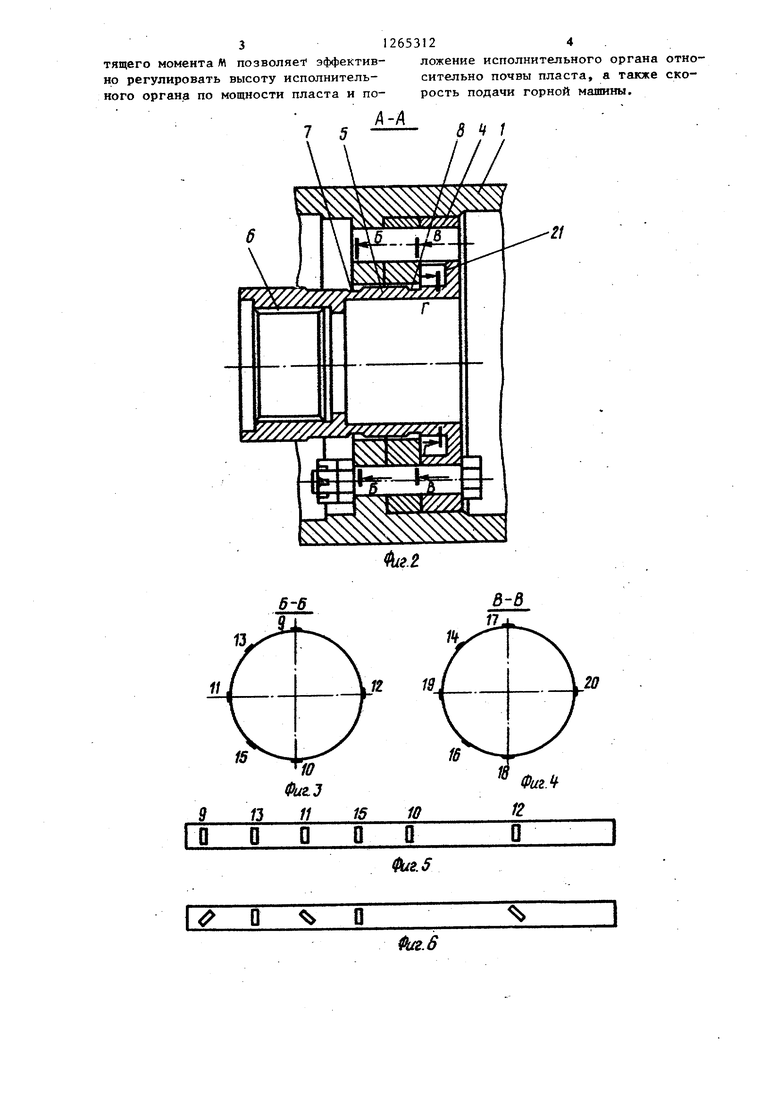
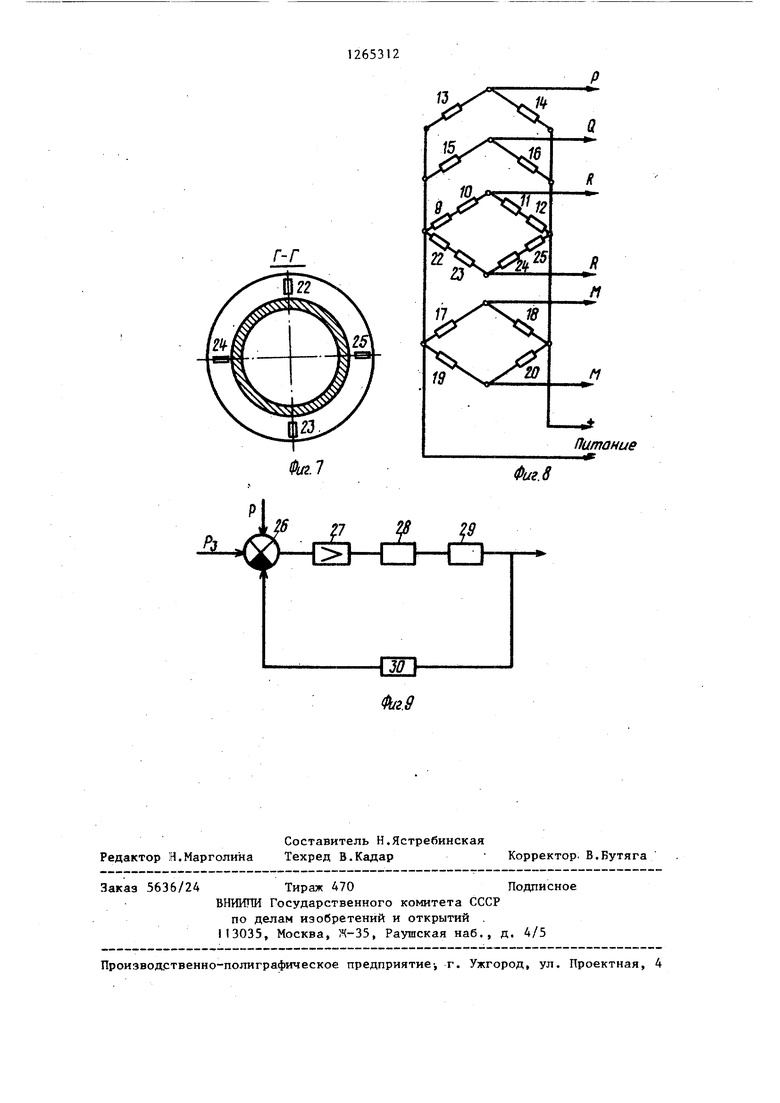
. Изобретение относится к горной промьшшенности, в частности к исполнительным органам очистных комбайнов шнекового и йа| абанного типа, и пред назначено для управления нагрузками, формирующимися при разрушении угольного пласта исполнительными органами комбайнов, перемещениями комбайна в профиле пласта, а также для измерения крутящего момента и трех суммарных составляющих сил, действующих на исполнительный орган при экспериментальных исследованиях, и является усовершенствованием устройства гго авт.св. № 1104259. Целью изобретения является обеспе чение эффективности управления испол нительным органом в процессе работы. На фиг.I изображен исполнительный орган, вид сбоку; на фиг.2 - разрез А-А на фиг.1;, на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на 4мг.2; на Лиг.5 - развертка проточки 7; на фиг.6 - развертка проточки 8; на фиг.7 - разрез Г-Г на фиг.2; на фиг.8 - схема соединения датчиков; на фиг.9 - блок-схема системы управления горной машиной. Исполнительный орган горной машины содержит корпус 1 с кулаками 2, оснащенными резцами 3. Корпус 1 прикреплен к фланцу 4 измерительной втулки 5, вьшолненной в виде полого цилиндра с внутренними шлицами 6. Между шлицами 6 и фланцем 4 расположены две проточки 7 и 8. На проточке 7 закреплены датчики 9 - 13 и 15, а на проточке 8 - 14 и 16 - 20. На фланце 4 измерительной втулки 5 выполнен кольцевой паз 21, в котором закреплены дополнительные датчики 22 - 25. Датчики 9-12 предназначены, как и датчики 22 - 25 для измере ния суммарной осевой составлякицей силы возмущения R . Для повышения чувствительности измерительной втулки 5 датчики 11, 12 и 24, 25 имеют противоположную (дьфочную) проводимость датчикам 9,10,22 и 23. Датчики .13, 14 и 15, 16 предназначены соответственно дпя измерения составляющих Р и Q. Для обеспечения независимости фиксации величин Р и 5 от точки приложения их на исполнительном органе, датчики 13 и 15 расположены на проточке 7, а датчики 14 и 16 на проточке 8. Датчики 17 - 20 расположены под углом 45 к продольной оси 2 втулки 5 и