Изобретение относится к электротехнике, в частности к частотно-управляемым электроприводам, и может быть использовано в различных отраслях промышленности: химической, нефтедобывающей, атомной энергетике, в коммунальном хозяйстве, в мелиорации и в других отраслях-для регулирования производительности насосных и компрессорных установок.
Целью предложенного способа является уменьшение электрических потерь в электроприводе с вентиляторным моментом статического сопротивления.
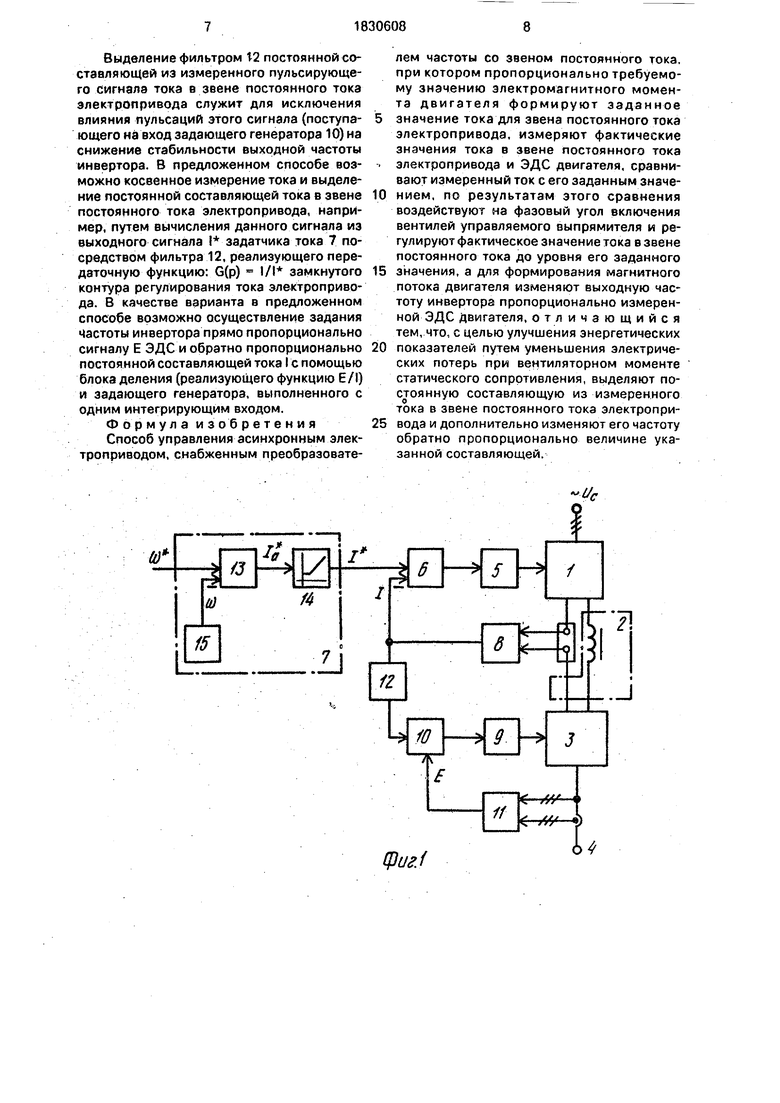
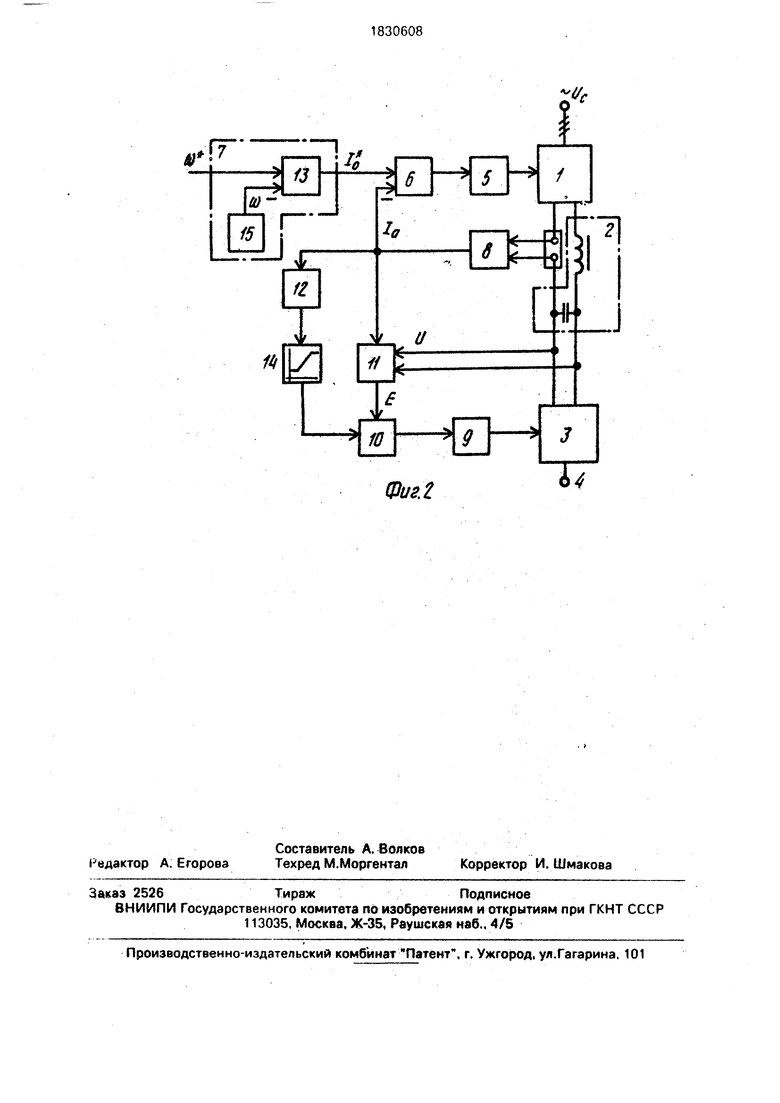
На фиг. 1 - блок-схема примера реализации способа в электроприводе с автономным инвертором тока: на фиг. 2 - блок-схема примера реализации способа в электроприводе с автономным инвертором напряжения.;
Предложенный способ охватывает варианты его реализации в электроприводах с автономными инверторами тока и напряжения. На фиг. 1 приведена блок ч,хемя примера реализации способа в электроприводе с автономным инвертором тока, содержащем управляемый выпрямитель 1, силовой фильтр 2, автономный инвертор тока 3 и клеммы для подключения статорных обмоток асинхронного двигателя 4, последовательно соединенные между собой, систему управления выпрямителей 5, соединенную своим входом с выходом регулятора тока 6, первый вход которого подключен к выходу задатчика тока 7, а второй вход - к выходу датчика тока 8 в звене постоянного тока электропривода, систему управления инвертором 9, соединенную своим входом с выходом задающего генератора 10, первый вход которого подключен к выходу датчика ЭДС 11 двигателя, а второй вход - связан через фильтр 12 с выходом датчика тока 8, задатчиктока 7 выполнен в виде последовательно соединенных регулятора частоты 13 и усилителя-ограничителя 14. примем один из входов регулятора частоты 13 подключен к выходу датчика частоты (скорости) 15. а
fe
00
со
о
te
00
второй вход регулятора частоты 13 и выход усилителя-ограничителя 14 являются, соответственно, входом и выходом задатчика тока 7. ... -.
