/ /S
СО
со о о
Изобретение оi носи гея к MaiUHHoeTpoe- iiiiK) и может быть использовано в конструкциях iipoMbiiiLienHbix роботов (ПР) и ма11И1.1Я 1-())()В.
Це.:ьк) изобретения яв;1яется расширение гехнологических возможностей за счет 11(). | чения двух степеней подвижности сустава при увел 1чении величины крутяшег о моменга и 11овын1еиие надежности )аботы (а счет ст)анения проскальзывания тел ка- .
Па ijiHi. I изображен члектромеханичес- молульный сустав манипулятора; на 2 вид А на (})И1. 1; на фиг. 3 раз- Г)-Б на фиг. 1: на фиг. 4 - узел I на (простое и комбинированное тело
кии
()И| .
рез
(|)ИГ.
качения планетарного механиз.ма); на фиг. Г) 11.таи скоростей тел качения волнового механизма; на фиг. 6 план скоростей те- .la качения планетарного механиз.ма.
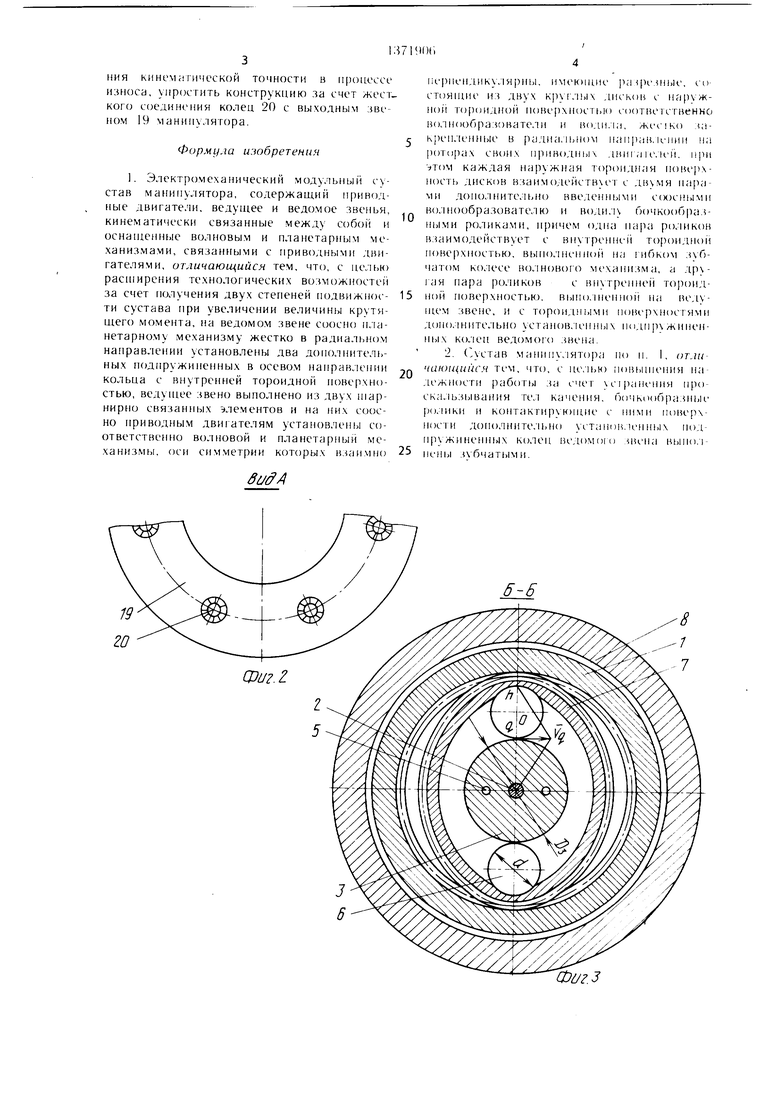
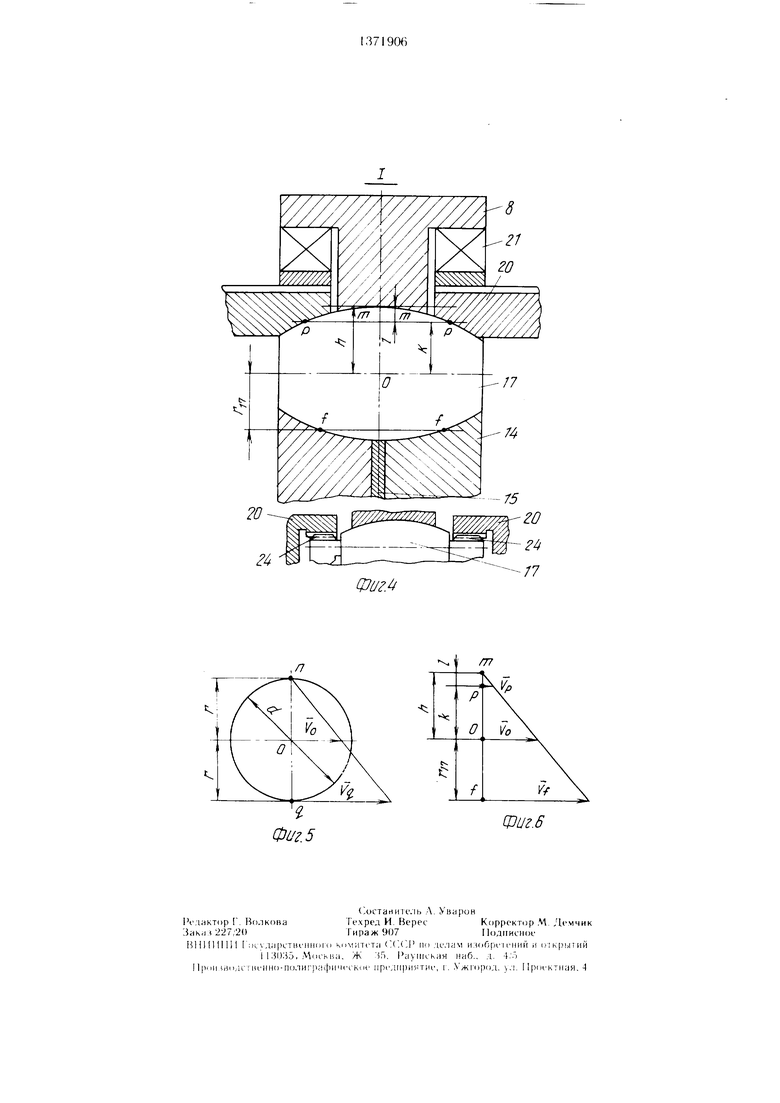
На в() ..тементе 1 ведущего .звена манинчлятора устано.тен приводной двигатель 2, на |)оторе которого закреплен круг- лы11 диск 3 В().1но()браз()вателя, состоян.1И11 из двух частей, разде. 1ен}и гч прокладкой 4, обеспечивающих вь|б()рку зазоров и создание предрифительного натяга с но.мошью бо. ггов Г) в зоне контакта бочкообразньгх Х)ликов (i и короткого гибкого зубчатого ко.