Изобретение относится к автоматическому регулированию и управлени и предназначено для автоматического управления свободными колебаниями линейных динамических объектов, параметры которых меняются произвольным неконтролируемым образом в любых ограниченных пределах.
Рассматривается объект управления динамика которого описывается урав нением
y(t) + a(t) (t) , ..., +
+ a,(t)J (t) u(t ), где О:; (t) (i 1, . . ., n) - неизмеряемые параметры объекта, диапазоны изменения которых известны al a-(t) aj
(i Г, ..., п),
- известные константы.
где а.
Задача управления состоит в устранении ОЕшбки регулированияJ определяемой соотношением x(t) y5(t) - y(t),
где y(t) const - задающее воздействие, далее
y(t) 0, при произвольном начальном состоянии системы и обеспечении в асимптотике независимости свойств управляемых процессов x(t) в замкнутой системе от параметров объектов управления a(t) (i 1, ,.., n).
Известна самонастраивающаяся система, состоящая из объекта управления, сумматоров, блоков.сравнения, усилителей, дифференциаторов, Змножителей, релейного и модульных элементов и корректирующего звена 1.
Недостатками этой системы являются низкая надежность, наличие высокочастотных колебаний сигнала управления, высокая чувствительность к помехам и неидеальностям в реализации элементов системы.
Наиболее близкой по технической сущности к предлагаемой является бинарная система автоматического управления с координатно-параметрической обратной связью, содержащая последовательно соединенные объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока
сравнения через соответствующие вторые усилители-соединены с входом . второго сумматора и через соответствующие последовательно соединенные модульные элементы и первые усилители - с входами первого сумматора, выход которого соединен с входом умнохдателя, выход второго сумматора подключен к входу релейного элемента, последовательно соединенного с инерционным фильтром, выход которого подключен к второму входу умножителя 2J ,
Недостатком известной системы
является наличие зависимости свойств управляемых процессов от неконтролируемого изменения параметров объекта, что приводит к ухудшению качества переходного процесса.
Цель г- обеспечение независимости свойств управляемых процессов от произвольного изменения параметров объекта и повышение качества переходных процессов.
Поставленная цель достигается
тем, что в бинарную систему управления, содержащую последовательно соединенные объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход с входами дифференциаторов, выходы которых и выход блока сравнения через соответствующие вторые усилители соединены с входом второго сумматора и через соответствующие последовательно соединенные модульные элементы и первые усилители - с входами первого сумматора, выход которого соединен с входом умножителя,
выход второго сумматора подключен к входу релейного элемента, последовательно соединенного с инерционным фильтром, выход которого подключен к второму входу умножителя, введены
последовательно соединенные блок деления, усилитель с насыщением и третий сумматор, выход которого соединен с входом объекта управления , а вход - с выходом умнозкителя,
