б 9 111 1 / / /
/
l
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 2008 |
|
RU2393576C1 |
| Электромеханический модуль промышленного робота | 1984 |
|
SU1266730A1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1993 |
|
RU2115191C1 |
| УПОРНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ | 2013 |
|
RU2533948C2 |
| Привод линейного перемещения | 1984 |
|
SU1253769A1 |
| УСТРОЙСТВО ПРИВОДА КЛАПАНА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2578929C1 |
| Привод робота-манипулятора | 1988 |
|
SU1576308A1 |
| Устройство защиты | 1988 |
|
SU1576928A1 |
| ПОРШНЕВОЙ КОМПРЕССОР С ЭЛЕКТРОДИНАМИЧЕСКИМ ПРИВОДОМ | 1989 |
|
RU2005912C1 |
| Контактная система | 1988 |
|
SU1690008A1 |
ЭЛЕКТРС 1ЕХАНИЧЕСКИЙ МОДУЛЬ ПРШЬШШЕННОГО РОБОТА, содержащий корпус, основное разомкнутое кольцо яз электропроводного материала, концы которого закреплены на основании и связаны с источник(Я4 электрического тока, шток, установленный в направляющих элементах, выполненных в корпусе, и связанный с серединой указанного кольца, механизм фиксации положения штока и магнитную систему с парой полюсов, между которыки размещено это кольцо, отличающийся тем, что, с целью обеспечения надежности и упрощения конструкции, он снабжен дополнительным разомкнутьн кольцом, концы которого закреплены на том же основании, расположенным параллельно основному разомнутому кольцу и электрически параллельно с ним соединенные, а механизм фиксации выполнен 6 виде упругого элемента, установленного меяэду кольцами, пластин с большим коэффициентом трения, установленных на полюсах магнитной системы, и накладок, закрепленных на кольцах со стороны, обращенной к полюсам, при этом шток связан с серединами колец через дополнительно введенную скобу.
fJ / П
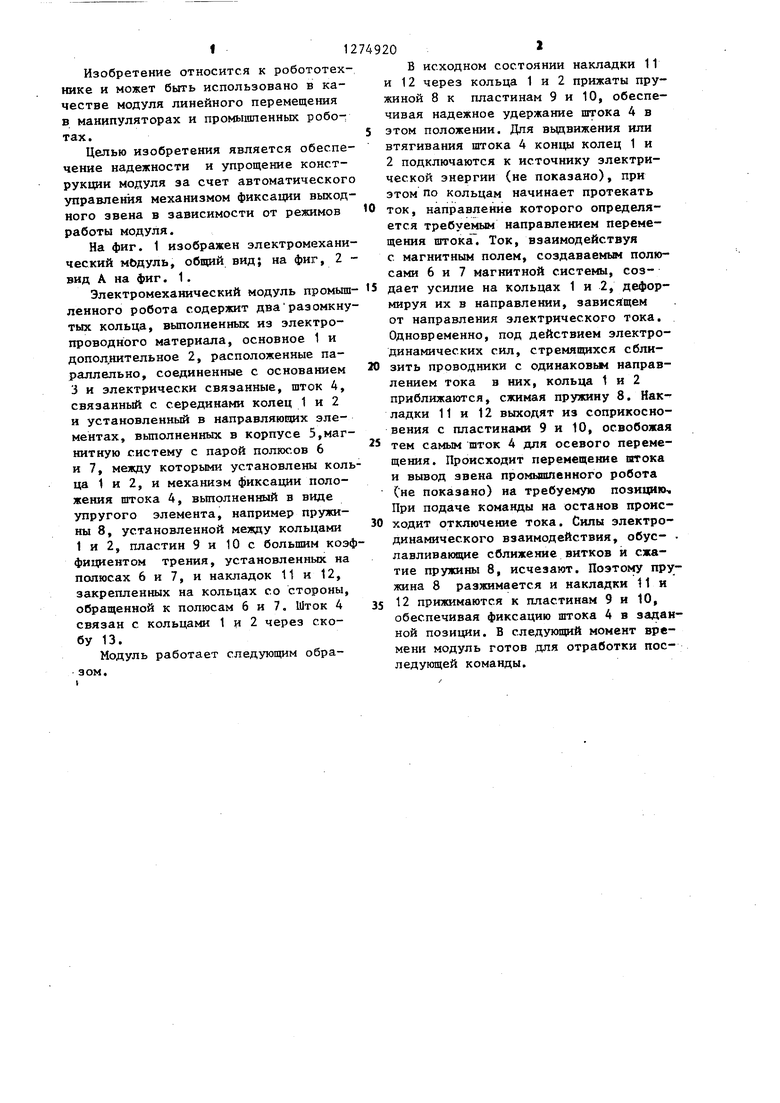
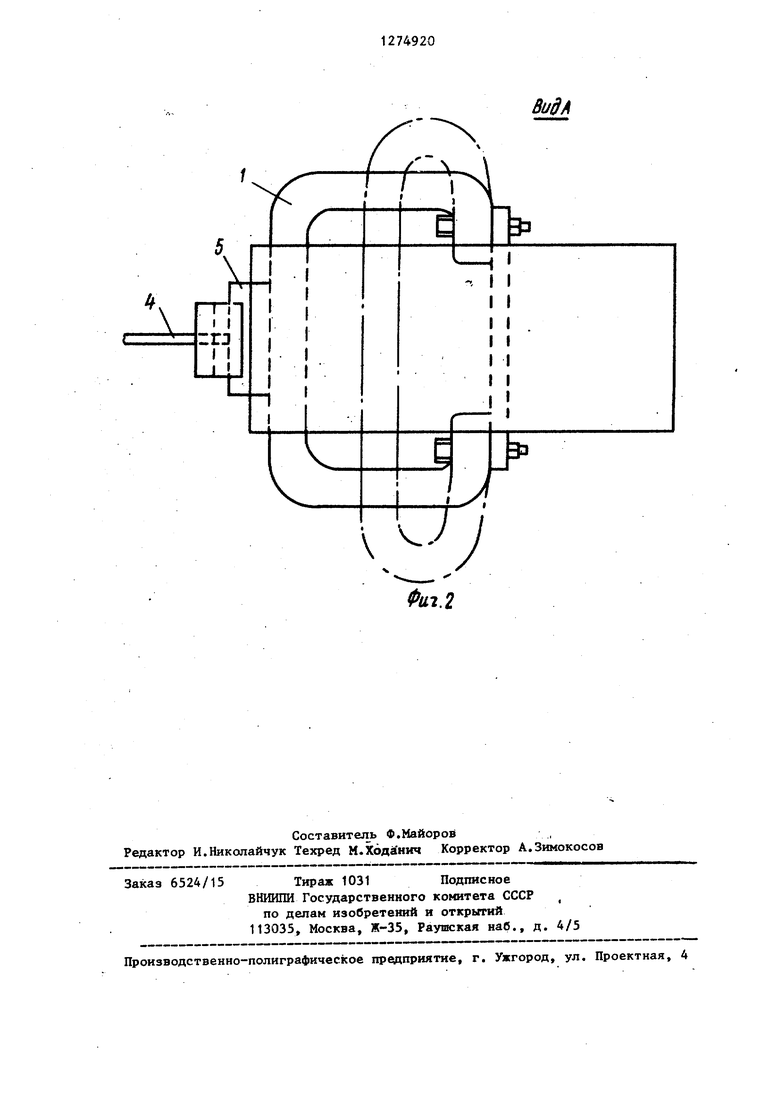
