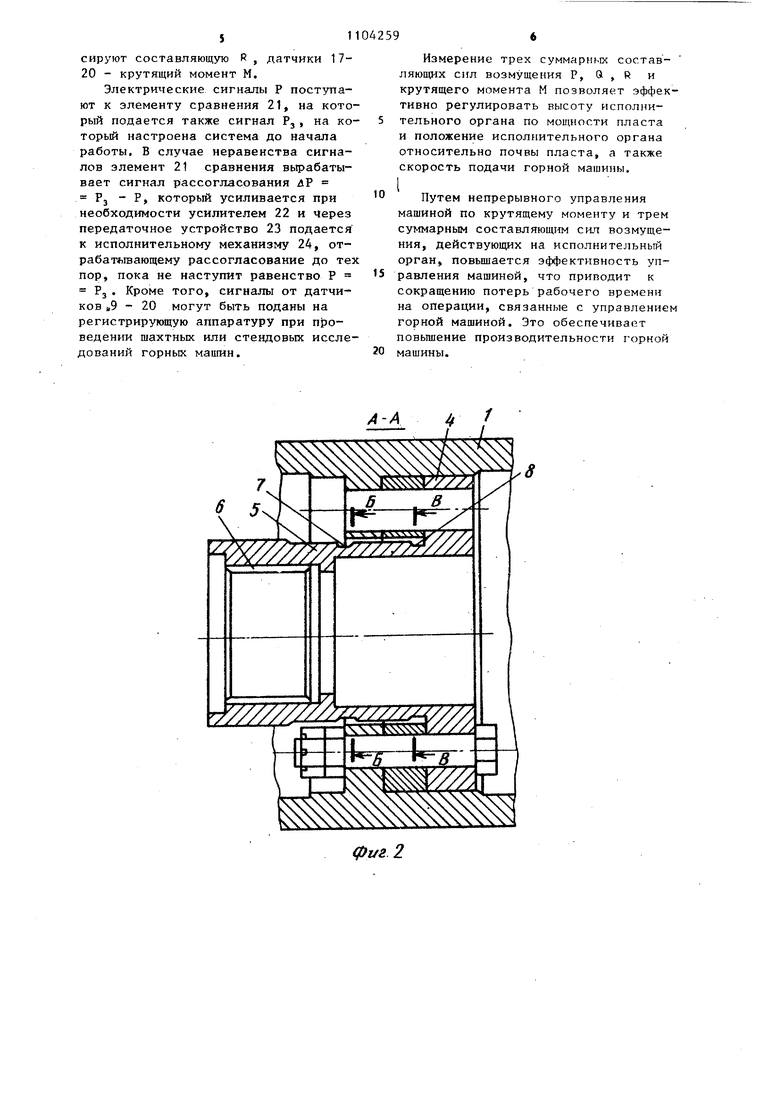
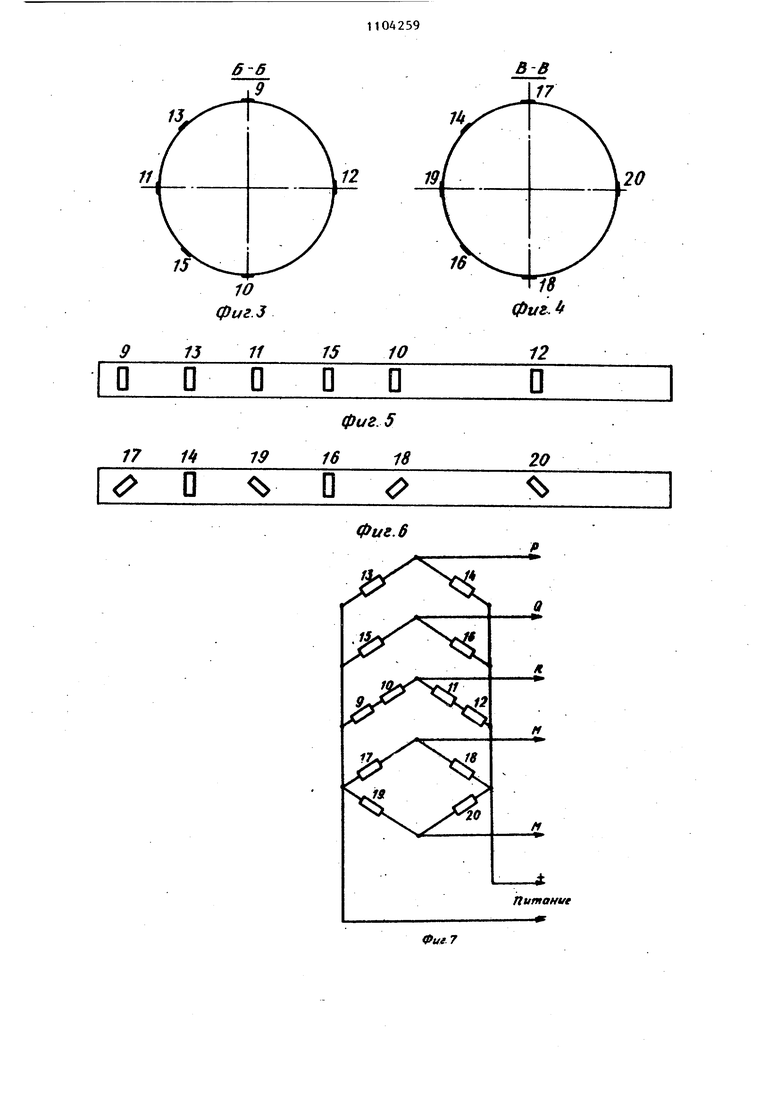
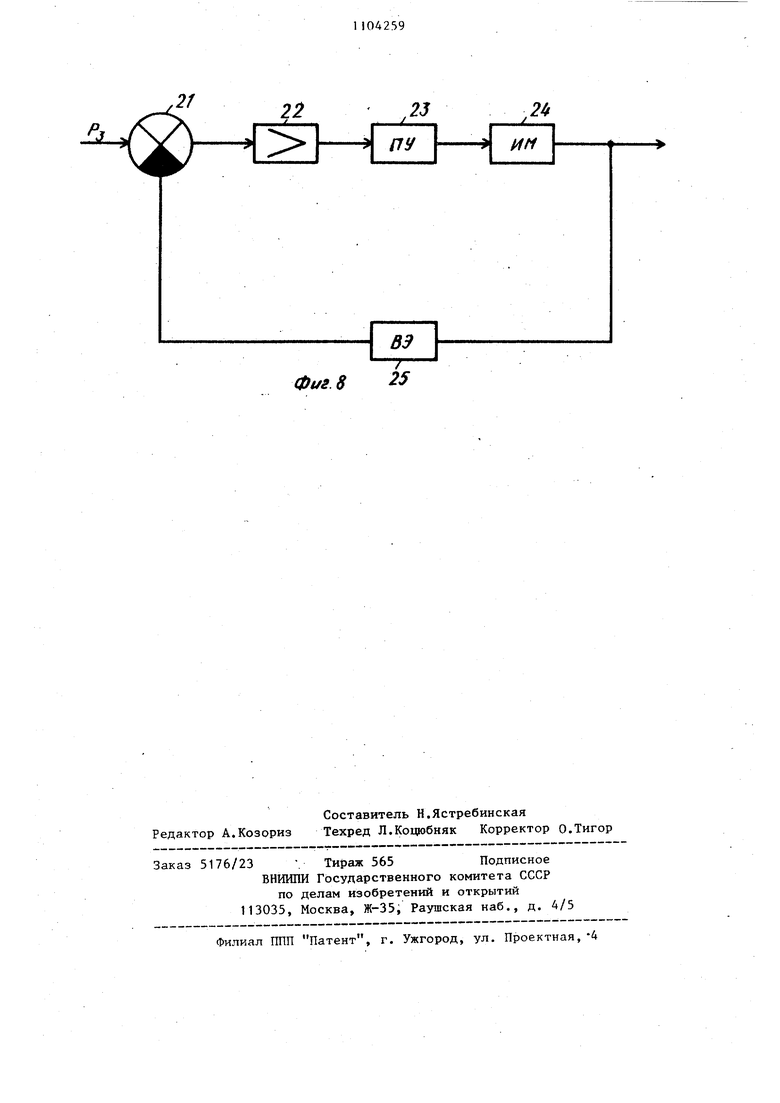
Изобретение относится к горной промьюшенности, в частности к исполнительным органам очистных комбайнов шнекового и барабанного типа, и предназначено для автоматизации управления нагрузками, формирующимися при разр тцении угольного пласта исполнительными органами комбайнов, перемещениями комбайнов в профиле пласта, а также для измерения крутящего момента на исполнительном.органе и трех суммарных составляющих сил возмущения, действукяцих на исполнительный орган при экспериментальных исследованиях. Известно устройство для контроля положения исполнительного органа, воспринимаювдай элемент которого содержит корпус с гнездом для резца, снабженный Г-образной рамой, один конец которой жестко связан с корпусом, а на свободном конце рамы закреплен резец. На балках рамы расположены датчики, связанные с системой управления машиной. При работе исполнительного органа сила резания, сила подачи и боковая сила изгибают балки Г-образной рамы. Деформации балок воспринимаются датчиками, которые вырабатывают электрические сигналы, пропорциональ ные силам. Эти сигналы поступают в систему управления машиной или на регистрирующую аппаратуру при проведении исследований С1 3« Основной недостаток устройства состоит в низкой эффективности управ ления ГОРНОЙ машиной, так как управление комбайном ведется периодически во время контакта измерительного рез ца с угольным массивом. Кроме того, данное устройство обладает низкой надежностью и малой стабильностью получаемого управляющего сигнала. Показания датчиков, измеряющих силу резания, определяются значением этой силы и плечом ее приложения. В процессе работы резец изнашивается. Следовательно, плечо приложения силы резания меняется. Значит, меняются и показания датчиков (хотя сила резания может оставаться постоянной по величине) ,что снижает эффективност управления горной машиной по риле резания. Наиболее близким техническим реше нием к изобретению является исполнительньй орган, вьтолненный в виде ба рабана, оснащенного неподвижно закрепленными в резцедержателях режущими резцами и измерительным резцом, укрепленным в резцедержателе. Измерительный резец установлен за одним из неподвижно закрепленных резцов с большим вылетом. Измерительный резец и расположенный перед ним резец размещены в отдельном корпусе, укрепленном на боковой части исполнительного органа. Разцедержатель измерительного резца расположен на упругом опорном элементе. При разрушении исполнительным органом массива полезного ископаемого измерительный резец вследствие податливости опорного элемента смещается назад, что вызывает изменение индуктивного