Изобретение относится к электрическим системам регулирования и может быть использовано для регулирования физических параметров различных объектов.
Цель изобретения - повьплени точности регулирования.
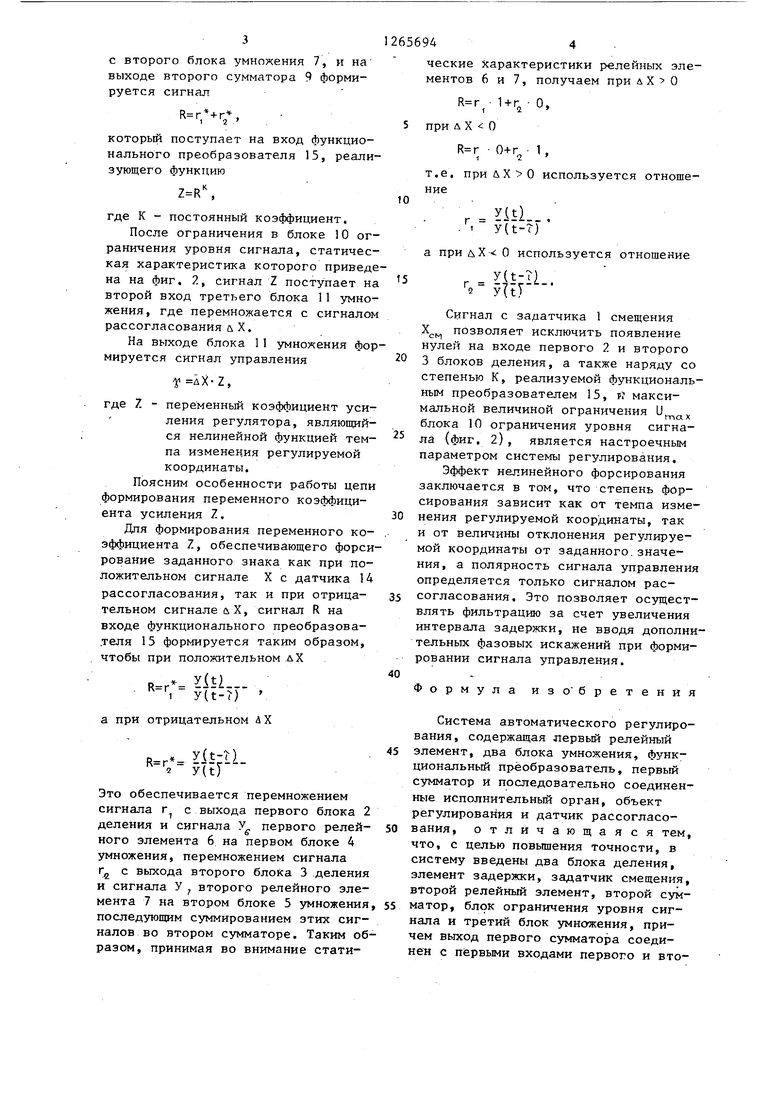
На фиг. 1 приведена блок-схема системы автоматического регулирования; на фиг, 2 - статическая характеристика блока ограничения уровня сигнала.
Система содержит задатчик 1.смещения, первый 2 и второй 3 блоки деления, первый 4 и второй 5 блоки умножения, первый 6 и второй 7 реленые элементы, первый 8 и второй 9 сумматоры, блок 10 -ограничения уровня сигнала, третий блок 11 умножени исполнительньш орган 12, объект 13 регулирования, датчик 14 рассогласования, функциональный преобразовате 15, элемент 16 задержки.
Система работает следующим образом.
Сигнал отклонения замеренного знчения регулируемой координаты X от заданного значения Xj, формируемый датчиком 14 рассогласования согласно выражению ,-Х, через третий блок 11 умножения, где перемножается с перёмеиньш коэффициентом усиления, который формируется на выходе блока 10 ограничения уровня сигнала, поступает на исполнительный орган 12, обеспечивающий изменение регулируемой координаты объекта 13 регулирования в направлении, уменьшающем рассогласование.
Цепь формирования переменного коэффициента усиления работает следующим образом.