теса 7, кс торое, взаимодействуя с зубчатыми в(. нцами входного элемента 1 и нро- межуточно|() у.темента 8 ведущего звена, сообщает пос.теднему вращательное движение. Л.1Я (.)беспечения жесткости и прочное ги конструкции :1Лемент 8 соединен не- иодиижно со звеном 9 и диском 10, носа- женным на подшипник 11. С целью замены грения скольжения на трение качения нри- менень нодщипники 12. На промежуточно.м элементе 8 установ.чен второй приводной двигате. И) 13, на роторе которого закреплены диски 14 води.ла нланетарного механизма, разделенные прокладкой 15. Б.таго- даря ноджатик) болтов Hi происходит образование натяга в зоне контакта дисков 14 и бочкообразщ гх роликов 17, а также ро- .1ИКОВ 17 и п)()межуточного элемента 8. Причем ротор двигателя 13 посажен в подшипник 18, установленный в звене 9. Вращение с дисков 14 передается на выходное 19 манину,тятора посредством взаимодействия роликов 17 с кольцами 20, посаженных с воз.можностью осевого пере.ме- щения в подшипники 21. Кольца 20 имеют на,1ьц1)1, образующие подвижное нлицевое С()едине11ие со звеном 19 манипулятора (({)иг. 2), и подпружиниваются в сторону дисков 14 пружинами 22. Для снижения на- r)y.u)K на те,та качения -- ролики 17 и замены грения ско,1ьжения на трение качения примене}1ы подшипники 23.
