Изобретение относится к машиностроению. Цель изобретения - упрощение конструкции путем изменения кинематической связи. На фиг. 1 и 2 показан механизм преобразования возвратно-поступатель ного движения во вращательное, варианты выполнения. Механизм для преобразования возвратно-поступательного движения во вращательное содержит корпус 1,. в котором установлен шток 2, средняя часть которого вьшолнена в виде двух оппозитно расположенных зубчатых реек 3 и 4 с внешними (фиг. 1) или с внутренними (фиг. 2) зубьями. Цент ральное колесо 5 установлен на выходном валу и кинематически связано с рейками 3 и 4. Кинематическая связь вьшолнена в виде установленных на осях 6 в водиле 7 двух сателлитов 8 и 9, взаимодействующих поочере з,но с одной из реек 3 и 4 с внешними зубьями (фиг. 1), или одного сателлита 10, взаимодействующего также пооче редно с одной из реек 3 и 4 с внутренними зубьями (фиг. 2), фиксаторо 11 (или упоров 12) углового положения водила 7 и устройства поочередн го ввода сателлитов 8-10 в зацеплен Последнее может быть выполнено в ви де расположенных на противоположных концах каждой рейки 3 и 4 двух зуб чатых сегментов 13 и 14 соответстве но с наружными и внутренними зубьями (фиг. 1) или двух кулачков 15 и 16, укрепленных на противоположных концах каждой из зубчатых реек 3 и и взаимодействующих с роликом 17, установленным на осях 6 сателлита 10 (фиг. 2) . Расположение зубьев на рейках 3 и 4 и сегментах 13 и 14 не должно препятствовать вращению сателлитов 8 и 9 относительно своих осей 6 в крайних положениях штока 2. Для сни жения динамической нагруженности механизма вблизи мертвых положений на штоке 2 установлены упоры 18 которые вместе с упругими элементами 19 образуют демпферы-гасители скоростей движения щтока 2 перед см ной им знака перемещений. Водило 7 связано с корпусом 1 пружиной 20. Механизм работает следующим образом. 1УВозвратно-поступательное движение штока 2 приводит в однонаправленное вращение сателлиты 8-10, поочередно взаимодействующие с рейкой 3 при движении штока 2 вниз или с рейкой 4 при движении штока 2 вверх. Вращение сателлитов 8-10 передается центральному колесу 5 и выходному валу 6. Межцентровое расстояние при зацеплении реек 3 и 4 с сателлитами 8 и 9 выдерживается фиксатором 11 (фиг. 1) или упорами 12 (фиг. 2), к которым водило 7 прижимается пружиной 20 на всем протяжении хода штока 2. Вблизи крайнего мертвого положения механизма происходит касание упора 18 с упругим элементом 19 и его сжатие, что вызывает гашение кинетической энергии поступательно движущихся масс механизма и создает некоторый запас потенциальной энергии в упругом элементе 19, которьм расходуется в начале обратного хода. Одновременно осуществляется процесс перебрасывания водила 7 из -одного крайнего положения в другое с тем, чтобы поочередно ввести в зацепление рейки 3 и 4 . В механизме, изображенном на фиг. 1, переброс водила 7 осуществляется усилием, нозникаюш 1м при взаимодействии сателлитов 8 и 9 с соответствующими зубчатыми сегментами 14 и 13. Для другого варианта механизма (фиг. 2) переброс водила 7 осуществляется за счет взаимодействия кулачков 15 и 16 с роликом 17, поджатым пружиной 20. Преимущество предлагаемого механизма заключается в том, что достигнуто упрощение конструкции путем уменьшения общего количества зубчатых передач и устранением кривошипношатунного механизма, возможностью регулирования оборотов выходного вала выбором параметров зубчатых колес, обратимостью механизма и более равномерной величиной вращающего момента на выходном валу. Формула изобретения 1. Механизм преобразования возвратно-поступательного движения во вращательное, содержащий шток, сред31
няя часть которого выполнена в виде оппозитно расположенных зубчатых реек с внешними или внутренними зубьями, и центральное колесо, кинематически связанное с рейкаЙ11, отличающийся тем, что, с целью упрощения конструкции, кинематическая связь вьтолнена в виде установленных на осях в водиле двух сателлитов, взаимодействующих поочередно с одной из реек с внешними зубьями, или одного сателлита, взаимодействующего поочередно с одной из реек с внутренними зубьями, устройства поочередного ввода сателлитов в зацепление и фиксаторов углового положения водила.
654214
2.Механизм поп, 1, отличающийся тем,,что устройство поочередного ввода сателлита в зацепление с одной из реек с впутрен-5 ними зубьям -, вьпюлиено в В1оде кулачков, укрепленных на противоположных концах каждой из зубчатых реек.
