ю
0 Од
si
00
Изобретение относится к робототехнике и может быть использовано в качестве модуля линейного перемещения в манипуляторах и промьшшенных роботах.
Целью изобретения является повышение производительности путем увеличения усилия, развиваемого модулем.
На фиг.1 изображен модуль, общий вид; на фиг.2 - вид А на фиг.; на фиг.З - вид Б на фиг.1.
Электромеханический модуль промышленного робота содержит разомкнутое кольцо 1 из электропроводного материала, концы которого закреплены на основании 2, шток 3, связанный с серединой кольца и установленный в основании 2 на направляющих элементах между концами кольца 1, фиксаторы 4 с приводом 5 их перемещения и магнитную систему, включающу,ю три пары полюсов: основных полюсов 6 и двух пар дополнительных полюсов 7 и 8, при этом полюса 6, 7 и 8, расположенные по одну сторону кольца 1, имеют чередующуюся полярность, а шток 3 расположен между полюсами 6 средней пары.
Электромеханический модуль промьшленного робота работает следующим образом.
В исходном положении фиксаторы 4 прижаты к штоку 3, фиксируя его относительно основания. Перед подачей
команды на перемещение штока подается сигнал на приводы 5,. которые отводят фиксаторы 4 от штока 3,, тем самым освобождая его для дальнейших
перемещений.
Затем концы кольца 1 подключаются к источнику электрической энергии (не показан). Ток, проходя по кольцу, взаимодействует с полем, создаваемьм
парами полюсов 6, 7 и 8 магнитной системы. Находясь между разными парами полюсов, различные участки кольца 1 будут испытывать следующие усилия. При усилии, приложенном к средней части кольца I и направленном к его центру, к боковым частям будут приложены усилия, направленные от центра кольца. Наоборот, при изменении направления тока, когда к средней части кольца I будет приложено усилие, направленное от центра, к боковым частям будет приложено сжимающее усилие. Таким образом, боковые участки кольца также участвуют
в создании полезного усилия, направленного на перемещение штока 3, выжимая или втягивая средний участок кольца 1. После отработки заданного перемещения кольцо обесточивается. Подается сигнал на отпускание приводами 5 фиксаторов 4. Фиксаторы 4 прижимаются к штоку 3, фиксируя -его. Модуль готов для совершения следующего перемещения.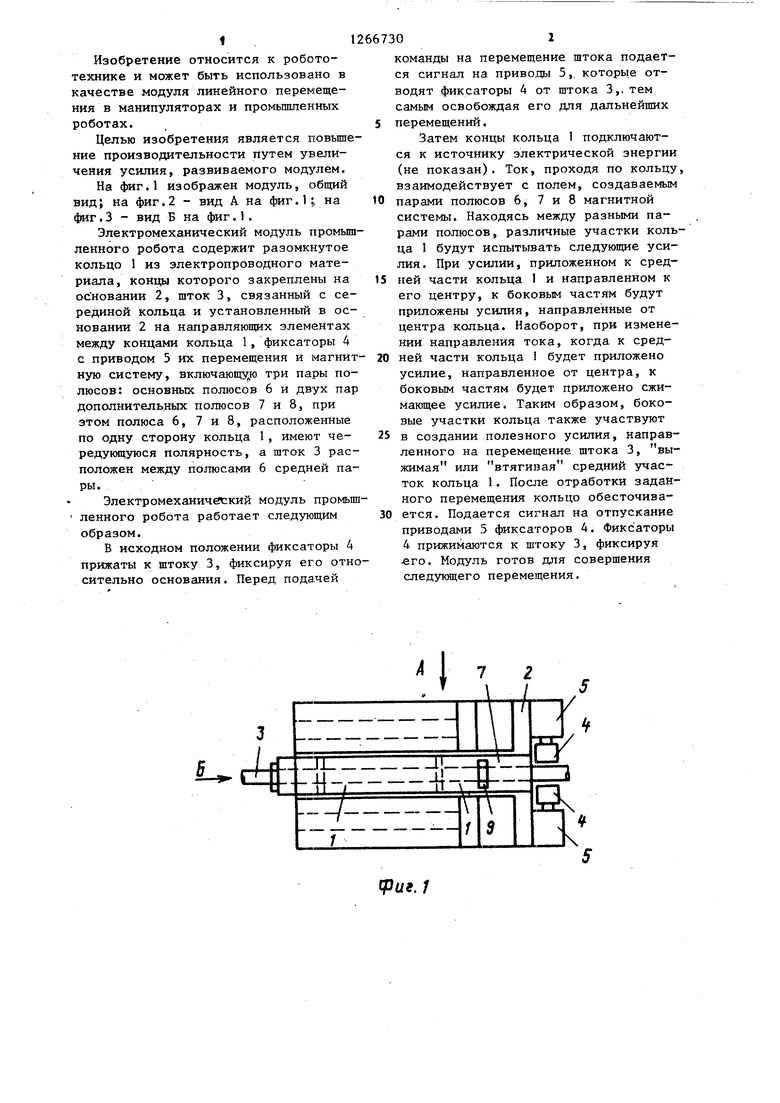
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический модуль промышленного робота | 1984 |
|
SU1274920A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЗАМОК | 2016 |
|
RU2641082C1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО | 1995 |
|
RU2157031C2 |
| ТИХОХОДНЫЙ ГЕНЕРАТОР СТАБИЛИЗИРОВАННЫХ ИМПУЛЬСОВ ПЕРЕМЕННОГО ТОКА СО СТАТОРОМ ИЗ ГЕНЕРИРУЮЩИХ МОДУЛЕЙ И РОТОРОМ С СИСТЕМОЙ УПРАВЛЕНИЯ НА ПОСТОЯННЫХ МАГНИТАХ | 2008 |
|
RU2394337C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО | 1995 |
|
RU2153212C2 |
| Самоустанавливающаяся головка робота | 1983 |
|
SU1103980A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР | 2014 |
|
RU2577527C2 |

ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЬ ПРОМЬШШЕННОГО РОБОТА, содержащий разомкнутое кольцо из электропроводного материала, концы которого закреплены на основании, шток, связанный с серединой кольца и установленный в основании на направляющих элементах между концами кольца, фиксаторы положения штока и магнитную систему с парой основных полюсов, между которыми размещено кольцо, отличающийся тем, что, с целью повьш1ения производительности путем увеличения усилия, создаваемого модулем, магнитная система снабжена двумя парами дополнительных полюсов, при этом полюса, расположенные по одну сторону кольца, имеют чередующуюся полярность, а шток расположен между полюсами средней пары. с 
иг.Г
В ид А
k4i
Mr-V
dHdr - t---f
4f---i:f /
,2
X
/ e
фиг.З
| Схват манипулятора | 1984 |
|
SU1219340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
