Изобретение относится к области приборостроения и средств автоматики и может найти широкое применение при регулировании температуры парогене- раторных установок при наличии помех высокого уровня.
Целью изобретения является повьпце- ние точности системы.
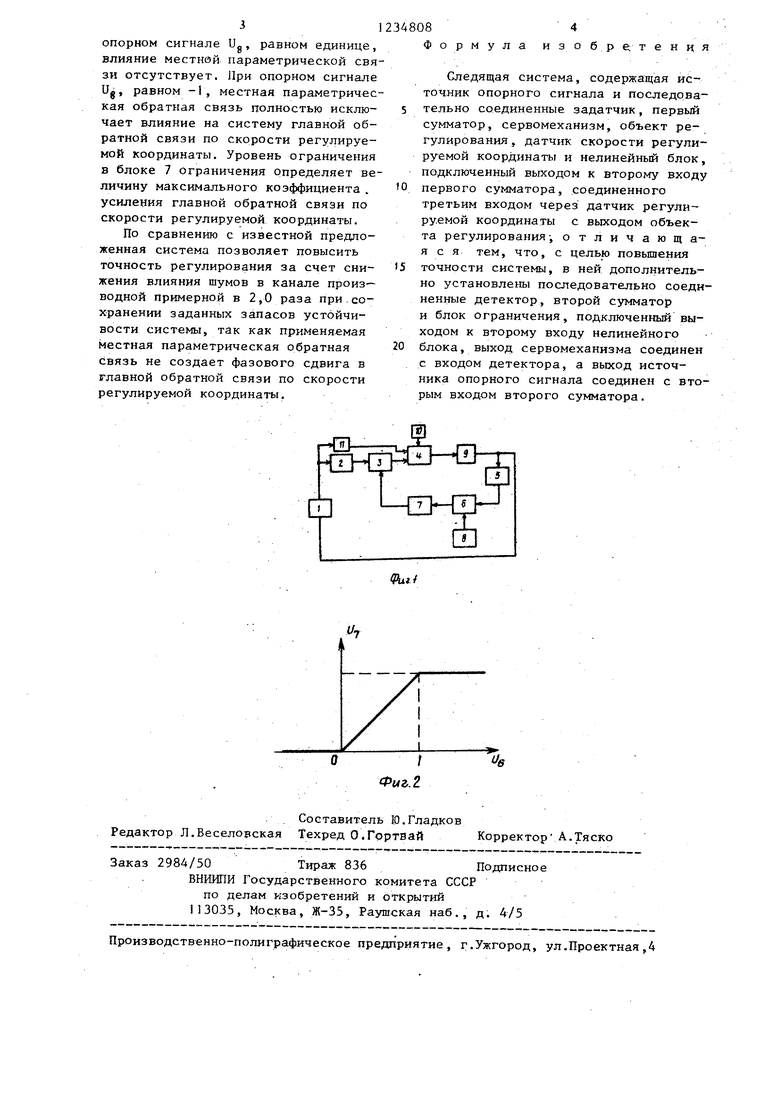
На фиг.1 представлена структурная схема системы; на фиг..2 - характерис тика блока ограничения,
Система содержит объект 1 регулирования, датчик 2 скорости регулируемой координаты, нелинейный блок 3, первый сумматор 4, детектор 5, второй сумматор 6, блок 7 ограничения, источник 8 опорного сигнала , сервомеханизм 9, задатчик Ю, датчик 11 регулируемой координаты,
В качестве детектора 5 может быть применен, например, линейный детектор с характеристикой типа выделение модуля.
В качестве нелиней1гого блока 3 может быть использован, например, блок умножения.
Сервомеханизм 9 может состоять, например, из регулирующего блока, регулирующего пропорционально-ин- тегрально-дифференциальный закон регулирования, и исполнительного механизма.
Система работает следующим образом.