предназначены для измерения крутящего момента трансмиссии. атчики 9-20 и 22-25 взаимодействуют с системой управления машиной. Система управления горной машиной состоит из элемента 26 сравнения и усилителя (при необходимости усиления управляющего сигнала),передаточного устройства 28, исполнительного механизма 29 и воспринимающего элемента 30. Функцию воспринимающего момента выполняет измерительная втулка 5. Устройство работает следующим образом. Исполнительный орган, на корпус 1 которого установлены кулаки 2, оснащенные резцами 3, разрушает угольный массив. При взаимодействии исполнительного органа с забоем, через фланец 4 на измерительную втулку 5 действуют три суммарные составляющие силы возмущения Р, Q, R и крутящий момент М, которые вызывают деформацию проточек 7 и 8 и кольцевого паза 21, воспринимаемую соответственно датчиками 9-20 и 22-25, которые вырабатывают сигналы, пропорциональные деформациям. Составляюн(ие сил возмуще1ШЯ Р и Q, изгибающие измерительную втулку 5, фиксируются соответственно датчиками 13, 14 и 15, 16. Составляющая R , сжимаю1цая измерительную втулку 5 и изгибающая кольцевой паз 21 на фланце 4, ({мксируется датчиками 9 - 12 и 22 - 25. Датчики 17-20 4иксируют КРУТЯ1Щ.1Й момент /Л . Электрические сигналы Р поступают на элемент сравнения 26,, на последний подается также сигнал Р, на который настроена система до начала работы. В случае неравенства сигналов элемент сравнения 26 вырабатьгеает сигнал рассогласования Рр-Р.,-Р. Этот сигнал при необходимости усиливается усилителем 27 и через передаточное устройство 28 подается к исполнительному механизму 29, который отрабатывает рассогласование до тех пор, пока не наступит равенство „-Р,. Кроме того, сигналы от датчиков 9-20 и 22-25 могут быть поданы на регистрирующую аппаратуру при проведении шахтных или стендовых исследований горных машин. Измерение трех суммарных составляющих сил возмущения Р , Q и R и кру312653124
тящего момента М позволяет эффектив- ложение исполнительного органа отнонр регулировать высоту исполнитель- сительно почвы пласта, а также сконого органа по мощности пласта и по- рость подачи горной машины.