На фиг. 2 приведена блок-схема примера реализации способа в электроприводе с автономным инвертором напряжения, содержащем управляемый выпрямитель 1, силовой фильтр 2, автономный инвертор напряжения 3 и клеммы для подключения статорных обмоток асинхронного двигателя 4, последовательно соединенные между собой, систему управления выпрямителем 5, соединенную своим входом с выходом регулятора тока 6, первый вход которого подключен к выходу задатчика тока 7, а второй вход - к выходу датчика тока 8 в звене постоянного тока электропривода,систему управления инвертором 9, соединенную .своим входом с выходом задающего генератора 10, первый вход которого подключен к выходу датчика ЭДС 11 двигателя, а второй вход связан через последовательно соединенные усилитель-ограничитель 14 и фильтр 12с выходом датчика тока 8, задатчик тока 7 выполнен в виде регулятора частоты 13, соединенного одним из входов с выходом датчика частоты (скорости) 15, причем второй вход и выход регулятора частоты 13 являются, соответственно, входом и выходом задатчика тока 7.
Предложенный способ на примере блок-схемы электропривода с автономным инвертором тока (см.фиг.I) функционирует следующим образом: регулятор частоты 13, сравнивая на входе сигнал задания на частоту (скорость) со с сигналом отрицательной обратной связи по частоте (скорости) О), поступающим с выхода датчика частоты (скорости) 15, формирует на своем выходе сиг- нзл задания активной составляющей la статорного тока (пропорциональной заданной значению / электромагнитного момента двигателя). С учетом существующей для экономичного закона управления асинхронным двигателем пропорциональности активной la, намагничивающей ь и модуля I статорного тока двигателя, усилитель-ограничитель 14 формирует на выходе сигнал задания I модуля статорного тока:
l рн, (1)
где рн - угол в номинальном режиме между векторами ЭДС двигателя и статорного тока двигателя.
