Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов и в других механизмах, в которых соединяемые звенья совершают относительное пространственное движение. Цель изобретения - обеспечение экономии электроэнергии и повышение точности позиционирования путем выполнения привода с торцовым асинхронным двигателем, снабженным фиксатором ротора, что позволяет отключать электроэнергию при фиксированном положении звеньев. На чертеже изображен сустав манипулятора, обш,ий вид. „ Сустав манипулятора содержит две установленные на оси 1 части 2 и 3, одна из которых 2 установлена на оси 1 с возможностью поворота, а другая 3 жестко с ней связана, привод их относительного поворота, включаюш.ий торцовый асинхронный электродвигатель, статор 4 которого выполнен кольцевым и закреплен на части 2 сустава, а ротор 5 установлен на оси 1 с возможностью враш,ения, и волновую передачу, состоящую из расположенных соосно и находящихся в зацеплении гибкого зубчатого колеса 6 и жесткого зубчатого колеса 7, зубцы которых расположены на обращенных друг к другу торцовых поверхностях, при этом жесткое зубчатое колесо 7 закреплено на части 2 сустава, а гибкое 6 - на оси 1. Кроме того, сустав снабжен фиксатором положения ротора 5, включающим аксиально расположенную внутри статора 4 и подпружиненную к нему пружиной 8 втулку 9 из магнитопроводного материала, а между торцом ротора 5 и торцом гибкого зубчатого колеса 6 установлен подшипник 10 качения. Сустав манипулятора работает следующим образом. При подаче напряжения на статор 4 возникает сила тяги, под действием которой втулки 9, преодолевая сопротивление пружины 8, растормаживают ротор 5. Одновременно при взаимодействии вращающегося магнитного поля статора 4 с наведенным током, в обмотке ротора 5 возникает вращающий момент, под действием которого ротор 5 начинает вращаться, вращая и зоны зацепления гибкого зубчатого колеса 6 с жестким колесом. 7. При этом за счет разности зубьев зубчатых венцов гибкого 6 и жесткого 7 колес гибкое колесо 6 поворачивается относительно жесткого 7, поворачивая и ось 1 с частью 3 сустава. При снятии напряжения со статора 4 втулка 9 под действием пружины 8 затормаживает ротор 5, тем самым фиксируя в пространстве положение части 3 относительно части 2 сустава. Формула изобретения Электромеханический сустав манипулятора, содержащий две установленные на оси корпусные части, одна из которых установлена на оси с возможностью поворота, а другая - жестко с ней связана, и привод их относительного поворота, включающий волновую передачу с расположенными соосно и находящимися в зацеплении жестким и гибким зубчатыми колесами, отличающийся тем, что, с целью обеспечения экономии электроэнергии и повышения точности позиционирования, он снабжен торцовым асинхронным электродвигателем, статор которого выполнен кольцевым и закреплен на одной корпусной части, а ротор установлен на оси сустава с возможностью вращения, фиксатором положения ротора, выполненным в виде аксиально расположенной внутри статора и подпружиненной к нему втулки из магнитопроводного материала, и подшипником качения, установленным между торцами ротора и гибкого зубчатого колеса, при этом зубья гибкого и жесткого колес расположены на обращенных друг к другу торцовых поверхностях, и кроме того, жесткое зубчатое колесо закреплено на одной корпусной части, а гибкое закреплено на оси.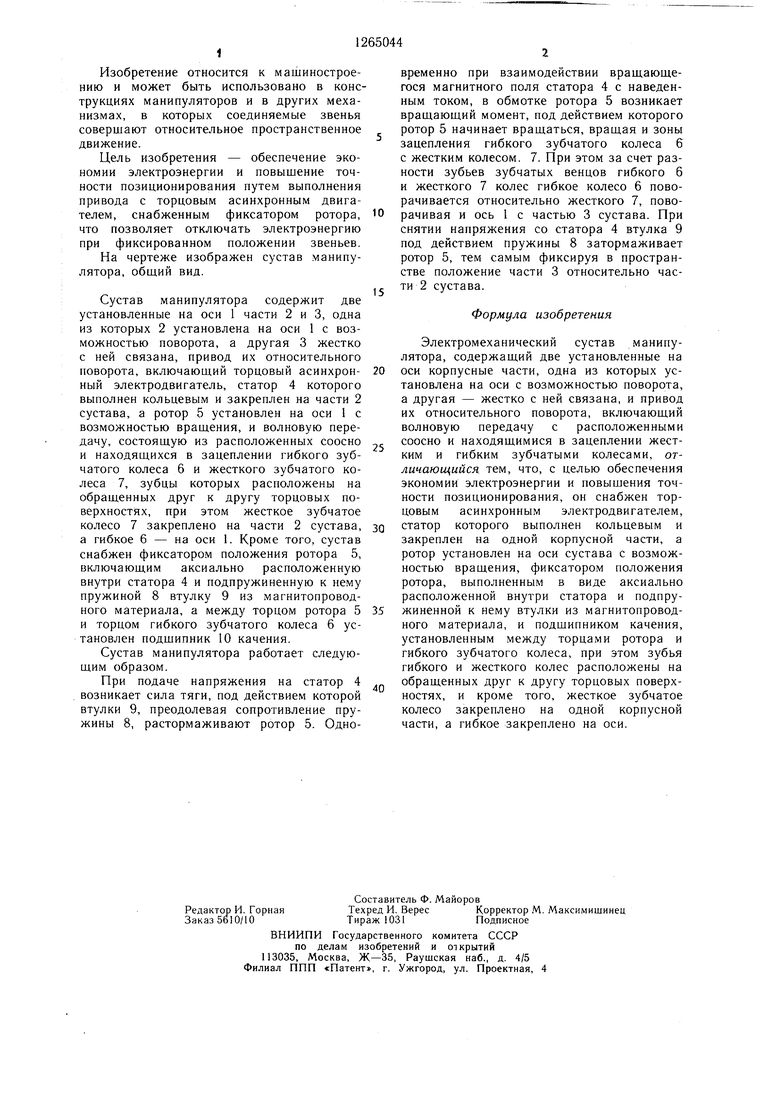
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический сустав манипулятора | 1980 |
|
SU975396A1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| Двухступенчатый конический волновой редуктор с электродвигателем | 2021 |
|
RU2771554C1 |
| ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ | 2019 |
|
RU2720887C1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1135643A1 |
| МАЯТНИКОВЫЙ ГИДРОВОЛНОВОЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 2012 |
|
RU2615288C2 |
| Волновой торцовый электродвигатель | 1981 |
|
SU1065989A1 |
| Электромеханический модульный сустав манипулятора | 1986 |
|
SU1371906A1 |
| Шарнир для соединения звеньев манипулятора | 1980 |
|
SU882736A1 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ЭКЗОСКЕЛЕТА | 2013 |
|
RU2549015C2 |

| Электромеханический сустав манипулятора | 1980 |
|
SU975396A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