А-А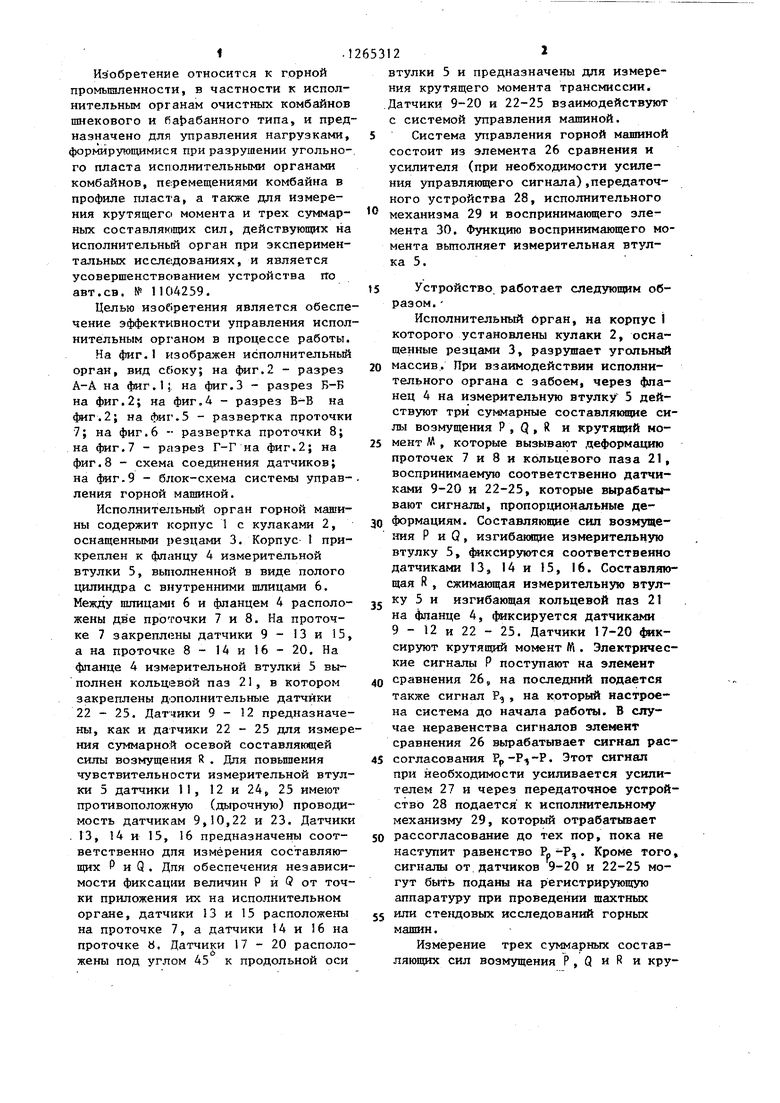
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган горной машины | 1983 |
|
SU1104259A1 |
| Способ и устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1977 |
|
SU767346A1 |
| Исполнительный орган горной машины | 1982 |
|
SU1145130A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОЙ МАШИНЫ | 1998 |
|
RU2132460C1 |
| ГОРНЫЙ ОЧИСТНОЙ КОМБАЙН | 1993 |
|
RU2065959C1 |
| КРЕПЛЕНИЕ РЕЖУЩЕЙ ГОЛОВКИ ГОРНОГО КОМБАЙНА | 2015 |
|
RU2574654C1 |
| Привод горного комбайна | 1989 |
|
SU1671853A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Стенд для исследования горных машин | 1984 |
|
SU1155747A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОЙ МАШИНЫ | 1997 |
|
RU2120549C1 |
ИСПОЛРШТЕЛЬНЫЙ ОРГАНА ГОРНОЙ МАИШНЫ по авт.св. № 1104259, отличающийся тем, что, с целью обеспечения эффективности управления исполнительным органом в процессе работы, втулка выполнена с кольцевым пазом и снабжена дополнительными датчиками, при этом паз выполнен на фланце втулки, плоскость которого перпендикулярна оси втулки, а дополнительные датчики размещены в кольцевом пазу. (Л
6-6
13
15
О11
DP D
О i f
п.
1Z 19
16
ФигЛ
12
10
Q
Фuг.S
Фиг.6
х
П
/7.
W
f1
W
Питание
ФикЛ
Фиг. 8
| МИШЕНЬ, СИГНАЛИЗИРУЮЩАЯ О ПОПАДАНИИ В ЦЕЛЬ | 1926 |
|
SU4259A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