электромагнитного потока в воздушном зазоре между резцедержателем и преобразователем,. который установлен в корпусе сзади измерительного резца. Преобразователь создает соответствующий электрический сигнал в цепи управления горной машиной Цгз. Основным недостатком известного устройства является низкая эффективность управления горной машиной, так как управление комбайном ведется периодически во время контакта измерительного резца с угольным массивом. При взаимодействии измерительного резца с твердыми породными включениями возникают погрешности в управляющем сигнале. Кроме того, изменения зазора меяоду резцедержателем и преобразователем, определяющие величину сигнала управления комбайном, определяются не только действием одной составляющей суммарной силы резания, приложенной к передней грани резца, но также и составляющими силы резания по задней и боковым граням резца. Причем влияние, например, составляющей силы, приложенной к задней грани резца противоположно по действию составляющей силы по передней грани резца, так как первая имеет плечо приложения относительно оси симметрии податливого участка опорного элемента. Это обстоятельство приводит при увеличении составляющей силы по задней грани резца к увеличению зазора между резцедержателем и преобразователем, что обуславливает появление сигнала ошибки, который, накладываясь на сигнал от 31 составляющей, действующей на передню грань резца, искажает его. Аналогичное искажение управляющего сигнала возникает и от составляющей, действующей на боковые -грани резца. Низкая эффективность управления известной горной машиной обусловлена, кроме того, конструкцией измерительного элемента, который вырабатывает сигнал в зависимости от индуктивности, определяемой величиной воздушного зазора между резцедержателем и преобразователем, так как при эксплуатации исполнительного органа, работаннцего в среде, состоящей из кусков угля, штыба, пыли, при повышенной влажности возможна заштыбовка зазора между резцедержателем и преобразователем, что исключит появление или значительно исказит управляющий сигнал. Цель изобретения - обеспечение возможности эффективного управления исполнительным органом в процессе работы путем непрерывного управления мапшной по крутящему моменту и трем суммарным составляющим сил возмущения, действующим на исполнительный орган. Поставленная цель достигается тем, что исполнительный орган горной машины, содержащий корпус с кулаками, оснащенными резцами, датчики, взаимодействующие с системой управле ния машиной, снабжен втулкой, к кото рой жестко закреплен корпус, при этом на внешней поверхности втулки вьтолнены проточки, на которых реплены датчики.. Такая конструкция позволяет эффек тивно управлять машиной