.Сигнал рассогласования и X с датчика 14 рассогласования поступает на входы релейных элементов 6 и 7, имеющих, статические характеристики вида
лХ бО, йХ 0
для релейного элемента 6;
лХ 0, X 0
для релейного элемента 7. Сигнал рассогласования X поступает также со знаком минус на первый вход сумматора 8, где суммируется с постоянной величиной Х, формируемой задатчиком 1 смещения, подключенным к второму входу первого сумматора 8. Величина смещения выбирается из условия
,+S,
6 - допустимая величина перерегдегулирования в системе. Таким образом, на выхо,е первого сумматора 8 формируется сигнал
y(t).
который поступает на вход делимого первого блока 2, деления и на вход делителя второго блока 3 деления, а также через элемент 16 задержки на вход делителя первого блока 2 деления и вход делимого второго блока 3 деления. В результате этого на выходе первого блока 2 деления формируется отношение
, y(tL..
1 y(t-r)
а на выходе второго блока 3 деления формируется отношение
г
y(ty
де y(t) - сигнал с вьрсода первого
сумматора 8 в текущий момент времени;
y(t-i) - сигнал с выхода первого сумматора 8, пропущенный через элемент 16 задержки, т.е. сигнал, сдвинутый во времени на величину Т , определяемую настройкой элемента 16 задержки.
Сигналы г, и
г
характеризуют темп
изменения величины У, а следозвательно, и величины рассогласования лX.
После умножения сигнала г на сигнал Уд с выхода первого релейного элемента 6 в первом блоке 4 умно: :ения и умножения г на сигнал У с выхода второго релейного элемента 7 во втором блоке 5 умножения, на первый и второй входы блока 9 суммирования постгшают сигналы
Уб
f, п
с первого блока умножения 6,
с второго блока умножения 7, и на выходе второго сумматора 9 формируется сигнал
который поступает на вход функционального преобразователя 15, реализующего функцию
где К - постоянный коэффициент.
После ограничения в блоке 10 ограничения уровня сигнала, статическая характеристика которого приведена на фиг. 2, сигнал Z поступает на второй вход третьего блока 11 умножения, где перемножается с сигналом рассогласования л X.
На выходе блока 11 умножения формируется сигнал управления
.Z,
где Z - переменный коэффициент усиления регулятора, являющийся нелинейной функцией темпа изменения регулируемой координаты.
Поясним особенности работы цепи формирования переменного коэффициента усиления Z.
Дпя формирования переменного коэффициента Z, обеспечивающего форсирование заданного знака как при положительном сигнале X с датчика 14 рассогласования, так и при отрицательном сигнале лХ, сигнал R на входе функционального преобразователя 15 формируется таким образом, чтобы при положительном дХ
R..- y(t-n
а при отрицательном л X
y(t-L).
y(ty
2
Это обеспечивается перемножением сигнала г с выхода первого блока 2 деления и сигнала У первого релейного элемента 6 на первом блоке 4 умножения, перемножением сигнала г с выхода второго блока 3 .деления и сигнала У , второго релейного элемента 7 на втором блоке 5 умножения, последующим суммированием этих сигналов во втором сумматоре. Таким образом, принимая во внимание статические характеристики релейных элементов 6 и 7, получаем при лХ О
,- О, при д X О
1,
т.е. при Л используется отношение
г . . 1 ylt-T)
а придХ- ;0 используется отношение г .
2 y(t)
Сигнал с задатчика 1 смещения позволяет исключить появление нулей на входе первого 2 и второго
3 блоков деления, а также наряду со степенью К, реализуемой функциональным преобразователем 15, г максимальной величиной ограничения U блока 10 ограничения уровня сигнала (фиг. 2), является настроечным параметром системы регулирования.
Эффект нелинейного форсирования заключается в том, что степень форсирования зависит как от темпа изменения регулируемой координаты, так и от величины отклонения регулируемой координаты от заданного.значения, а полярность сигнала управления определяется только сигналом рассогласования. Это позволяет осуществлять фильтрацию за счет увеличения интервала задержки, не вводя дополнительных фазовых искажений при формировании сигнала управления.
