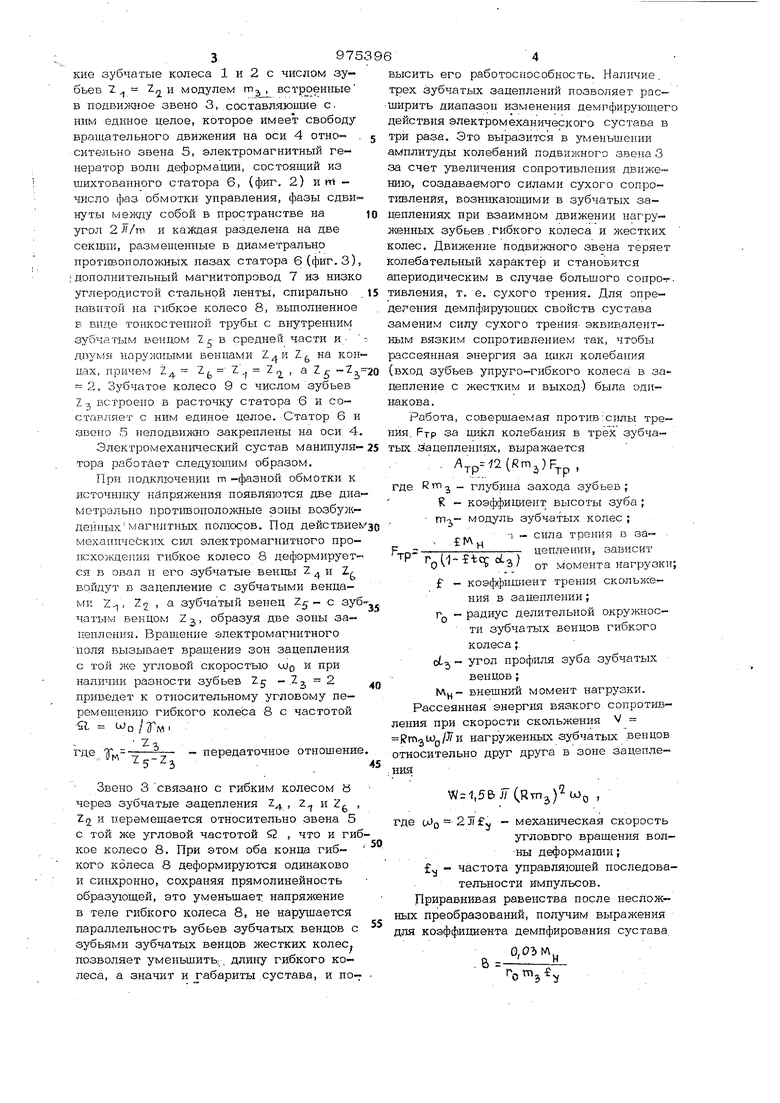
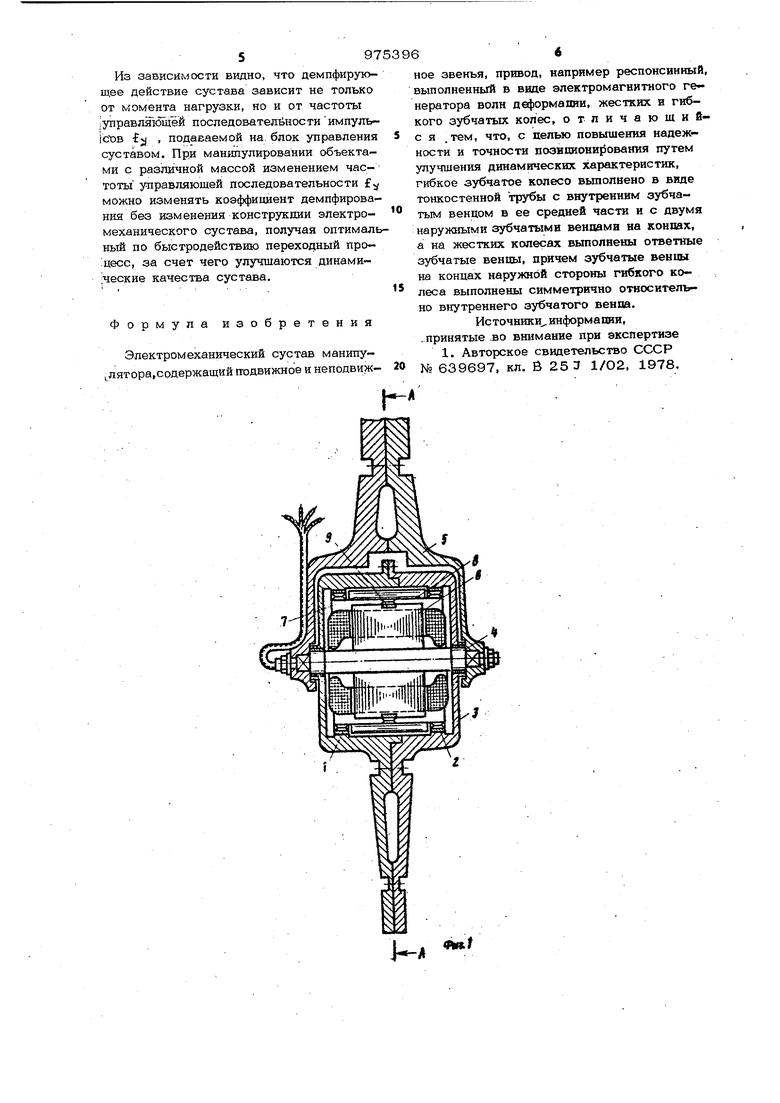
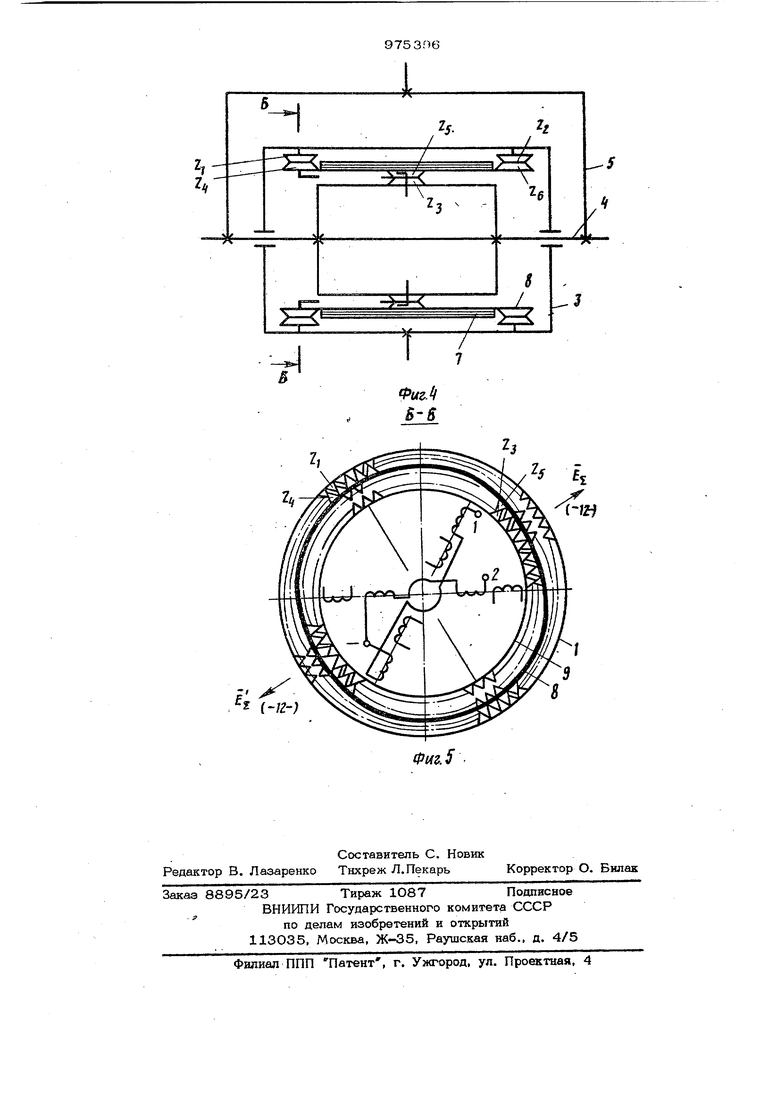
(54) ЭЛЕКТРОМЕХАНИЧЕСКИЙ СУСТАВ Изобретение относится к манипулятор ным :устройствам дастанционшлм.управпением и может был использовано при создании исполнительных органов дистан- 1щонно-управляе.мых манипупаторов для работы в зонах радиоактивного излучения под водой, в космосе и т. д. Известен, электромеханический сустав манипулятора, содержащий подвижное и неподвижные звенья, привод, состоящий из дифференциала и двух .реаукторов, и разгрузочный механизм,состоящий из упругого элемента, один конец которого кинематически связан с подвижньшЗ звеном, а другой - с неподвийоплм ГГ . Наличие в кинематической цепи дифференциала и двух редукторов ухудшает мас согабаритные характеристики, коэффициен полезного действия привода и его быстродействие. Перераспределение момента, развиваемого двигателем при подходе к точке пози1щонирования путем включения разгрузочного устройства, содержащего МАНИПУЛЯТОРА упругий элемент, приводит к зависанию управляемого звена. Цель изобретения - повьпиение надежности и точности позиционирования путем улучшения динамических характеристик. Эта цепь достигается тем, что гибкое зубчатое колесо выполнено в виде тонкостенной трубы с внутренним зубчатым венцом в ее средней части и с двумя наружными зубчатыми веннами на концах, а на жестких колесах выполнены ответные зубчатые венпы, зубчатые венцы на концах наружной стороны гибкого колеса вьшолнены симметрично относительно внутреннего:: зубчатчэго веноа. На фиг. 1 изображен электромеханический сустав манипулятора; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 - схема электромагнитного генератора волн деформации; на фиг. 4 - кинематическая .схема сустава; на фиг. 5 - сечение Б-Б на фиг. 4. Электромеханический сустав манипулятора (фиг. 1) содержит подвижные жесткие зубчатые колеса 1 и 2 с числом зубьев ,, 2. и модулем т , встроенные в подвилшое звено 3, .