(летав работает следующим образом.
Приводной двигатель 2 вращает диск 3. Диск Л. взаимодействуя с роликами 6, со
общает им планетарное движение. Ролики 6 совергпают сложное движение - относительное вращательное движение и переносное вращательное движение.
Ролики 6, обкатываясь по внутренней тороидальной поверхности короткого гиб- Koi o зубчатого колеса 7, вводят его в зацепление с зубчатыми венцами входного элемента I и промежуточного элемента 8.
Общее передающее отно1иение i волнового механизма равно
I.. -2(H-rJrjl
1- Z,/Zj
5
0
5
0
радиус кривизны роi де fi-приводный
лика;
г, - радиус круглого диска 3; z,-число зубьев на промежуточном
элементе 8; i-число зубьев на входном эле.менте 1.
На промежуточном элементе 8 установ лен второй приводной двигатель 13, ротор которого приводит во вращение диск 14. Диск 14, взаимодействуя с роликами 17, сообщает им планетарное движение - движение обкатки внутренней тороидной поверхности промежуточного элемента 8 и до- нолнительно установленных колец 20. Кольца 20 имеют пальцы, которые входят в шли- цевые пазы выходного звена 19 манипулятора, поэтому при вращении кольца 20 вращается выходное звено 19 манипулятора с такой же угловой скоростью.
O6nj,ee передаточное отношение i пи планетарного механизма равно
35
1г
Cnr-f-h) (r -faj-u)
чСн-Я)
0
5
0
5
где
f,, - приведенный радиус ролика Си-радиус круглого диска 14; fi -расстояние от оси симметрии лика 17 до его мгновенной
ро- оси
вращения -m-m
абсолютного (фиг. 4);
R - расстояние от оси симметрии ролика 17 до его мгновенной оси от- носител1)Ного вращения 1 -f (фиг. 4);
Поджатием болтов 5 и 16 достигается осевое сближение дисков 3 и 14, тем самым производится выборка зазоров.
Сохранение постоянным передаточного отнощения между роликами 17 и выходны.м звено.м 19 манипулятора при изменении условий сцепления контактирующих поверхностей можно обеспечить путем введения зубчатого зацепления 24. С этой целью ролики 17 выполняются комбинированными с зубьями (фиг. 4), входящи.ми в зацепление с контактирующими с ними рабочими поверхностями колец 20. В последнем случае нредставляется возможным, кроме сохранения кине 1;1тическои точности в процессе износа, упростить конструкцию за счет жест, кого соединепия колец 20 с выходным звс - ном 19 манипулятора.
Формула изобретения
1. Электромеханический модульный сустав манипулятора, содержащий приводные двигатели, ведущее и ведомое звенья, кинематически связанные между собой и оснащенные волновым и планетарным механизмами, связанными с приводными двигателями, отличающийся тем, что, с целью рас1пирения технологических возможностей за счет получения двух степеней подвижности сустава при увеличении величины крутящего момента, на ведомом звене соосно планетарному механизму жестко в радиальном направлении установлены два дополнительных подпружииенных в осево.м направлении кольца с внутренней тороидной новерхно- стью, ведущее звено выполнено из двух шар- нирно связанных элементов и на них соосно нриводным двигателям установлены соответственно волновой и плаиетар1ц 1Й механизмы, оси симметрии которых взаимно
0
5
0
5
пс1)псндику.1ярны, имеющие ра рсзпые, , о стоящие из двух кру(, дисков с па)уж- ной то)оидиой новерхностыо соответственно волнообразователи и водила, Ж(,ч-|ко за- к)еп, 1енные в радиальном ii;in)aB.ii.-iuiM па poTofiax своих прнводн1)1 двига1С,и И, при каждая наружная тороидная П()ве|)х- ность дисков взаимодействчет с дв.мя ми до11олнитс. 1ЬН() введенными ссюсными во, 1нообразовате,1К) и води, 1 бочк(К)б|1аз- ными роликами, иричем одна Hafui ро.чиков взаимодействует с внутренней то)()идноп поверхностью, вьц1о, 1нс пной на гибком зубчатом колесе во. 1новог О механнзма, а гая пара ро.чиков с внутренней тороидной поверхностью, вьни),1иеин()Г| на веду- nicM звене, и с тороидмыми повс-рхносгями допо,-|нптс. 1ьно установ,1епиых подпрч ж и иен- ных Ko. ien ведомого звена.