Таким образом, на выходе задатчика тока 7 формируется пропорционально требуемому значению электромагнитного момента двигателя сигнал заданного значения тока для звена постоянного тока электропривода. Посредством датчика тока 8 измеряется фактическое значение тока I в звене
постоянного тока электропривода, а с помощью датчика ЭДС 11 - фактическое значение модуля Е ЭДС двигателя. На входах регулятора тока 6 сравниваются измеренный сигнал тока с сигналом I его заданного значения, регулятор тока 6 посредством воздействия на фазовый угол включения вентилей управляемого выпрямителя 1 регулирует фактическое значение тока I в звене постоянного тока до уровня его заданного
значения . Посредством фильтра 12 выделяют сигнал постоянной составляющей из измеренного пульсирующего сигнала тока I в звене постоянного тока электропривода, поступающий на второй (опорный) вход задающего генератора 10, на первый вход (интегрирующий) которого поступает сигнал Е ЭДС с выхода датчика ЭДС 11. При этом магнитный поток двигателя формируется путем задания выходной частоты f инвертора 3 (с выхода задающего генератора 10 через систему управления инвертором 9) пропорционально измеренному сигналу Е ЭДС двигателя и обратно пропорционально величине аыделенного сигнала постоянной составляющей тока:
-т-«
(2)
где TH, Ем, IH - номинальные значения частоты, ЭДС и статорного тока двигателя, соответственно.
Такое задание магнитного потока Ф двигателя (в прямой линейной функции от
модуля статорного тока
Ф-f urf
ТIK
(3)
где Фн ЕН/ТН- номинальное значение магнитного потока двигателя), означает реализацию в электроприводе экономичного закона управления (по минимуму электрических по терь в двигателе).
При этом, при изменении момента статической нагрузи на валу двигателя, взаимосвязанно пропорционально изменяются модуль статорного тока Ги магнитный лоток Ф двигателя, а коэффициент мощности cos p остается неизменным, равным номинальному значению:
COS (ft COS $0H COnst.
(4)
Для электропривода с вентиляторным моментом статического сопротивления величина выходного токоограничения в двигательном режиме () задается амплитудой установки ограничения положительной полярности выходного сигнала регулятора частоты 13 (на уровне 1амакс /соз рн), При наличии начального пускового момента статического сопротивления, выходной ток двигателя при пуске устанавливается на уровне токоограничения, двигатель преодолевает начальный момент сопротивления и разгоняется с номинальным и выше значением t-.агнитного потока (обладая высокой перегрузочной способностью по моменту). В тормозном режиме работы () регулятор частоты 13 формирует на своем выходе нулевой сигнал (la 0), а усилитель-ограничитель 14 формирует на своем выходе при этом номинальный сигнал задания статор- ного тока мин (определенный из условия безаварийной токовой коммутации в автономном инверторе тока 3); двигатель привода при минимальном токе с ослабленным магнитным потоком ( - Фи ) тормозится под воздействием момента статического сопротивления на валу рабочего механизма (насоса, компрессора).
Предложенный способ на примере блок-схемы электропривода с автономным инвертором напряжения (см.фиг.2) функционирует следующим образом: регулятор частоты 13 сравнивает на своем входе сигнал задания на частоту (скорость) ш и сигнал отрицательной обратной связи по частоте (скорости) ш, поступающий с выхода датчика частоты (скорости) 15, и формирует на своем выходе сигнал задания активной составляющей. 1а статорного тока. Таким образом, на выходе задатчика тока 7 формируется пропорциональный требуемому значению /л лектромэгнитного момента двигателя сигнал la заданного значения тока для звена постоянного тока электропривода. Посредством датчика тока 8 измеряется фактическое значение тока 1а (для электропривода с автономным инвертором напряжения в статическом режиме U Id, где la ток на выходе управляемого, выпрямителя в звене постоянного тока электропривода), а с помощью датчика ЭДС 11 - фактическое (приближенно через параметры звена постоянного тока) значение модуля Е ЭДС двигателя. На входах регулятора тока 6 сравниваются измеренный сигнал тока 1а с сигналом 1а его заданного значения, регулятор ток.ч 6 посредством воздействия на фазовый угол включения
вентилей управляемого выпрямителя 1 регулирует фактическое значение тока la а звене постоянного тока до уровня его заданного значения 1а. Посредством фильтра 12 выде- 5 ляютсигнал постоянной составляющей из измеренного пульсирующего сигнала тока U в звене постоянного тока электропривода, поступающий через усилитель-ограничитель 14 на второй (опорный) вход задающего гене0 ратора ТО, на первый вход (интегрирующий) которого поступает сигнал Е ЭДС с выхода датчика ЭДС 11. Магнитный поток двигателя формируется путем задания выходной частоты f инвертора 3 пропорционально из5 меренному сигналу Е ЭДС двигателя и обратно пропорционально величине сигнала la постоянной составляющей тока согласно выражения (2). что означает реализацию в электроприводе экономического закона уп0 равления по формулам (3) и (4).