первым входом подключенного к входу блока деления (делитель), вто- рой вход которого (делимое), подключен к выходу второго сумматора.
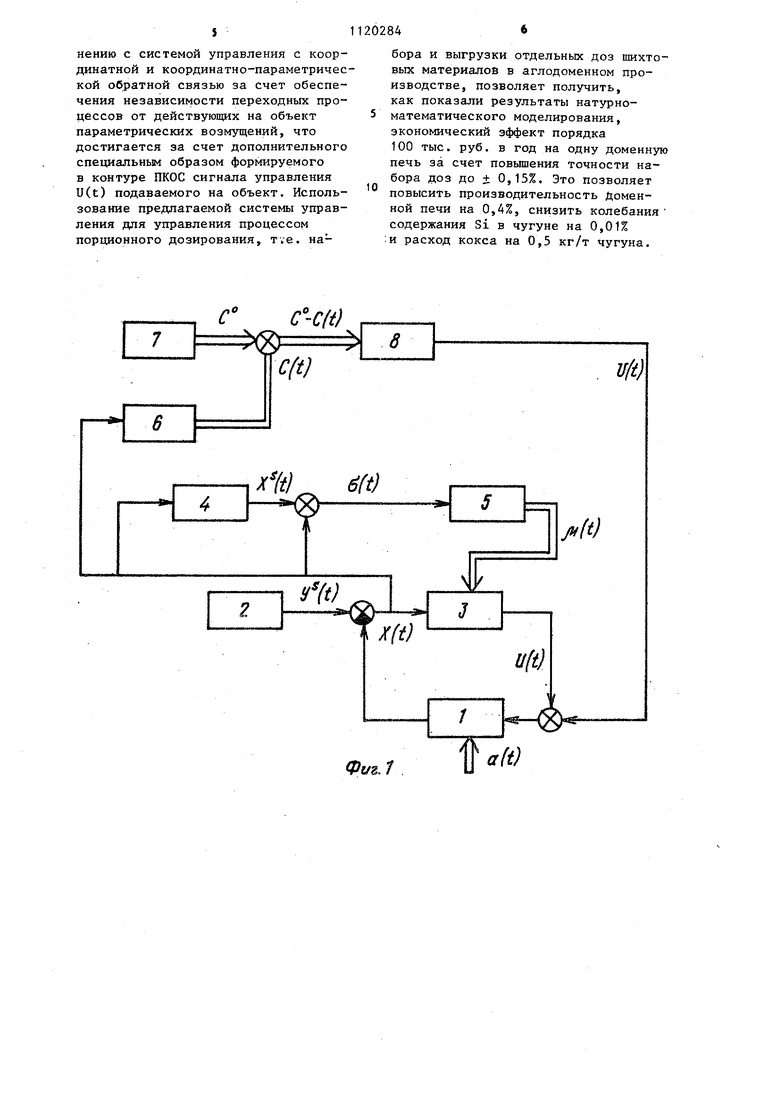
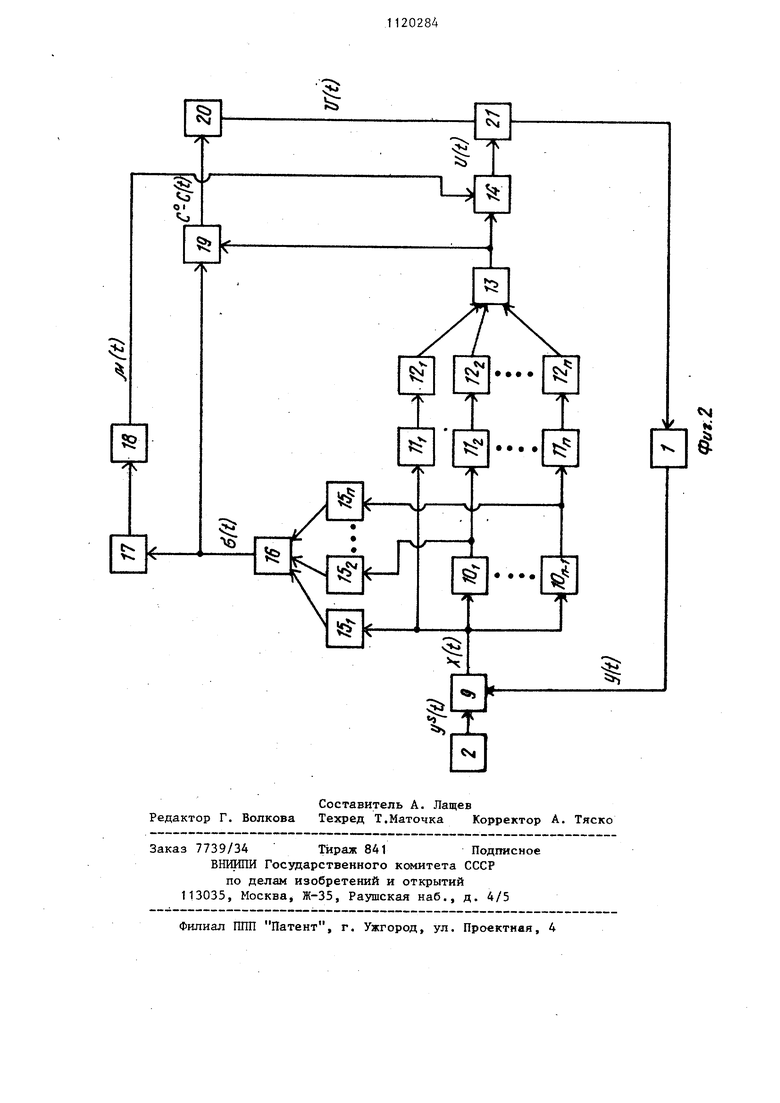
На фиг. 1 представлена структурная схема системы управления; на .фиг. 2 - то же с координатной, координатно-параметрической и параметро-координатной обратными связями. 3 Система управления (фиг. 1) сос тоит из объекта 1 управления, зада чика 2 с выходным сигналом y®(t) const О, регулятора 3 кон тура координатной обратной связи (КОС), формирующего сигнал u(t), задатчика 4 координатно-параметрической обратной связи (КПОС) с выходным сигналом x(t), регулятора 5 контура КПОС, формирующего сигнал (t), функционального блока 6 формирующего сигнал c(t), задатчика 7 контура параметро-координат ной обратной связи (ПКОС) с выходным сигналом С°, регулятора 8 контура ПКОС, формирующего сигнал U(t). При использовании координатнопараметрической обратной связи для рассматриваемого класса объектов получается обобщенная схема с элементами 1-5. В подобных системах при конечных коэффициентах передачи невозможно обеспечить точное выполнение требуемого равенства (5 (t) О и, таким образом, невозможно гарантировать независимость динамических свойств замкнутой сис темы от меняющихся произвольным образом параметров объекта. В связи с этим в систему вводится допол нительно контур параметро-координа ной обратной связи, предназначенны для компенсации возникающего рассогласования между фактической и желаемой динамикой замкнутой систе мы. Задатчик 7 формирует сигнал С задающий желаемые динамические свойства системы, а функциональный блок 6 определяет фактическое пове дение управляемых процессов в замк нутой системе, характеризуемое вел чиной C(t). Регулятор ПКОС-8 предназначен для компенсации рассогласования с - C(t). В результате вв дения ПКОС получается структурная схема, представленная на фиг. 1. Система управления (фиг. 2) содержит объект 1 управления, задатчик 2 КОС, блок 9 сравнения, дифференциаторы 10, Юл, ..., lOfi-i модульные элементы 11, 112, 11f), первые усилители 12, .,., 12, первый сумматор 13, умножител 14, вторые усилители 15, ..., 15,, второй сумматор 16, релейный элемент 17, инерционный элемент 18, 844 блок 19 деления, усилитель 20 с насыщением, третий сумматор 21. Предлагаемая бинарная система функционирует следующим образом. Сигнал yS(t) с выхода задатчика 2 сравнивается с сигналом y(t) с выхода объекта 1 управления в блоке 9 сравнения. Полученный сигнал поступает непосредственно на вход первого юдульного элемента 11/|, а на входы других модульных элементов 11, 11-, ..., llfl- через дифференциаторы соответствуюпщх порядков 10 , 10, ..., 10„., сигналы с выходов модульных элементов через соответствующие первые усилители 12;|, 12, ..., подаются на вход первого сумматора 13, с выхода которого сигнал подается на вход умножителя 14, сигнал с выхода блока 9 сравнения и сигналы с выходов дифференциаторов 10, 102, ) n-1 через соответствующие вторые усилители 15, 15, ..., 15|, подаются на вход второго сумматора 16, полученная на выходе второго сумматора 16 линейная комбинация ошибки x(t) и ее (п-1)-ой производной является