2. ( устав манипу,1ЯТ()|1а по п. I, отличающийся тем, что, с целью 11о1и цпепия па дежности работы за счег ci ранения про- ска,;1ьз1)1вания re,i качения, бочкообразщ,. |)о, 1ики и контактирующие t ними iioBejn- носги дополните, и,но установ.юнных под- прхжиненных колеи всдомо с) звена выпо.1- пены з бчать1ми.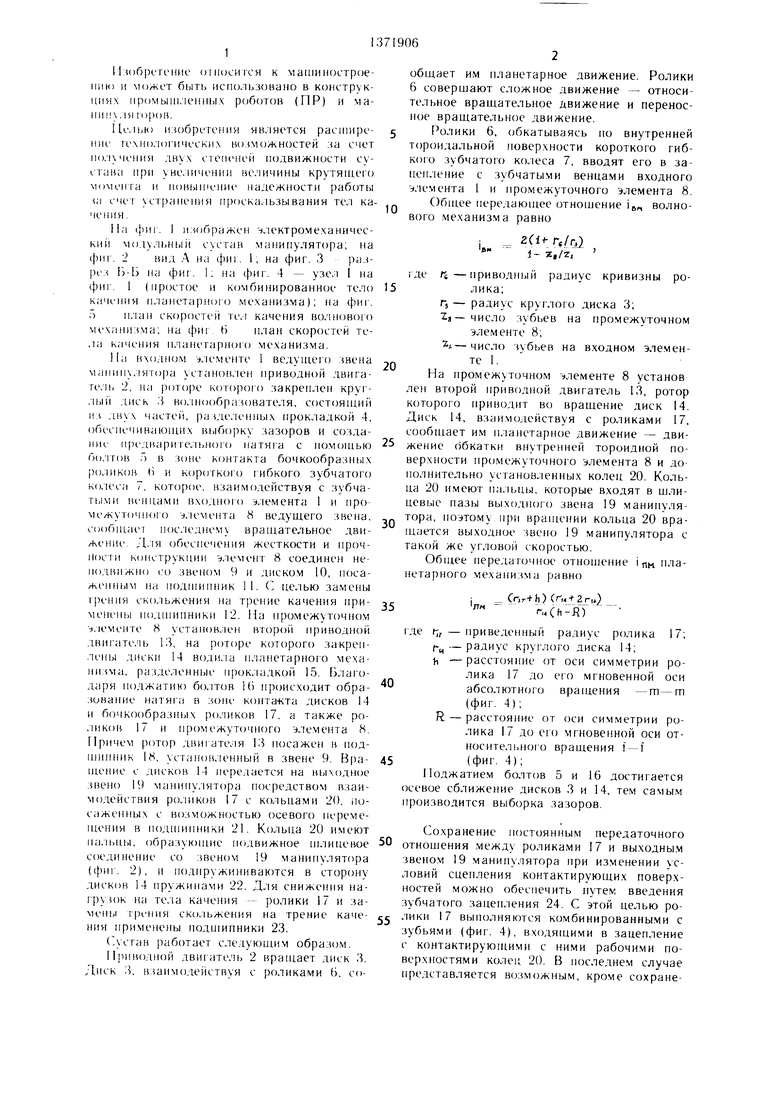
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1982 |
|
SU1144877A1 |
| Шарнир манипулятора | 1984 |
|
SU1294606A1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2005 |
|
RU2283975C1 |
| ПРОХОДЧЕСКИЙ ЩИТОВОЙ АГРЕГАТ (ГЕОХОД) | 2009 |
|
RU2418950C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Шарнир манипулятора | 1988 |
|
SU1535717A1 |
| МОТОР-РЕДУКТОР | 2000 |
|
RU2171526C1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Резервированный электромеханический силовой минипривод | 2020 |
|
RU2740466C1 |
Ичобретение относится к ман1иност|)ое нию и может быть исно.пь. в конструк- иия.х промькнленных роботов и манииуля- торов. Целью изобретения является раси1и- рение технологических во.