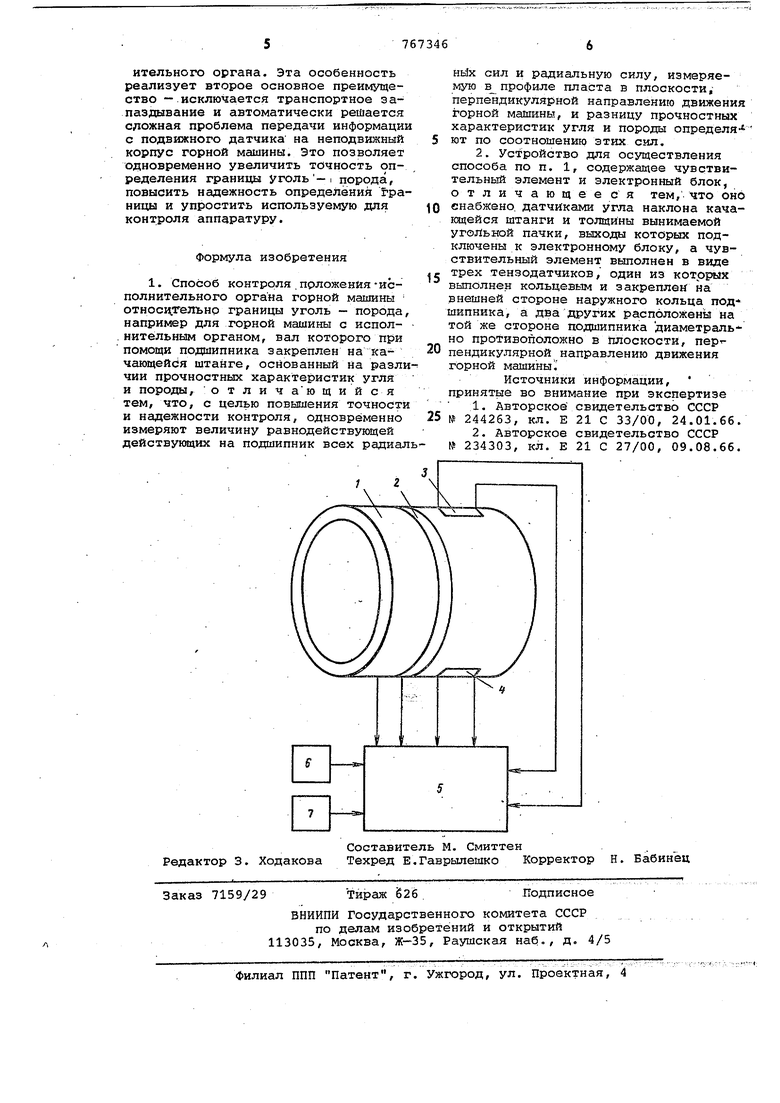
МётЬально противоположно в плоскости перпендикулярной направлению движения горной машины. На чертеже приведена схема устрой ства, поясняющая сущность изобретения . На внешнем неподвижном подшипнике 1 со стороны посадочной поверхности выполнена кольцевая проточка, на которую наклеен первый тензометрйческий датчик 2, Опоясывающий проточку. Второй тензометрический датчик 3 и третий тензометрический датчик 4 закреплены в диаметрально противополож ных канавках. Выходы всех тензометри ческих датчиков соединены с входами электронного блока 5, Датчик угла на клона б качающейся штанги (на которо закреплен исполнительный оргии горной машины) соединен с электронным блоком 5. Датчик толщины вынимаемой угольной пачки 7 также соединен с входом электронного блока 5; При монтаже устройства неподвижное кольцо подшипника 1 устанавливают так, что (при среднем положении качающейся штанги) датчик 3 обращен к кровле, а датчик 4 - к почве. Устройство работает следующим образом. При движении горной машины вдоль забоя тензометрический датчик 2 изме ряет величину равнодействующей всех радиальных сил R, , действующих на по шипник вала, вращающегося исполнител ного органа. Тензодатчик 3 измеряет величину радиальной силы F/ , действу щей на подшипник в профиле пласта в плоскости, перпендикулярной к направ лению движения комбайна. Вектор силы F направлен к кровле. Тензодатчик 4 измеряет величину радиальной силы F действующей на подшипник в плоскости перпендикулярной к направлению движе ния комбайна, причем вектор силы Р, направлен к почве. Рассмотрим случай, когда устройст во работает у кровли пласта. При это величина равнодействующей Р определяется, типоразмером горной машины и ее исполнительного органа, скоростью движения подачи машины, массой испол нительного органа, физико-механическими характеристиками вынимаемого уг Wir, расположением и параметрами резцов на исполнительном органе и т.п. Равнодействующая ( F, - Pij.) будет, в об щем случае, определяться также перечисленными выше параметрами. Если исполнительный орган при движении горной машины вдоль забоя не производит разрушения переходного слоя границы уголь - порода (выемка угля без присечки переходного слоя границы уголь - порода), то соотношение величины Р и (Р„ -Р ) остается постоянным: с ростом Р пропорционально увеличивается (f -Р ). Если же ис полнительный орган начинает разрушат переходной слой границы уголь - порода (который характеризуется более высокими нежели вынимаемый слой угля прочностными параметрами) или осуществлять присечку породы в кровле; то равнодействующая (р -F ) изменяется быстрее, нежели Р , и соотношение между ними изменяется. По величине этого изменения судят о степени присечки породы в кровле. Величина соотношения Р и (РО,-P/J) определяется в электронном блоке 5, в который поступают сигналы от датчика 2 (пропорциональный величине Р ) и от датчиков 3 и 4 (пропорциональный величине (Rj - Frj) . Сигнал, пропорциональный соотношению Р-, и (Р,-Р ), подается на гйдродомкрат для регулирования исполнительного органа по высоте. Если после его регулирования изменяется-, угол наклона .