4 СО Ч
Од
| название | год | авторы | номер документа |
|---|---|---|---|
| Автокорреляционный измеритель параметров псевдослучайного фазоманипулированного сигнала | 1990 |
|
SU1823137A1 |
| Устройство для измерения симметричных составляющих напряжений трехфазной сети | 1990 |
|
SU1781642A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| АВТОКОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ПСЕВДОСЛУЧАЙНОГО ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА | 1990 |
|
RU2011299C1 |
| Устройство управления параметрами газовой среды | 1985 |
|
SU1309003A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТА | 1994 |
|
RU2103718C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА АНАЛОГОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2106747C1 |
| Цифровой измеритель коэффициента гар-МОНиК | 1979 |
|
SU805195A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
Нелинейный корректирующий фильтр, содержащий последовательно соединенные первый блок задержки, первый блок умножения, детектор, второй блок умножения, блок извлечения корня, второй блок задержки реле, усилитель и первый сумматор, подключенный вторым входом к выходу второго блока задержки, а выходом - к второму входу второго блока умножения, а также третий блок умножения, соединенный входами и выходами блока извлечения корня и блок сигнатуры, и последовательно соединенные К умножителей, причем выход последнего из них подключен к второму входу первого блока умножения, а вход сигнатуры и выход третьего блока умножения являются входом и выходом фильтра, отличающийся тем, что, с цель повышения эффективности фильтра, в нем дополнительно установлены (К+1) суммирующих усилителей и второй сумматор, подключенный первым входом к выходам первого блока задержки и блок сигнатуры, вторым входом к выходу первого блока задержки и первым входам суммирующих усилителей, а выходом - к вторым входам суммирующих усилителей, выход первого суммирующего усилителя соенинен с первым входом первого умножителя, а выход каждого I-го суммирующего усилителя, начиная с второго, соединен с вторым входом (I-1)-го умножителя.
Изобретение относится к техническим средствам коррекции систем автоматического регулирования и может найти применение в системах управления силовыми установками горнодобывающей техники.
Целью изобретения является повышение эффективности фильтра.
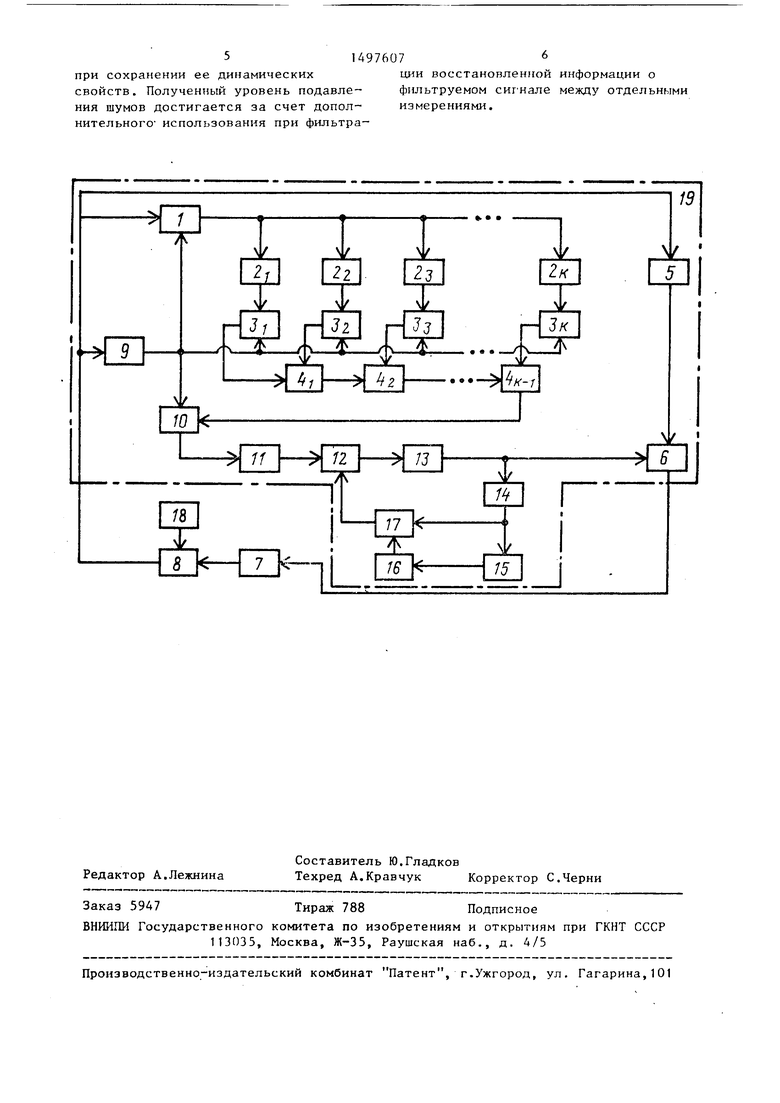
На чертеже приведена функциональная схема предлагаемого фильтра.
На чертеже обозначены: I - второй сумматор; 2 - масштабирующие элементы; 3 - суммирующие усилители; 4 умножители; 5 - блок сигнатуры; 6 - третий блок умножения; 7 - объект регулирования; 8 - датчик рассогласования; 9 - первый блок задержки; 10 - первый блок умножения; 11 - детектор; 12 - второй блок умножения; 13 - блок извлечения корня; 14 - второй блок задержки; 15 - реле; 16 - усилитель; 17 - первый сумматор; 18 - задатчик; 19 - нелинейный корректирующий фильтр,
В качестве детектора 11 может быть применен двухтактный детектор.