шожнос reii ля счет получения двух степеней подвижности сустава при увеличении величины крутя- niei o момента и новьииение надежности работы за счет устранения и 1оскальзынания те.1 качения. При B),iiueiiHH ротора нриио.- HOI о двигате.1Я 2, установ. 1енно|-о ни lixo.i ном 1,1ементе I ведуикм о звена. нра1пается K)yi. диск 3 волн(.)образ()вате.1я. приво- дя1ЦН11 за счет сил трения но вран1ение бочкообразные ролики 6. (д)верп1ая планетарное движение, ролики 6 одновременно создают бегуп1ук) Bo.iny де(|)ормаиии корогко го I ибкого колеса 7. (тедствием :)того яв.чя- ется иоворот В1 1ходно| () звена 19 относн- те. вертикально оси сустава При вращении ротора двн|-а1еля 1,3 врапикмся диск 14 водила иланетарного механ1г;ма, кото pbiii в свою очередь ириводит во В 1ан1ение 10ЛИКН 17. Совергная п.кшетарное движение, ро.:1ики 17 приводят во вращение выходное звено 19 относительно i ()pH3oiria. оси с сгава. I з.и. ф-лы, ti н.т. (Л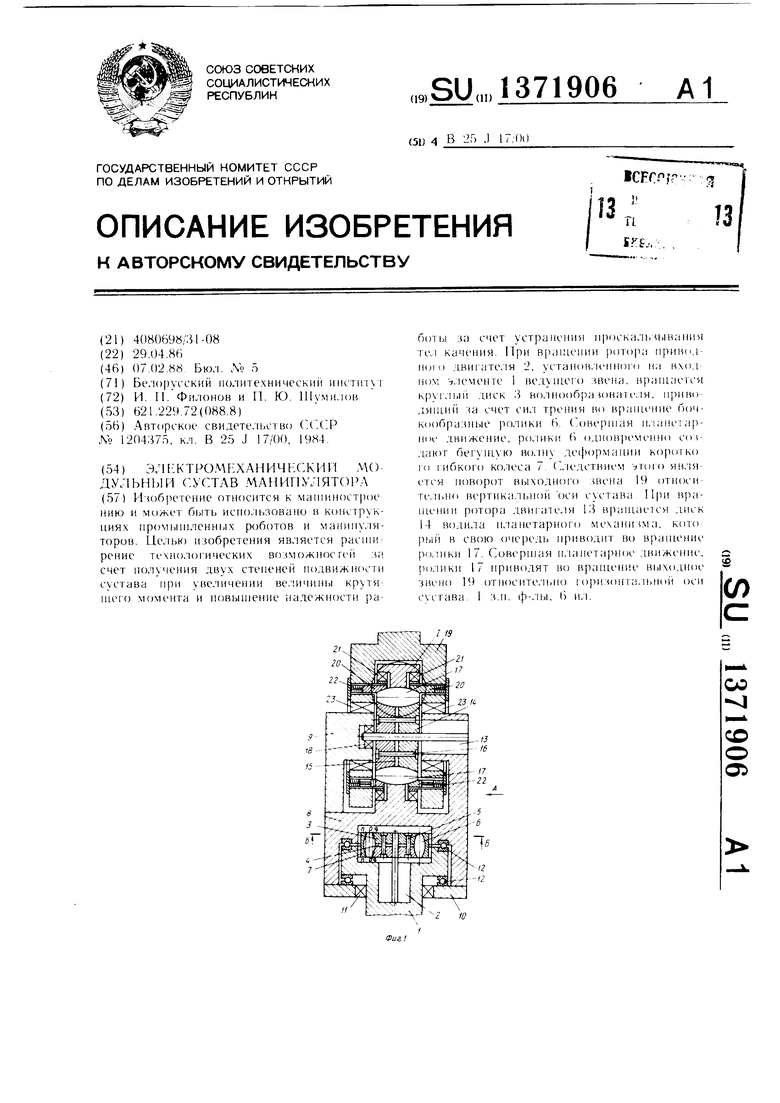
.з
Фиг.
х.
/77
i
о
v
с
Фиг.6
| Авторское свидете | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