Формула изобретения
Система автоматического регулирования, содержащая лервый релейный
элемент, два блока умножения, функциональный преобразователь, первый сумматор и последовательно соединенные исполнительный орган, объект регулирования и датчик рассогласования, отличающаяся тем, что, с целью повыщения точности, в систему введены два блока деления, элемент задержки, задатчик смещения, второй релейный элемент, второй сумматор, блок ограничения уровня сигнала и третий блок умножения, причем выход первого сумматора соединен с первыми входами первого и вто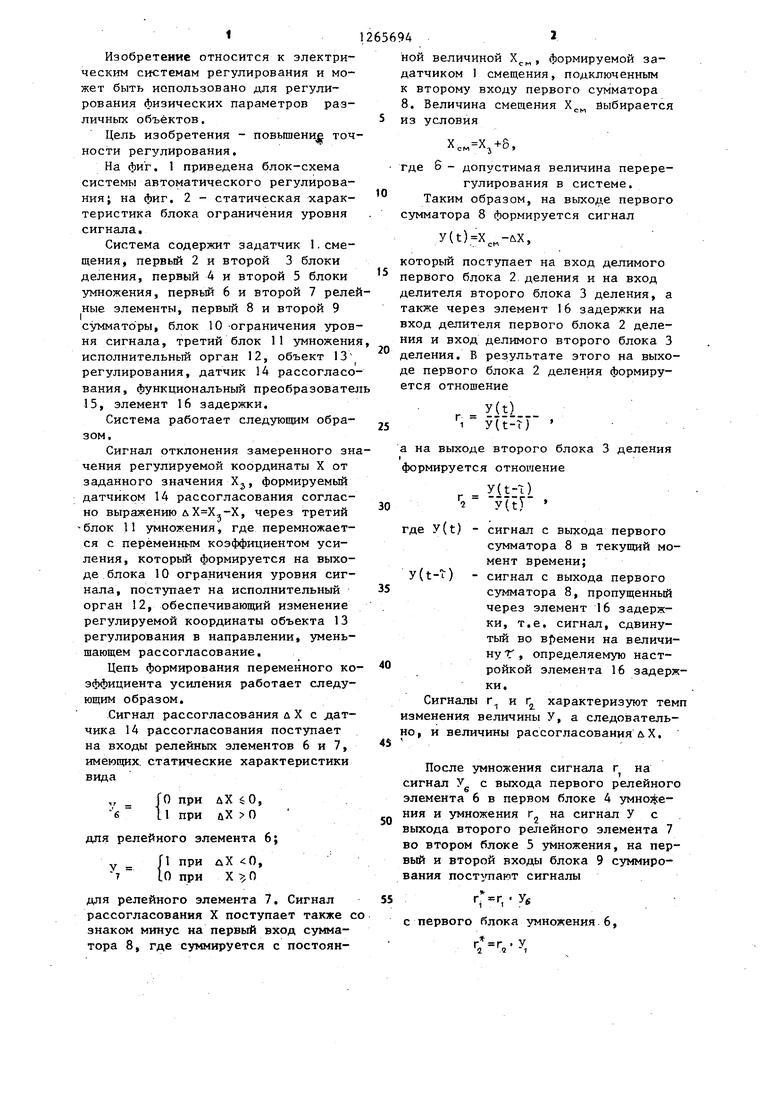
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1984 |
|
SU1234808A1 |
| Нелинейный корректирующий фильтр | 1985 |
|
SU1497607A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2604555C1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2615940C1 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2821977C2 |

Изобретение относится н элект- : рическим системам регулирования и может быть использовано для регулирования физических параметров различных объектов. Целью изобретения является повьппение точности регулирования. Система автоматического регулирования содержит задатчик смещения, два блока деления, три блока умножения, два релейных элемента, два сумматора, блок ограничения уровня сигнала, исполнительный орган, объект регулирования, датчик рассогласования, функциональный преобразователь и элемент задержки. Соединенные в соответствии с поставленной задачей указанные узлы позволяют достичь цели, используя эффект нелинейного формирования, который заключается в том, что степень форсирования зависит как от темпа изменения регулируемой координаты, так и от веi личины ее отклонения от заданного (Л значения, а полярность сигнала управления определяется только сигналом рассогласования. Это позволяет осуществить фильтрацию за счет увеличения интервала задержки, не вводя дополнительных фазовых искажений при формировании сигнала управN9 ления. 2 ил. С СП о со 42)ь
| Интегральные системы автоматического управления силовыми установками самолетов | |||
| /Под ред | |||
| А.А.Шевякова | |||
| - М.: Машиностроение, 1983, с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| рис, 5.23 | |||
| Нелинейные корректирующие устройства в системах автоматического управления | |||
| /Под ред | |||
| Ю.И.Топчеева | |||
| М.: Машиностроение, 1971, с, 110 | |||
