ятся в зацеплении сателлиты, закреп ленные на качающемся вокруг оси выход ного вала водиле Сателлиты поочередно вводят в зацепление с зубчатым штоком- 1 ползунов при каждом изменении направления их движения, вращая центральную шестерню тем самым в одном и том же направлении.
Такой механизм имеет неудовлетворм д тельную уравновешенность, поскольку оппозитно расположенные ползуны движутся одновременно в одну сторону, что ухудшает его ПД„
Целью изобретения является повыше-55 ние КПД механизма и снижение потреб- ляемой их мощностио
Сущностью- изобретения является то, что каждый из оппозитно расположенных в корпусе ползунов шарнирно соединен «0 зубчатой рейкой, которые находятся в непосредственном зацеплении с центральной ведущей шестерней при встречм ном движении ползунов, а при обратном их ходе - зацепление реек с централь 25 ной ведущей шестерней осуществляется через сателлиты,,
Ввод-вывод зубчатых реек и сателлитов в зацеплении с центральной шее терней осуществляется с помощью нап- зо равляющих на зубчатых рейках, кулачков, кулис и фиксатора„
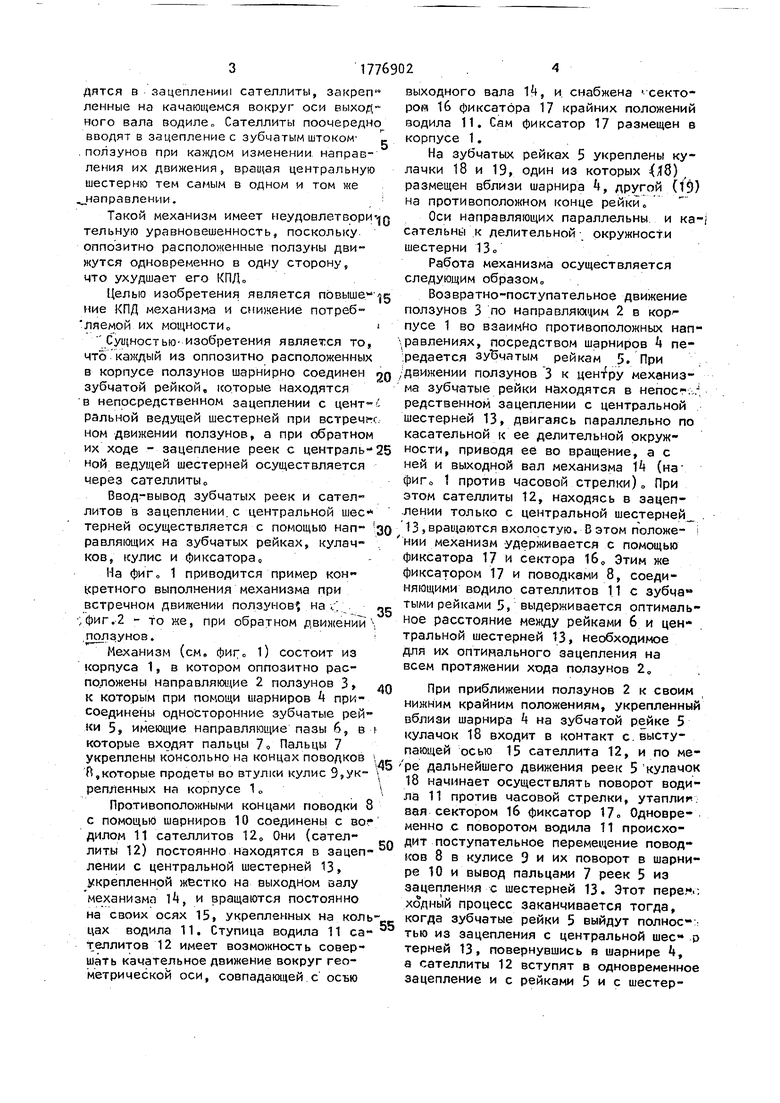
На фиг о 1 приводится пример конкретного выполнения механизма при встречном движении ползунов на фиг.2 - то же, при обратном движении ползунов.