3.Механизм по п, 1. о т л и ч а10 ющийся тем, что устройство
поочередного ввода сателлитов в зацепление с одной из реек с внешними зубьями выполнено в виде расположенных на противоположных концах ка;кдой 15 рейки двух зубчатых сегментов, из которых один с наружными, а другой с внутренними зубьяьш.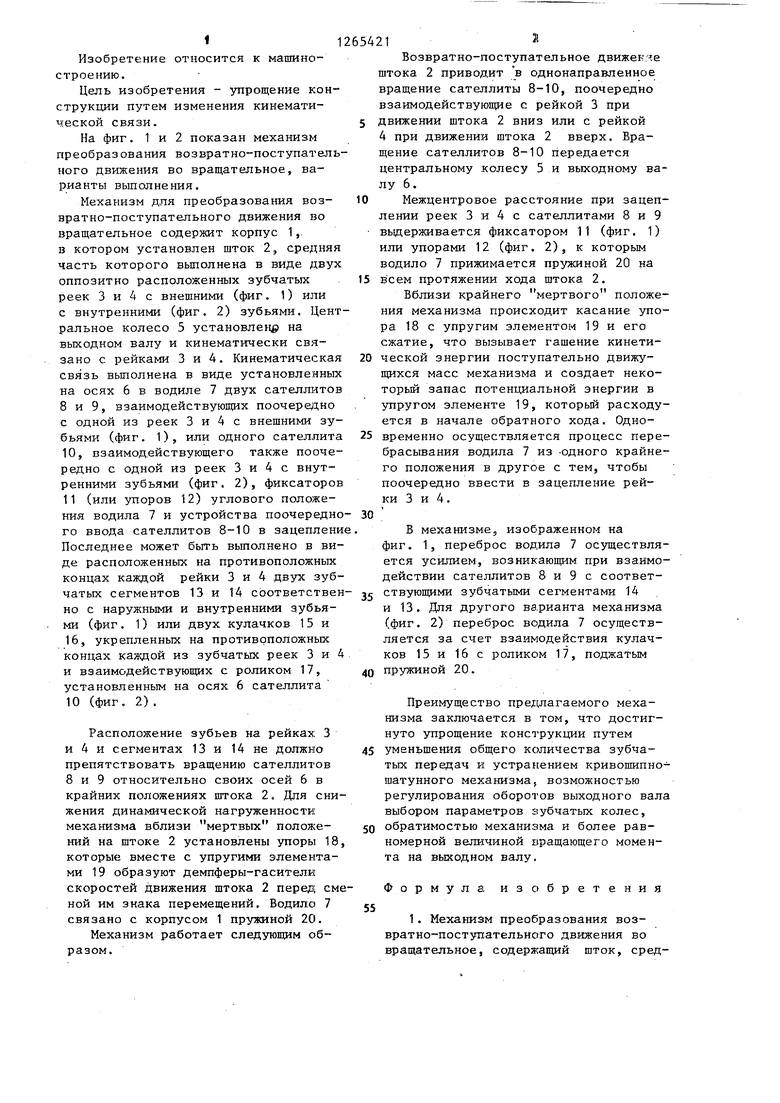
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования возвратно-поступательного движения во вращательное | 1990 |
|
SU1776902A1 |
| Механизм для преобразования возвратно- пОСТупАТЕльНОгО пЕРЕМЕщЕНия ВОВРАщАТЕльНОЕ | 1978 |
|
SU842312A1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ И ОБРАТНО | 2005 |
|
RU2297564C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2007 |
|
RU2351783C2 |
| ЗУБЧАТО-РАМОЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2003 |
|
RU2266446C2 |
| РЕГУЛИРУЕМАЯ ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1991 |
|
RU2006723C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2416747C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ | 2005 |
|
RU2308603C2 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
Изобретение относится к машиностроению. Целью изобретения является упрощение конструкции за счет изменения кинематической связи. Преобразование движения осуществляется за счет поочередного взаимодействия двух зубчатпых реек, укреплеиньк на . штоке с установленными на осях в водиле сателлитами, зацепляющимися с выходным центральным колесом. При одном сателлите последний взаимодействует поочередно с одной из реек с внутренними зубьями. При выполнении двух сателлитов последние поочередно взаимодействуют с одной из реек с внешними зубьями. В каждом случае сателлиты вводятся в движение устройством поочередного ввода сателлитов в зацепление. Устройство с S может быть выполнено в виде укреплен(Л ных на противоположных концах реек кулачков или зубчатых сегментов. Me- .. ханизм имеет фиксатор углового положения водила. 2 з.п. ф-лы, 2 ил.
| Кожевников С.Н | |||
| и др | |||
| Механизмы,М.: Машиностроение, 1976, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ добычи гидроторфа на залежах, подверженных обвалам и оползням | 1959 |
|
SU126865A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