по крутящему моменту М и трем суммарным составляю щим сил возмущения Р, и , R , действующим на исполнительный орган. На фиг. 1 изображен исполнительны орган, вид сбоку, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез 2; на фиг. 5 - развертка В-В на фиг. 2; на фиг. 5 - развертка проточки 1 на фиг. 6 -развертка проточки 8; на фиг. 7 -схема соединения датчиков, на фиг. 8 - блок-схе ма системы управления горной машиной Исполнительный орган горной машимы содержит корпус 1 с кулаками 2, оснащенными резцами 3. Корпус 1 закреплен к фланцу 4 измерительной втул 9 ки 5, вьшолненной в виде полого ци- линдра с внутренними шлицами 6, а между шлицами 6 и фланцем 4 расположены две проточки 7 и 8, На проточке 7 закреплены датчики 9 - 14, на проточке 8 - датчики 15 - 20. Датчики 9 - 12 расположены в плоскости, перпендикулярной оси действия суммарной составляющей силы возмущения R , и предназначены для ее измерения. Дпя повышения чувствительности измерительной втулки 5 на сжатие датчики Ни 12 имеют противоположную (дырочную) проводимость датчикам 9 и 10. Датчики 13, 14 и 15, 16 предназначены соответственно для измерения составляющих Р и -Q . Дпя обеспечения независимости фиксации величин Р и Q от точки приложения их на исполнительном органе датчики 13 и 15 расположены на проточке 7, а датчики 14 и 16 - на проточке 8. Датчики 1720 расположены под углом 45 к продольной оси втулки 5 и предназначены Д.Т1Я измерения крутящего момента трансмиссии. Датчики 9-20 взаимодействуют с системой управления машиной. Система управления горной машиной состоит из элемента 21 сравнения, усилителя 22 (при необходимости усиления управляющего сигнала), передаточного устройства 23, исполнительного механизма 24 и воспринимающего элемента 25, Функцию воспринимающего элемента 25 выполняет измерительная втулка 5. Устройство работает следующим образом. Исполнительный орган, на корпус 1 которого установлены кулаки 2, оснащенные резцами 3, разрушает угольный массив. При взаимодействии исполнительного органа с забоем через фланец 4 на измерительную втулку 5 действуют три суммарные составлякнцие сил возмущения Р, fi , R и .крутящий момент М, которые вызывают деформацию проточек 7 и 8. Деформации проточек воспринимаются датчиками 9 - 20, установленными на этих проточках и ими вырабатываются электрические сигналы, пропорциональные деформациям. Составляющие сил возмущения Р и Q, изгибающие измерительную втулку, фиксируются соответственно датчиками 13, 14 и 15, 16. Датчики 9-12 фиксируют составляющую Р , датчики 1720 - крутящий момент М. Электрические сигналы Р поступают к элементу сравнения 21, на кото рый подается также сигнал Р, , на ко торый настроена система до начала работы. В случае неравенства