Механизм (см, фиг0 1) состоит из корпуса 1, в котором оппозитно расположены направляющие 2 ползунов 3, к которым при помощи шарниров k присоединены односторонние зубчатые рейки 5, имеющие направляющие пазы 6, в f которые входят пальцы 7 Пальцы 7 укреплены консольно на концах поводков .,. ft,которые продеты во втулки кулис 9,УК- репяенных на корпусе 10
Противоположными концами поводки 8 с помощью шарниров 10 соединены с во дилом 11 сателлитов 12„ Они (сателлиты 12) постоянно находятся в зацеп лении с центральной шестерней 13, укрепленной жбстко на выходном валу механизма И, и вращаются постоянно на своих осях 15, укрепленных на коль цах водила 11. Ступица водила 11 са- теллитов 12 имеет возможность совершать качательное движение вокруг геометрической оси, совпадающей с осью
35
40
,.50
1
д 55
0 25
зо
.,.
69024
выходного вала 1, и снабжена секто- рой 16 фиксатора 17 крайних положений водила 11. Сам фиксатор 17 размещен е корпусе 1.
На зубчатых рейках 5 укреплены кулачки 18 и 19, один из которых О8) , размещен вблизи шарнира , другой (19) на противоположном конце рейки
Оси направляющих параллельны и ка-| сательны к делительной окружности шестерни 13о
Работа механизма осуществляется следующим образом
Возвратно-поступательное движение ползунов 3 по направляющим 2 в кор - пусе 1 во взаимйо противоположных направлениях, посредством шарниров А передается зубчатым рейкам 5. При движении ползунов 3 к цен-fpy механизма зубчатые рейки находятся в непос1-. .J редственном зацеплении с центральной шестерней 13, двигаясь параллельно по касательной к ее делительной окружности, приводя ее во вращение, а с ней и выходной вал механизма И (на фиг 1 против часовой стрелки)„ При этом сателлиты 12, находясь в зацеплении только с центральной шестерней 13, вращаются вхолостую. В этом положении механизм удерживается с помощью фиксатора 17 и сектора 1б„ Этим же фиксатором 17 и поводками 8, соединяющими водило сателлитов 11 с зубчам тыми рейками 5, выдерживается оптимальное расстояние между рейками 6 и центральной шестерней 13, необходимое для их оптинального зацепления на всем протяжении хода ползунов 2„
При приближении ползунов 2 к своим нижним крайним положениям, укрепленный вблизи шарнира А на зубчатой рейке 5 кулачок 18 входит в контакт с выступающей осью 15 сателлита 12, и по ме- - ре дальнейшего движения реек 5 кулачок 18 начинает осуществлять поворот водила 11 против часовой стрелки, утаплиг вая сектором 16 фиксатор 17 Одновременно с поворотом водила 11 происходит поступательное перемещение поводков 8 в кулисе 9 и их поворот в шарнире 10 и вывод пальцами 7 реек 5 из зацепления с шестерней 13. Этот ходный процесс заканчивается тогда, когда зубчатые рейки 5 выйдут полностью из зацепления с центральной шее о терней 13, повернувшись в шарнире 4, а сателлиты 12 вступят в одновременное зацепление и с рейками 5 и с шестер35
40
50
ней 13 о При этом положении механизма будет зафиксировано фиксатором 17 и сектором 1б во втором положении, при котором должен осуществляться его
.обратный ход.
Поскольку между рейками 5 и терней 13 вступили в зацепление са теллиты 12, то движение реек, а следовательно, и ползунов 3 сменится на противоположное - от центра механизма к периферии, а вращение центральной шестерни 13 сохранится в прежнем направлении
10
деталями механизма не было избыточн кинематических связей, т,е вначале происходил вывод зубчатых реек 5 из зацепления для прекращения одного х да, а затем их ввод в таковое для совершения противоположного хода строго по принципу зуб во впадинУ