составляющие с. ним единое целое, которое имеет свободу вращательного движения на оси 4 отно™ сительно звена 5, электромагнитный генератор волн деформации, состоящий из шихтованного статора 6, (фиг. 2) и rti число фаз обмотки управления, фазы сдви нуты между собой в пространстве на угол 2 Ji/ni и каждая разделена на две секши-, размещенные в диаметрально противоположных пазах статора 6(фиг. 3) : дополнительный магнитопровод 7 из низко углеродистой стальной ленты, спирально навитой на гибкое колесо 8, выполненное Е виде тошшстенной трубы с внутренним зубчатым венцом Z в средней части и/ двумя наружными венцами Z на кон цах, причем 2 2 Z,j Z,2 , а Z 2j 2. Зубчатое колесо 9 с числом зубьев Z встроено Б расточку статора 6 и составляет с ним единое целое. Статор 6 и звено 5 неподвилшо закреплены на оси 4 Электромеханический сустав манинулятора работает следующим образом. При подключении m -(}зазной обмотки к источнику напряжения появлякэтся две диа метрально нротгшопололшые зоны возбуж- де)П1ыхмагнитных полюсов. Под действие механичеСжих сил электромагнитного про- псхождепия гибкое колесо 8 деформируется в овал н его зубчатые венпы 2 и Z войдут в зацепление с зубчатыми венцами 2, 2 , а зубчатый венец 2 - с зуб чатым венцом Z 2,, образуя две зоны зацепления. Вращение электромагнитного поля вызывает вращение зон зацепления с той же угловой скоростью ujp И при наличии разности зубьев Z приведет к относительному угловому перемещ,еншо гибкого колеса 8 с частотой gi Шо /YMI передаточное отношение Звено 3 связано с гибким колесом 8 через зубчатые зацепления z 2i и Z t,2. и перемещается относительно звена 5 с той же угловой частотой Я. , что и гиб кое колесо 8. При этом оба конца гибкого колеса 8 деформируются одинаково и синхронно, сохраняя прямолинейность образующей, это уменьшает напряжение в теле гибкого колеса 8, не нарушается параллельность зубьев зубчатых венцов с зубьями зубчатых венцов жестких колес позволяет уменьшить.;, длину гибкого колеса, а значит и габариты .