сигналов элемент 21 сравнения вырабатывает сигнал рассогласования ЛР РЗ - Р, который усиливается при необходимости усилителем 22 и через передаточное устройство 23 подается к исполнительному механизму 24, отрабатывающему рассогласование до тех пор, пока не наступит равенство Р РЗ. Кроме того, сигналы от датчиков в9 - 20 могут быть поданы на регистрирующую аппаратуру при njpoведении шахтных или стендовых исследований горных маиган. 1 9 Измерение трех суммарных составляющих сил возмущения Р, а , R и крутящего момента М позволяет эффективно регулировать высоту исполнительного органа по мощности пласта и положение исполнительного органа относительно почвы пласта, а также скорость подачи горной машины. Путем непрерывного управления машиной по крутящему моменту и трем суммарным составляющим сил возмущения, действующих на исполнительный орган, повышается эффективность управления машиной, что приводит к сокращению потерь рабочего времени на операции, связанные с управлением горной машиной. Это обеспечивает повьш1ение производительности горной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган горной машины | 1984 |
|
SU1265312A2 |
| Исполнительный орган горной машины | 1982 |
|
SU1145130A1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ РЕЗЦА НА ИСПОЛНИТЕЛЬНОМ ОРГАНЕ МАШИНЫ | 2015 |
|
RU2602435C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ РЕЗЕЦ С УСТРОЙСТВОМ КРЕПЛЕНИЯ НА ИСПОЛНИТЕЛЬНОМ ОРГАНЕ МАШИНЫ | 2018 |
|
RU2672071C1 |
| Устройство для управления горной машиной | 1983 |
|
SU1116158A1 |
| РЕЗЕЦ ДЛЯ ГОРНЫХ И ДОРОЖНЫХ МАШИН | 2018 |
|
RU2681743C1 |
| РЕЗЕЦ ДЛЯ ПРОХОДЧЕСКО-ОЧИСТНЫХ И ВЫЕМОЧНЫХ КОМБАЙНОВ (ВАРИАНТЫ) | 2013 |
|
RU2530138C1 |
| Устройство для управления горной машиной | 1981 |
|
SU976074A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОЙ МАШИНЫ | 1998 |
|
RU2132460C1 |
| Исполнительный орган горной машины | 1985 |
|
SU1411454A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОЙ МАШИНЫ, содержащий корпус с кулаками, оснащенными резцами, датчики, взаимодействующие с системой управления машиной, отличающийся тем, что, с целью обеспечения возможности эффективного управления исполнительным органом в процессе работы, он снабжен втулкой, к которой жестко закреплен корпус, при этом на внешней поверхности втулки выполнены проточки, Н9 которых закреплены датчики.. fcn to ел. со
, . . , .,-,,,
&22Z
т
/////7 :
-А
8
фиг 2
д
1510
1511
D ODD D
фиг. 5
77 /«
1916
7А
16
12
18
20
Фиг 8 S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3324739/22-03, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Исполнительный орган барабанного типа для горной машины | 1969 |
|
SU619117A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