Формула изобретени
Механизм преобразования возвратно-поступательного движения во вращ тельное, содержащий корпус, установ
При обратном ходе механизма рейки 5 15 ленные в нем выходной вал, закрепсвоими направляющими 6 скользят по пальцам 7, положение которых зафиксировано поводками 8, кулисой,3, шарниром 10, водилом 11 и фиксаторами 16 и 17, чем выдерживается оптимальное расстояние для зацепления реек с сателлитами 12, поскольку угол качания зубчатых реек 5 в шарнире 4 невелик за период всего обратного хода механизма
К концу обратного хода кулачок 19, укрепленный на конце одной из зубчатых реек 5, войдет в контакт с выступающей осью сателлита 15 и начнет ее, а следовательно, и водило сателлитов 11.перемещать (на фиг. 1 - по часовой стрелке-) и одновременно все связанные с ним детали. Произойдет перекатывание сателлитов 12 по центральной шестерне 13 и вывод их из зацеп- ления с рейками 5, Поводки 8 при помощи шарнира 10, кулисы 9 и пальцев 7 введут рейки 5 в непосредственное зацепление с центральной шестерней 13 Механизм снова будет зафиксирован фиксатором 17 в положение прямого хода,
Длина поводков 8, место установки кулисы Э и шарнира 10 на водила 11 , угол его поворота вокруг оси выходного вала 1, а также соотношение диаметров ведущей шестерни 13 и сателлитов 12 и профили кулачков 18 и 19 подбираются в механизме таким образом, чтобы за t время переходных процессов с прямого хода на обратный (или наоборот) между
ленную на валу центральную шестерню соосно установленное с ними водило, оппозитно установленные зубчатые ре ки, имеющие каждая на обращенных од
20 к другому концах кулачки, предназн ченные для взаимодействия с водилом установленные на осях в водиле по . крайней мере два сателлита с возмож ностью постоянного взаимодействия с
25- центральной шестерней и переменного с соответствующими им рейками, и ки матически связанный с водилом фикса тор его углового положения, о т л1 и чающийся тем, что, с целью
30 повышения КПД и снижения потребляем механизмом мощности, в каждой рейке выполнено по направляющему пазу, в корпусе выполнена по крайней мере одна пара направляющих, оси которых параллельны между собой и касательн к делительной окружности центрально шестерни и лежат с нею в одной плос кости, а механизм снабжен ползунами по числу реек, установленными в соо ветствующих направляющих корпусах и ш нирно соединенных с противоположными концами соответствующих реек,установ ленными в корпусе кулисами,поводками числу кулис,установленными каждый в соответствующей кулисе, на одном из
35
40
45
50
концов которых установлено по пальцу предназначенному для взаимодействия с направляющими пазами соответствую щих реек, а другие концы поводков шарнирно закреплены на водиле сателлитов.
0
деталями механизма не было избыточных кинематических связей, т,е вначале происходил вывод зубчатых реек 5 из зацепления для прекращения одного хода, а затем их ввод в таковое для совершения противоположного хода строго по принципу зуб во впадинУ
Формула изобретения
Механизм преобразования возвратно-поступательного движения во вращательное, содержащий корпус, установленные в нем выходной вал, закрепленную на валу центральную шестерню, соосно установленное с ними водило, оппозитно установленные зубчатые рейки, имеющие каждая на обращенных один
к другому концах кулачки, предназначенные для взаимодействия с водилом, установленные на осях в водиле по крайней мере два сателлита с возможностью постоянного взаимодействия с
