛИКООПОРНЫЙ КРАН МАМЫРИНА ДЛЯ КОНТЕЙНЕРНЫХ ПЛОЩАДОК И СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРОПЛАНТАЦИЙ | 1992 |
|
RU2020122C1 |
| Башенный кран | 1984 |
|
SU1248942A1 |
| Монтажное устройство | 1980 |
|
SU925856A1 |
| ПОДВЕСНОЙ КОНСОЛЬНО-КОЗЛОВОЙ КРАН | 1966 |
|
SU181794A1 |
| Строительно-монтажный самоподъемный самоходный кран | 1951 |
|
SU94368A1 |
| Система для монтажа мостового крана | 1990 |
|
SU1752715A1 |
х1