Сигнал Ц, , пропорциональный текущему значению регулируемой координаты X с выхода датчика 1) регулируемой координаты поступает на тре- .тий вход сумматора 4. Сигнал U, , пропорциональный скорости X изменения регулируемой координаты, с выхода датчика 2 скорости регулируемой координаты проходит через нелинейный блок 3 и поступает на второй вход сумматора 4. Выходной сигнал задатчика 10 поступает на первый вход сумматора 4 В сумматоре 4 все его выходные сигналы алгебраически суммируются со своими весовыми коэффициентами, и результирующий сигнал с выхода сумматора 4 поступает на вход сервомеханизма 9, который воздействует на объект I регулирования таким образом, чтобы обеспечить равенство текущего и заданного значений регулируемой координаты. Кроме того, выходной сигнал сервомеханизма 9 поступает на вход детектора 5, в котором осутествляется
5
0
выделение модуля его входного сигнала. Выходной сигнал детектора 5 поступает на вход второго сумматора 6, в котором суммируется с выходным сигналом источника 8 опорного сигнала. / Выходной сигнал сумматора 6 ограничивается в блоке 7 ограничения, выходной сигнал и которого подается на второй вход нелинейного блока 3. На выходе нелинейного блока 3 формируется сигнал Uj вида
и, и,-и,,
где и, - выходной сигнал датчика 2
скорости регулируемой координаты;и . - выходной сигнал блока 7 ог- /
раничения. Из этого выражения следует, что
5
0
5
0
сигнал Uj поступающий на третий вход сумматора 4, зависит как от сигнала и, , пропорционального величине ско- . рости изменения регулируемой координаты Xi так и от выходного сигнала блокс 7 ограничения, т.е. от местной параметрической обратной связи, состоящей из блока 7 ограничения, второго сумматора 6, источника 8 опорного сигнала и детектора 5. При нормированном сигнале управления U , формируемом на выходе сервомеханизма 9 и изменяющемся в пределах от +1 до -t при нулевом смещении, на третий вход сумматора 4 поступает некоторая доля выходного сигнала 1. датчика скорости регулируемой координаты, изменяющаяся в диапазоне О - 100% в зависимости от величины выходного сигнала и, блока ограничения 7. Таким .образом, осуществляется модуляобеспеция сигнала U сигналом и, чиваюп ая отключение сигнала
и.
в те
моменты времени, когда сигнал управления Uj на выходе сервомеханизма 9 близок или равен нулевому значению, т.е. в те моменты, когда сигнал помехи становится соизмеримым с полезным сигналом на входе системы.
Величина опорного сигнала Ug, формируемого источником 8 опорного сигнала,.-И уровень ограничения, задаваемый в блоке 7 ограничения, являются настроечными параметрами, определяющими степень влияния местной параметрической обратной связи на главнуто обратную связь по скорости регулируемой координаты. При уровне ограничения„ равном единице, и при
3
опорном сигнале Ug, равном единице, влияние местной параметрической связи отсутствует. При опорном сигнале Uj, равном -I, местная параметрическая обратная связь полностью исключает влияние на систему главной обратной связи по скорости регулируемой координаты. Уровень ограничения в блоке 7 ограничения определяет величину максимального коэффициента . усиления главной обратной связи по скорости регулируемой координаты.
По сравнению с известной предложенная система позволяет повысить точность регулирования за счет снижения влияния шумов в канале произ-- водной примерной в 2,0 раза при.сохранении заданных запасов устойчивости системы, так как применяемая Местная параметрическая обратная связь не создает фазового сдвига в главной обратной связи по скорости регулируемой координаты.