сустава, и повысить его работоспособность. Наличие. трех зубчатых зацеплений позволяет расщирить диапазон изменения, демпфирующего действия электромеханического сустава в три раза. Это вырази1х;я в уменьщении амплитуды колебаний подвижного звена 3 за счет увеличения сопротивления движению, создаваемого силами сухого сопротивления, возникающими в зубчатых зацеплениях при взаимном движении нагрулвенных зубьев .гибкого колеса и жестких колес. Движение подвижного звена теряет колебательный характер и становится апериодическим в случае большого сопро-;-. тивления, т. е. сухого трения. Для определения демпфируюц(их свойств суста.ва заменим силу су.хого трения эквив.алент ным вязким сопротивлением так, чтобы рассеянная энергия за цикл колебания (вход зубьев упруго-гибкого колеса в зацепление с жестким и выход) была одинакова. Работа, совершаемая против:силы трения. FTP за цикл колебания в зубчатых .Зацеплениях, выражается ,тр:(. где Rrrij глубина захода зубьев; R - коэс{х;)ициент высоты зуба ; m-j- модуль зубчатых, колес ; -J сила трения в за- FTP ,. J. , цеплении, зависит Гр(1-±год осз/ Q момента нагрузки; f - коэф(1зидиент трения скольжения в зацеплении; г., - радиус делительной окружности зубчатых венцов гибкого колеса;, ci - профиля зуба зубчатых венцов; внешний момент нагрузки. Рассеянная энергия вязкого сопротивления при скорости скольжения V )рДи нагруженных зубчатых венцов относительно друг друга в зоне зацепле НИЯ W 1,5&J/ (Ятп2,) , 2м - механическая скорость углового вращения волны деформалщи; - частота управляющей последовательности импульсов. риравнивая равенства после несложпреобразований, получим выражения коэффициента демпфирования сустава в,ОЪ РО т -е. Из зависимости видно, что демпфирующее действие сустава зависит не только от момента нагрузки, но и от частоты .