ошибкой контура КПОС б (t), она подается на вход релейного элемента 17, а сигнал с выхода релейного элемента 17 подается на вход инерционного элемента 18, выход которого III (t) поступает на второй вход умножителя 14, сигнал с5 (t) с выхода второго сумматора 16 подается на вход делителя 19 (делимое), второй вход которого подсоединен к выходу первого сумматора 13 (делиталь), полученный на выходе блока 19 деления сигнал С - C(t) представляющий собой ошибку контура ПКОС, подается на усилитель 20 с насыщением, сигнал с выхода которого суммируется с сигналом с выхода умножителя 14 в третьем сумматоре 21 и подается на вход объекта 1. В рассмотренной схеме контур ПКОС образуется блоком 19 деления, усилителем 20 с насьщением и сумматором 21 . Технико-экономический эффект предлагаемой бинарной системы управления с координатной координатнопараметрической и параметрической обратными связями заключается в том, что она гарантирует более высокое качество регулирования по сравнению с системой управления с координатной и координатно-параметрической обратной связью за счет обеспечения независимости переходных процессов от действующих на объект параметрических возмущений, что достигается за счет дополнительного специальным образом формируемого в контуре ПКОС сигнала управления U(t) подаваемого на объект. Использование предлагаемой системы управления для управления процессом порционного дозирования, Tve. набора и выгрузки отдельных доз шихтовых материалов в аглодоменном производстве, позволяет получить, как показали результаты натурноматематического моделирования, экономический эффект порядка 100 тыс. руб. в год на одну доменную печь за счет повышения точности набора доз до ± 0,15%. Это позволяет повысить производительность Доменной печи на 0,4%, снизить колебания содержания Si в чугуне на 0,01% :и расход кокса на 0,5 кг/т чугуна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
БИНАРНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно соединенные объект управления и блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения через соответствующие вторые усилители соединены с входом второго сумматора и через соответствующие последовательно соединенные модульные элементы и первые усилители - с входами первого сумматора, выход которого соединен с входом умножителя, выход второго сумматора подключен к входу релейного элемента, последовательно соединенного с инерционным фильтром, выход которого подключен к второму входу з ножителя, -отличающаяся тем, что, с целью повьшения качества переходных процессов системы, она содержит последовательно соедиО) ненные блок деления, усилитель с насьщением и третий сумматор выход которого соединен с входом объекта управления, а вход - с выходом ум- 2 ножителя, подключенного первым входом к первому входу блока деления, второй вход которого подключен к выходу второго сумматопа.
:.Г
Фш
s
Q QOl
ij
€ ч
o
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Соколов Н.И | |||
| Лекции по курсу Теория автоматического регулирования | |||
| Эквивалентные адаптивным и адаптивные САУ | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3613801/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