348084
Формула изобре:тени. я
Следящая система, содержащая источник опорного сигнала и последрва- 5 тельно соединенные задатчик, первый сумматор, сервомеханизм, объект регулирования, датчик скорости регулируемой координаты и нелинейный блок, подключенный выходом к второму входу
О первого сумматора, соединенного
третьим входом через датчик регулируемой координаты с выходом объекта регулирования-, отличающаяся тем, что, с целью повышения
(5 точности системы, в ней дополнительно установлены последовательно соединенные детектор, второй сумматор и блок ограничения, подключенный выходом к второму входу нелинейного
20 блока, выход сервомеханизма соединен с входом детектора, а выход источника опорного сигнала соединен с вторым входом второго сумматора.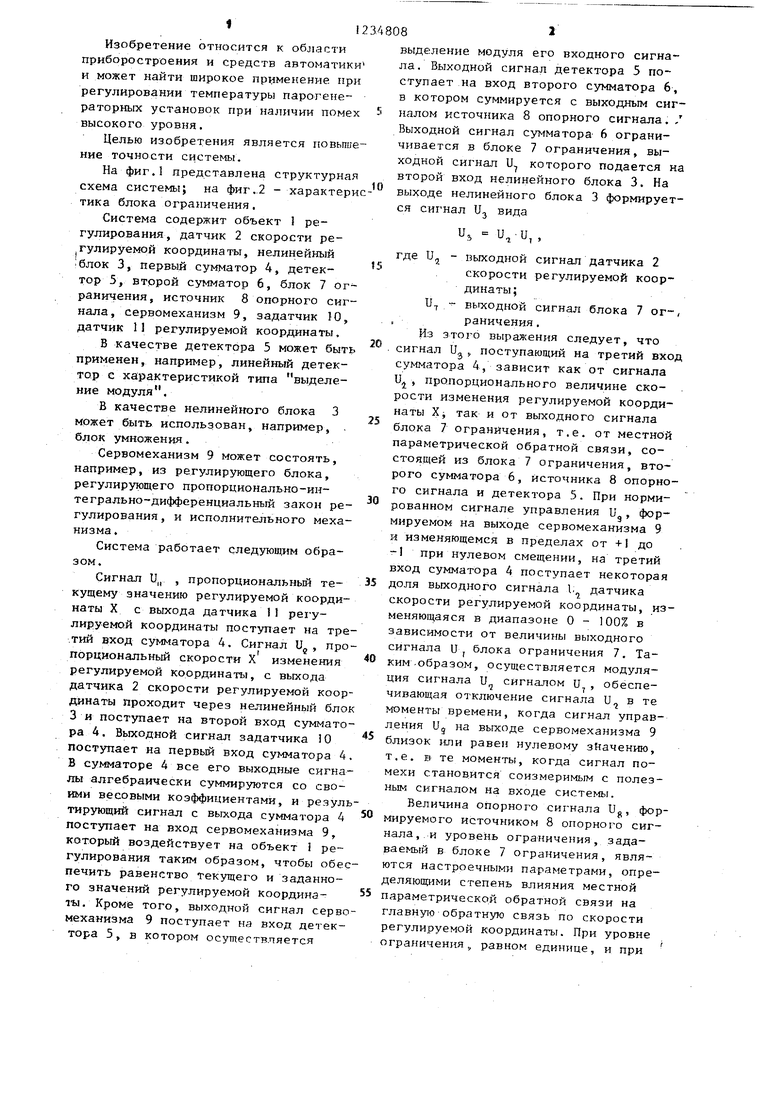
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1984 |
|
SU1216773A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Частотно-регулируемый синхронный электропривод | 1983 |
|
SU1107242A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Система регулирования скорости | 1984 |
|
SU1229727A1 |
| Система автоматического регулирования | 1985 |
|
SU1265694A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
Система относится к области приборостроения и средств автоматики и может найти широкое применение при регулировании температуры парогене- раторных установок при наличии помех высокого уровня. Повышение точности системы достигается за счет введения местной параметрической связи для управления главной обратной связью по скорости регулируемой координаты. Выходные сигналы задатчика и датчика регулируемой координаты поступают на первый и третий входы первого сумматора. Выходной сигнал датчика сяорос- ти регулируемой координаты поступает на второй вход первого сумматора через нелинейный блок. В сумматоре его выходные сигналы алгебраически суммируются со своими весовыми коэффициентами, а полученный результирующий сигнал подается на вход сервомеханизма. Сервомеханизм, регулирующий блок которого реализует ПИД-закон регулирования, воздействует на объект регулирования так, чтобы уменьшить сигнал рассогласования. Кроме того, выходной сигнал сервомеханизма через линейный детектор поступает на первый вход второго сумматора, в котором - суммируется с опорным сигналом. Выходной сигнал второго сумматора ограничивается в блоке ограничения и поступает на второй вход нелинейного блока, в качестве которого может быть использован блок умножения. 2 кп. с tC (Л с to со 4;: 00 о оо
. Составитель Ю.Гладков Редактор Л.Веселовская Техред О.Гортвай Корректор А.Тяско
Заказ 2984/50 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная ,4
| УСТРОЙСТВО для УПРАВЛЕНИЯ | 0 |
|
SU302695A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 0 |
|
SU356625A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1972 |
|
SU463095A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