управляющей последовательности импуль ГсЪв fy , подаваемой на блок управления суставом. При ман1тулировании объектами с различной массой изменением частоты управляющей последовательности ,, можно изменять коэффициент демпфирования без изменения конструкции электромеханического сустава, получая оптималь ный по быстродействию переходный про:цесс, за счет чего улучшаются динами :Ческие качества сустава. Формула изобретения Электромеханический сустав манипу, лятора.срдержащйй подвижное и неподвижное звенья, привод, например респонсинный, выполненный в виде электромагнитного генератора волн деформации, жестких и гибкого зубчатых колес, отличающийс я . тем, что, с целью повышения надежности и точности позвшонирования путем улучшения динамических характеристик, гибкое зубчатое колесо выполнено в виде тонкостенной трубы с внутренним зубчатым венцом в ее средней части и с двумя наружными зубчатыми венцамн на коншх, а на жестких колесах выполнены ответные зубчатые венцы, причем зубчатые вениы на концах наружной стороны гибкого колеса выполнены симметрично относительно внутреннего зубчатого венца. Источники информации, .принятые .во внимание при экспертизе 1. Авторское сввдетельство СССР № 639697. кл. В 25 J 1/О2, 1978.
975396 /1-/ Фиг. (23-} , 
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический модульный сустав манипулятора | 1986 |
|
SU1371906A1 |
| Электромеханический сустав манипулятора | 1985 |
|
SU1265044A1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1135643A1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1013269A1 |
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| Мотор-редуктор | 1985 |
|
SU1403269A1 |
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Шарнир для соединения звеньев манипулятора | 1980 |
|
SU882736A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
ZT
.
T-I
Фиг. BS
