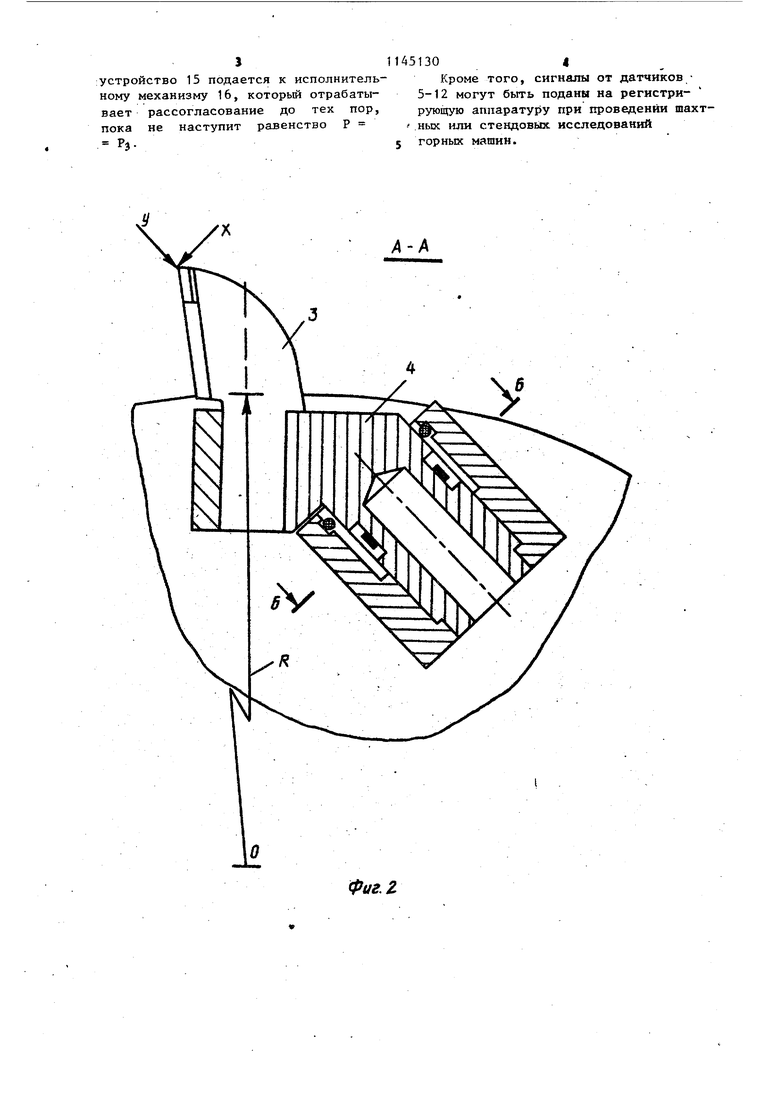
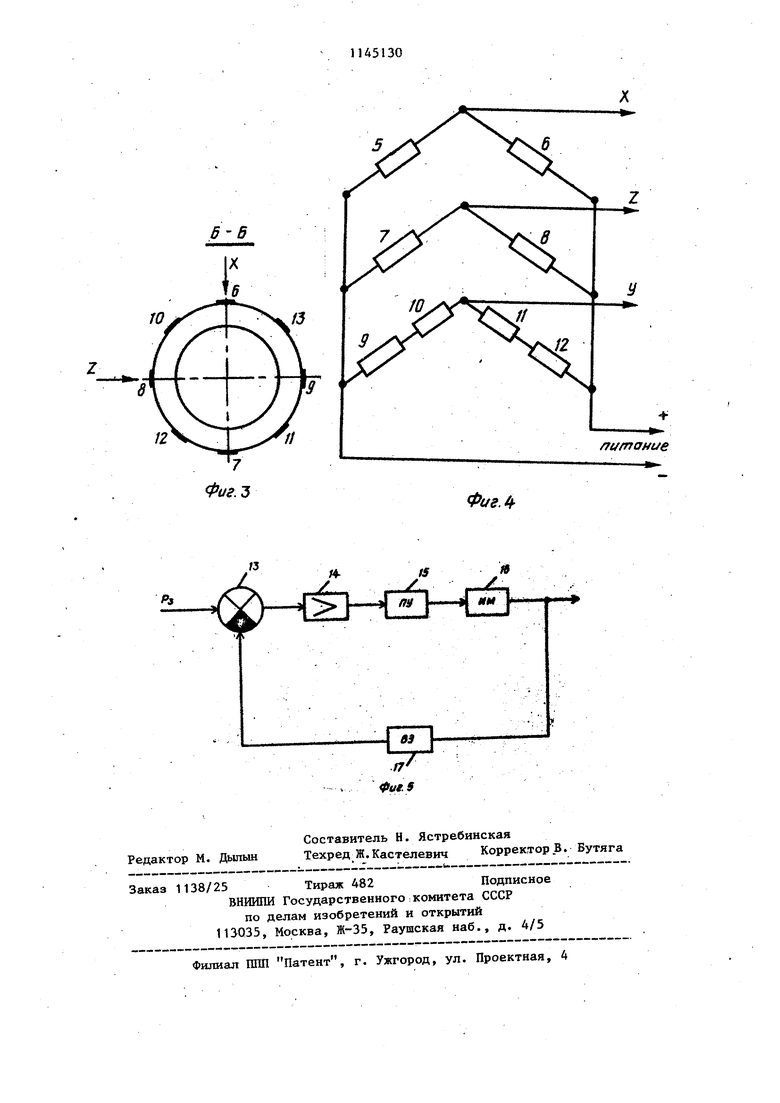
Изобретение относится к горной промьшшенности, .а именно к исполнительным органам очистных комбайнов шнекового и барабанного Типа, и предназначено для автоматизации управления нагрузками, формирующими ся при разрушении угольного пласта исполнительными органами комбайнов перемещениями комбайнов в профиле пласта, а также для измерений усилий резания при экспериментальных исследованиях. Целью изобретения является обеспечение управления. ; На фиг. 1 изображен исполнительньй орган, общий вид; на фиг. 2 разрез А-А на.фиг. 1; на фиг.З - ра рез Б-Б на фиг.2; на фиг. 4 - схема соединения датчиков; на фиг. 5 блок-схема управления горной машино Исполнятельный орган горной маши ны содержит режущие резцы 1, установленные в кулаках 2, резец 3, закрепленный в измерительном опорно элементе 4 На измерительном опорном элементе 4 установлены датчики 5 - 12. Датчики 5 и 6 расположены в плос кости действия составляющей силы х а датчики 7 и 8 - составляющей z. Датчики 9, 10, 11 и 12 расположе ны в плоскости, перпендикулярной оси действия составляющей у, и пред назначены для измерения этой состав 11яющей. При применении полупроводншсовд 1х датчиков датчики 9 и 10должны быть противоположной проводимости датчикам 11 и 12, либо датчики 9 и 10 установлены как компенсируюшле, т.е они не реагируют на напряжения . изгиба и сжатия.. Датчики 5-12 связаны с системой управления..Система управления горн машины состоит из элемента срйвнения 13, усилителя 14 (при необходимости усиления управляющего сигнала) , передаточного устройства 15, исполните-иьного механизма 16 и воспринимающего элемента 17. Функцию воспринимающего элемента 17 вьтолняёт предложенное устройство. Таким образом резец 3 через датчики 5-12 связан с системой упра ления. Устройство работает следующим образом. Исполнительньй орган резцами 1, установленными в кулаках 2, разрушает угольный массив. При