Для электропривода с вентиляторным моментом статического сопротивления величина выходного токоограничения в двига- тельном режиме () задается
5 амплитудой уставки ограничения выходного сигнала положительной полярности регулятора частоты 13 (на уровне 13макс /соз рн). При наличии начального пускового момента статического сопротивления, выходной ток
0 двигателя устанавливается при пуске на уровне токоограничения, двигатель преодолевает начальный момент сопротивления и разгоняется с номинальным значением магнитного потока (обладая высокой перегру5 зочной способностью по моменту). Усилитель-ограничитель 14 формирует выходной сигнал, равный (la/cos рн, с уставкой нижнего ограничения на уровне 1Мин и с уставкой верхнего ограничения на уровне
0 |н (верхнее ограничение усилителя 14 обеспечивает при разгоне привода на токоогра- ничении ограничение максимального значения магнитного потока на уровне номинального значения Фн). В тормозном ре5 жиме работы () регулятор частоты 13 формирует на своем выходе нулевой сигнал (la 0), нереверсивный выпрямитель 1 закрывается, а усилитель-ограничитель 14 формирует на своем выходе сигнал уставки
0 нижнего ограничения 1Мин, обеспечивающий нижнее ограничение ослабления магнитного потока двигателя при торможении на уровне Фмм Ф н , двигатель привода тормозится с ослабленным потоком и
5 нулевой активной составляющей тока под воздействием момента статического сопротивления на валу рабочего механизма (насоса, компрессора).
Выделение фильтром 1 постоянной составляющей из измеренного пульсирующего сигнала тока в звене постоянного тока электропривода служит для исключения влияния пульсаций этого сигнала (поступающего на вход задающего генератора 10) на снижение стабильности выходной частоты инвертора. В предложенном способе возможно косвенное измерение тока и выделение постоянной составляющей тока в звене постоянного тока электропривода, например, путем вычисления данного сигнала из выходного сигнала I задатчика тока 7 посредством фильтра 12, реализующего передаточную функцию: G(p) I/I замкнутого контура регулирования тока электропривода. В качестве варианта в предложенном способе возможно осуществление задания частоты инвертора прямо пропорционально сигналу Е ЭДС и обратно пропорционально постоянной составляющей тока I с помощью блока деления (реализующего функцию E/I) и задающего генератора, выполненного с одним интегрирующим входом. Ф о р м у л а и з о б р е т е н и я Способ управления асинхронным электроприводом, снабженным преобразователем частоты со звеном постоянного тока, при котором пропорционально требуемому значению электромагнитного момента двигателя формируют заданное
значение тока для звена постоянного тока электропривода, измеряют фактические значения тока в звене постоянного тока электропривода и ЭДС двигателя, сравнивают измеренный ток с его заданным значением, по результатам этого сравнения воздействуют на фазовый угол включения вентилей управляемого выпрямителя и регулируют фактическое значение тока в звене постоянного тока до уровня его заданного
значения, а для формирования магнитного потока двигателя изменяют выходную частоту инвертора пропорционально измеренной ЭДС двигателя, отличающийся тем, что, с целью улучшения энергетических
показателей путем уменьшения электрических потерь при вентиляторном моменте статического сопротивления, выделяют постоянную составляющую из измеренного тока в звене постоянного тока электропривода и дополнительно изменяют его частоту обратно пропорционально величине указанной составляющей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1986 |
|
SU1372580A1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1829102A1 |
| Устройство для управления асинхронным электроприводом | 1990 |
|
SU1830609A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1246321A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Способ двухзонного управления частотно-регулируемым электроприводом и устройство для его осуществления | 1989 |
|
SU1676059A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| Частотно-регулируемый электропривод | 1984 |
|
SU1274109A1 |
Использование: для регулирования насосных и компрессорных установок. Сущность изобретения: выделяют постоянную составляющую из измеренного тока в звене постоянного тока и дополнительно изменяют его выходную частоту обратно пропорци- онально указанной составляющей. Электропривод, реализующий способ, содержит датчик тока, подключенный через фильтр к одному входу задающего генератора, другой вход которого соединен с выходом датчика ЭДС. При этом достигается экономия потребляемой электроэнергии при вентиляторном моменте статического сопротивления. 2 ил,
(Ptl&f
4
Фиг
47
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМЙАТЕКТ;10~ТГХН^г;г-к^^ч | 0 |
|
SU352358A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