качаквдейся штанги, то при той же величине () изменится суммарный сигнал с датчиков 3 и 4 г Чтобы скорректировать суммарный сигнал до прежней величины, в электроннмй блок 5 вводят сигнал с датчика угла наклона б, пропорциональный изменению угла наклона качающейся штанги. Устройство- работает аналогично и у почвы пласта, когда высота вынимаемого слоя угла равна диаметру исполнительного органа. Если же толщина вынимаемой пачки угля меньше диаметра исполнительного органа, то соотношение между () и F., увеличивается (при прочих равных условиях) при уменьшении вынимаемой пачки угля. Если толщина вынимаемой пачки изменяется по длине забоя, то соотношение сигналов с датчиков 2, 3, 4, б также изменяется при изменении толщины вынимаемой пачки. Чтобы свести это изменение к минимуму, на вход электронного блока 5 от датчика 7 подается сигнал-, пропорциональный толщине вынимаемой пачки угля, В результате обработки сигналов с датчиков 2 f. 3, 4, 6, 7 в электронном блоке формируется сигнал, величина которого не изменяется от изменений толщины вынимаемой пачкиугЛяи угла наклона качающейся танги. Этот сфорг-шрованный сигнал является мерой присечки породы в почве пласта И используется для регулиования положения исполнительного органа. Основной положительной рсобенностью способа и устройства является использование в качестве основного источника получаемой информации сам исполнительный орган горной-машины. При этом в любой момент времени получается интегрированная информация со всей ширины захвата исполнительного органа. Второй основной положительной особенностью способа и устройства является, возможность прортогчэ снятия информации с подвижного испол
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением исполнительного органа горной машины в профиле пласта | 1974 |
|
SU779577A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы уголь-порода и устройство для его осуществления | 1980 |
|
SU977770A1 |
| Способ автоматического управления положением режущего органа угледобыващей машины | 1972 |
|
SU466328A1 |
| Очистной механизированный комплекс | 1989 |
|
SU1696723A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Способ определения порогов срабатывания системы управления угольным комбайном в профиле пласта | 1982 |
|
SU1093808A1 |
| Датчик контроля скрытой границы породы-уголь | 1979 |
|
SU861592A1 |
| Устройство контроля границы порода-уголь пласта для горной машины,на исполнительных органах которой установлены режущие зубки | 1982 |
|
SU1046505A1 |
| Способ контроля скрытой границы порода-уголь | 1980 |
|
SU911030A1 |
| СПОСОБ РАЗРАБОТКИ ПЛАСТОВЫХ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ПРОХОДЧЕСКО-ДОБЫЧНОЙ КОМБАЙН ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2103507C1 |