взаимодействии резца с забоем на него, как и на другие резцы 1, действуют тря составляющие суммарной силы резания (х, у, z), /которые вызывают деформацШв измерительного опорного элемента 4. Измерительный опорный элемент 4 выполнен полым для того, чтобы повысить чувствительность при сжимающих напряжениях. Суммарная сила резания, действующая на резец 3, постоянно изменяет свое направление действия в пространственной области, месторасположение которой определяется углами в плоскости ре- . зания и в плоскости, перпендикулярной ей. Угол наклона оси измерительного элемента 4 к радиусу исполнительного органа выбирается таким, при котором напряжения сжатия в его стенках являются максимальными и обеспечивают повышенную чувствительность и точность измерений. Надежность измерений опорного элемента 4 в этом случае повьшается, потому что изгибные напряжения от составляющих суммарной силы резания х и z незначительны. Деформация опорного элемента воспринимается датчиками 5-12, установленными на этом же опорном элементе, и ими вырабатываются электрические сигналы, пропорциональные деформациям. Составляющие суммарной силы резания х и Z, изгибающие измерительный опорньй элемент, фиксируются соответственно датчиками 5, 6 и 7, 8. Такая установка датчиков обеспечивает исклю чение влияния составяющей X на деформации, вызываемые составляющей z, т.е. исключается влияние одной составляющей силы резания на фиксируемое показание другой и наоборот. Датчики 9-12 фиксируют-, составляющую у, . I Электрические сигналы Р поступают к элементу сравнения 13,. на который подается также сигнал Pj на который настроена система до начала работы. В случае неравенства сигналов, элемент сравнения 13 вырабатывает сигнал рассогласования ДР Р - Р. Этот сигнал усиливается при необходимости усилителем 14 и через передаточное
:устройство 15 подается к исполнительному механизму 16, которьш отрабатывает рассогласование до тех пор, пока не наступит равенство Р PJ.