- центральной шестерней и переменного с соответствующими им рейками, и кинематически связанный с водилом фиксатор его углового положения, о т л1 и - чающийся тем, что, с целью
повышения КПД и снижения потребляемой механизмом мощности, в каждой рейке выполнено по направляющему пазу, в корпусе выполнена по крайней мере одна пара направляющих, оси которых параллельны между собой и касательны к делительной окружности центральной - шестерни и лежат с нею в одной плоскости, а механизм снабжен ползунами по числу реек, установленными в соответствующих направляющих корпусах и шар- нирно соединенных с противоположными концами соответствующих реек,установленными в корпусе кулисами,поводками по числу кулис,установленными каждый в соответствующей кулисе, на одном из
концов которых установлено по пальцу, предназначенному для взаимодействия с направляющими пазами соответствующих реек, а другие концы поводков шарнирно закреплены на водиле сателлитов.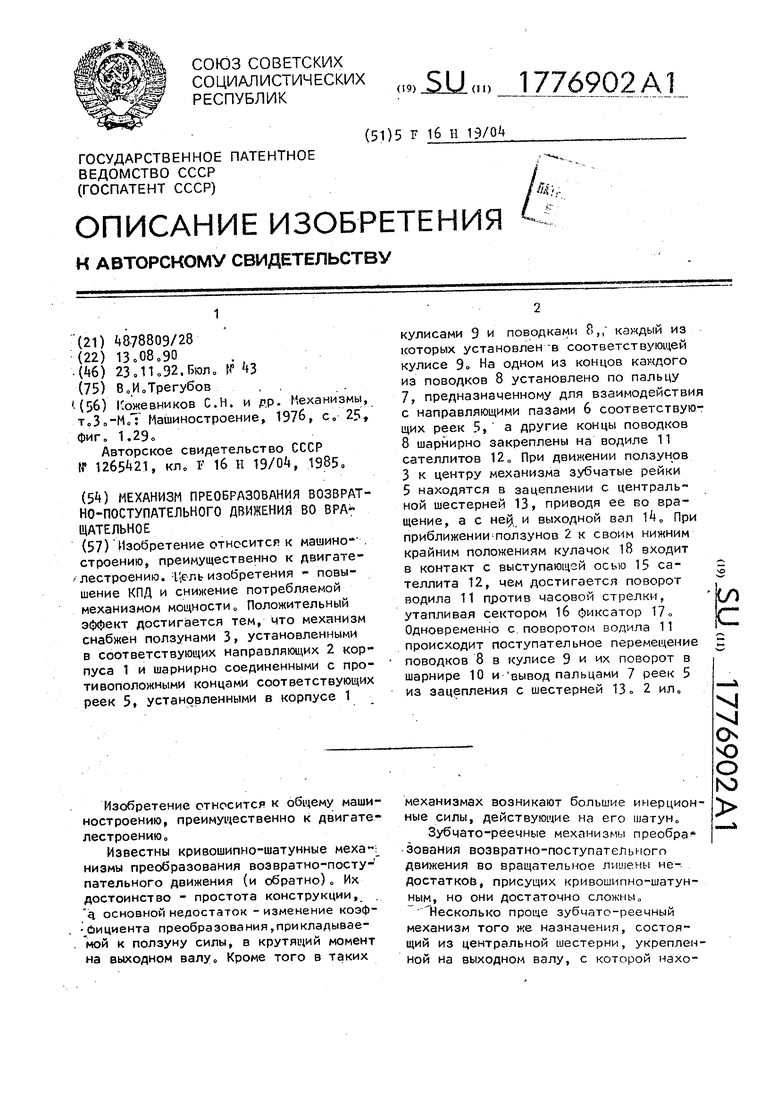
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2237175C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2441994C2 |
| Механизм преобразования возвратно-поступательного движения во вращательное | 1985 |
|
SU1265421A1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2010 |
|
RU2471099C2 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
Изобретение относится к машиностроению, преимущественно к двигате- лестроению. Цель изобретения - повышение КПД и снижение потребляемой механизмом мощности. Положительный эффект достигается тем, что механизм снабжен ползунами 3, установленными в соответствующих направляющих 2 корпуса 1 и шарнирно соединенными с противоположными концами соответствующих реек 5, установленными в корпусе 1 Изобретение относится к общему машиностроению, преимущественно к двигате- лестроению Известны кривошипно-шатунные механизмы преобразования возвратно-поступательного движения (и обратно)„ Их достоинство - простота конструкции, а, основной недостаток - изменение коэффициента преобразования,прикладывае- мой к ползуну силы, в крутящий момент на выходном валу Кроме того в таких кулисами 9 и поводками 8,, камдый из которых установлен в соответствующей кулисе 9 о На одном из концов каждого из поводков 8 установлено по пальцу 7, предназначенному для взаимодействия с направляющими пазами 6 соответствующих реек 5, а другие концы поводков 8 шарнирно закреплены на водиле 11 сателлитов 12„ При движении ползунов 3 к центру механизма зубчатые рейки 5 находятся в зацеплении с центральной шестерней 13, приводя ее во вращение, а с ней и выходной вал 14„ При приближении ползунов 2 к своим нижним крайним положениям кулачок 18 входит в контакт с выступающей осью 15 сателлита 12, чем достигается поворот водила 11 против часовой стрелки, утапливая сектором 16 фиксатор 17 о Одновременно с поворотом водила 11 происходит поступательное перемещение поводков 8 в кулисе 9 и их поворот в шарнире 10 и вывод пальцами 7 реек 5 из зацепления с шестерней 13 2 ил„ механизмах возникают большие инерционные силы, действующие на его шатун„ Зубчато-реечные механизмы преобразования возвратно-поступательного движения во вращательное лишены недостатков, присущих кривошипно-шатун- ным, но они достаточно сложны„ Несколько проще зубчато-реечный механизм того же назначения, состоящий из центральной шестерни, укрепленной на выходном валу, с которой нахо(Л С xj х| о ю о ю
Фиг. /,
Фиг. 2
| Кожевников С.Н т.З.-МоТ Машиностроение, фиг„ 1.29 Авторское свидетельство СССР № 1265421, кл„ F 16 Н 19/04, 1985 и pp | |||
| Механизмы, 1976, с, 25, |