Фильтр работает следующим образом.
3149
Сигнал рассогласоьания между заданным и фактическим значениями регулируемой величины с выхода датчика 8 рассогласования поступает на вход первого блока 9 задержки, на первый вход второго сумматора I и на вход блока 5 сигнатуры. Выходной сигнал первого блока 9 задержки поступает на первый вход первого блока 10 умножения, а также на второй вход второго сумматора 1, где вычитается из сигнала, поступающего с выхода датчика 8 рассогласования. Кроме того, выходной сигнал первого блока 9 за- держки поступает на первые входы суммирующих усилителей 3, на вторые входы которых поступает выходной сигнал второго сумматора 1 .
На выходах суммируюгдих усилителей 3 формируются сигналы вида 1
Ui
и -ь
(к+Т)
где Y ;.,
и
где Un - выходной сигнал первого бло
ка 9 задержки;25
и - выходной сигнал второго сумматора 1 ;
1 - номер суммирующего усилителя
3;
(К+1) - число суммирующих усилите- 30
лей;
причем масштабирование выходного сигнала второго сумматора 1 может происходить как непосредственно в самих суммирующих усилителях 3, реапизован-35 ных, например, на базе операционных усилителей, так и с помощью масштабирующих элементов 2.
Выходные сигналы суммирующих усилителей 3 поступают на входы последова-40 тельно соединенных умножителей 4. На выходе последнего К-го умножителя реализуется сигнал вида W л,.,,,Х, где W - вкгходмой с-игиал К-го умножи-45 нала.
теля 4; X. - выходные сигналы суммирующих
усилителей 3.
Выходной сигнал К-го умножителя поступает на второй вход первого блока 50 , 10 умножения, где перемножается с выходным сигналом первого блока 9 задержки. Выходной сигнал первого блока 10 умножения поступает на вход дегде 7. . - Бькодной сигнал второго б ка 12 умножения; выходной сигнал блока 13 извлечения корня; К+3 и равно количеству со жителей произведения Zj,.
Сигнал Y . с выхода блока 13 изв чения корня через второй блок 14 з держки подается на второй вход сум матора 17, а также пропускается че реле 15. После усиления в усилител 16, имеющем коэффициент усиления А сигнал поступает на первый вход сумматора 17, на выходе которого формируется сигнал Y, равный: у Y.., +U ,
- сигнал на выходе второг
блока 14 задержки; - сигнал на вькоде усилит ля 16; при Y , 0;
и О
при Y j. т 70.
Таким образом, сигнал tf исключ ет формирование на втором входе вт рого блока 12 умножения нулевого с
В третьем блоке 6 умножения сиг лу Y. путем умножения его на выход ной сигнал блока 5 сигнатуры присв вается знак сигнала рассогласовани
Выходной сигнал третьего блока 6 умножения является выходным сигн лом нелинейного корректирующего.фи ра.
Предлагаемый фильтр по сравнени
тектора 11. Выходной сигнал детекто- 55 прототипом позволяет в 1,7 раза
повысить эффективность фильтрации (среднеквадратическое отклонение р гулируемого параметра от программы в замкнутой системе регулирования
ра 11 поступает на первый вход второго блока 12 умножения, на второй вход которого поступает сигнал с выхода первого сумматора 17.
Р.
(к где
где Y ;.,
и
нала.
На выходе второго блока 12 умножения сигнал Z имеет виц Z,/c/ ,,. W./ Y; /,,Х,....Х, if X, Ц4,); / Y ,
,- выходной сигнал первого
блока 9 задержки; X. - выходные сигналы умножителей 3;
выходной сигнал первого сумматора 17;
номер соответствующего сумирующего усилителя 3. Выходной сигнал второго блока 12 умножения поступает на вход блока 13 извлечения корня, где реализуется преобразование
г-- Y, V ,
где 7. . - Бькодной сигнал второго блока 12 умножения; выходной сигнал блока 13 извлечения корня; К+3 и равно количеству сомнжителей произведения Zj,.
Сигнал Y . с выхода блока 13 извлечения корня через второй блок 14 задержки подается на второй вход сумматора 17, а также пропускается чере реле 15. После усиления в усилителе 16, имеющем коэффициент усиления А, сигнал поступает на первый вход сумматора 17, на выходе которого формируется сигнал Y, равный: у Y.., +U ,
- сигнал на выходе второго
блока 14 задержки; - сигнал на вькоде усилителя 16; при Y , 0;
Y. и О
при Y j. т 70.
Таким образом, сигнал tf исключает формирование на втором входе второго блока 12 умножения нулевого сиг
нала.
В третьем блоке 6 умножения сигналу Y. путем умножения его на выходной сигнал блока 5 сигнатуры присваивается знак сигнала рассогласования.
Выходной сигнал третьего блока 6 умножения является выходным сигналом нелинейного корректирующего.фильтра.
Предлагаемый фильтр по сравнению
прототипом позволяет в 1,7 раза
повысить эффективность фильтрации (среднеквадратическое отклонение регулируемого параметра от программы) в замкнутой системе регулирования
51497607
при сохранении ее динамическихции восстановленной информации о
свойств. Полученный уровень подавле- фильтруемом сиг нале между отдельными ния шумов достигается за счет допол- измерениями, нительного использования при фильтра
| Авторское свидетельство СССР № 3562204/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР 3754525/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