Кроме того, сигналы от датчиков 5-12 могут быть поданы на регистрирующую аппаратуру при проведении шахт.ньк или стендовых исследований горных машин.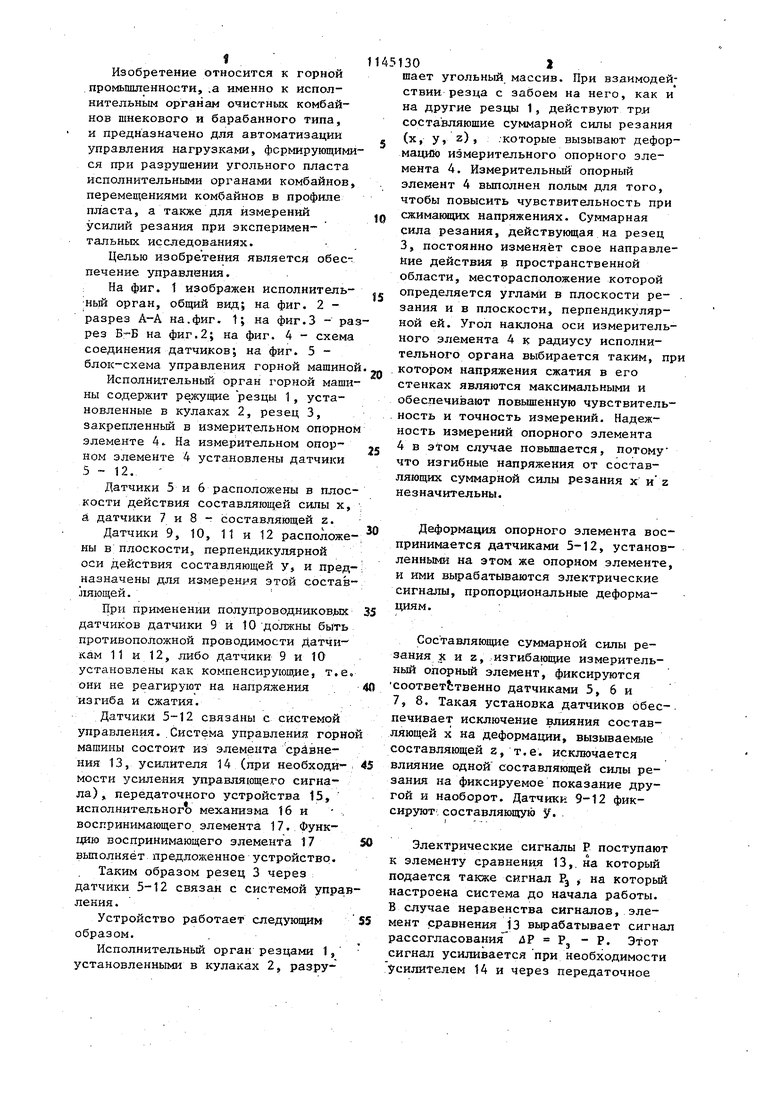
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган горной машины | 1983 |
|
SU1104259A1 |
| Устройство для управления горной машиной | 1981 |
|
SU976074A1 |
| Исполнительный орган горной машины | 1984 |
|
SU1265312A2 |
| Устройство для управления горной машиной | 1983 |
|
SU1116158A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ РЕЗЦА НА ИСПОЛНИТЕЛЬНОМ ОРГАНЕ МАШИНЫ | 2015 |
|
RU2602435C1 |
| СПОСОБ РАЗРУШЕНИЯ ГОРНОГО МАССИВА ПЕРЕКРЕСТНЫМИ РЕЗАМИ | 2008 |
|
RU2375571C1 |
| Исполнительный орган горной машины | 1985 |
|
SU1411454A1 |
| Устройство контроля положения исполнительного органа горной машины в профиле пласта | 1974 |
|
SU721532A1 |
| Измерительный резец горной машины для определения сопротивляемости резанию | 1986 |
|
SU1323707A1 |
ИСПОЛНИТЕЛЬНЬЙ ОРГАН ГОРНОЙ МАШИНЫ, включающий корпус с установленными не нем рекуя ади инструментами , укрепленными в кулаках, и резцом, укрепленным в измерительном опорном элементе, и датчикц, отличающийся тем, что, с целью обеспечения управяен11я ИСПОИЕнительным органом датчики установлены на измерительном опорном элементе, а его ось расположена под углом к радиусу корпуса исполнительного органа.
У1Фиг.1 А
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля положения исполнительного органа горной машины в профиле пласта | 1978 |
|
SU771331A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исполнительный орган барабанного типа для горной машины | 1969 |
|
SU619117A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