/ iO Фаг.1 Изобретение относится к робототех нике и может быть использовано в качестве модуля линейного перемещения в манипуляторах и промышленньк роботах. Целью изобретения является обеспе чение надежности и упрощение конструкции модуля за счет автоматическог управления механизмом фиксации выход ного звена в зависимости от режимов работы модуля. На фиг. 1 изображен электромехани ческий мЬдуль, обищй вид; на фиг, 2 вид А на фиг. 1. Электромехаиический модуль промыш ленного робота содержит дваразомкну тых кольца, выполненных из электропроводного материала, основное 1 и допол.нительное 2, расположенные параллельно, соединенные с основанием 3 и электрически связанные, шток 4, связанный с серединами колец 1 и 2 и установленный в направляющих элементах, вьтолненных в корпусе 5,магнитную систему с парой полюсов 6 и 7, между которыми установлены кол ца 1 и 2, и механизм фиксации положения штока 4, выполненный в виде упругого элемента, например пружины 8, установленной между кольцами 1 и 2, пластин 9 и 10 с большим коэф фициентом трения, установленных на полюсах 6 и 7, и накладок 11 и 12, закрепленных на кольцах со стороны, обращенной к полюсам 6 и 7. Шток 4 связан с кольцами 1 и 2 через скобу 13. Модуль работает следующим обра зом. 20 В исходном состоянии накладки 11 и 12 через кольца 1 и 2 прижаты пру жиной 8 к пластинам 9 и 10, обеспечивая надежное удержание штока 4 в этом положении. Для выдвижения или втягивания штока 4 концы колец 1 и 2 подключаются к источнику электрической энергии (не показано), при этом по Кольцам начинает протекать ток, направление которого определяется требуемым направлением перемещения штока. Ток, взаимодействуя с магнитным полем, создаваемым полюсами 6 и 7 магнитной системы, создает усилие на кольцах 1 и 2, деформируя их в направлении, зависящем от направления электрического тока. Одновременно, под действием электродинамических сил, стремящихся сблизить проводники с одинаковым направлением тока 3 них, кольца 1 и 2 приближаются, сжимая пружину 8. Накладки 11 и 12 выходят из соприкосновения с пластинами 9 и 10, освобожая тем самым шток 4 для осевого перемещения. Происходит перемещение штока и вывод звена промышленного робота Сне показано) на требуемую позицию, При подаче команды на останов происходит отключение тока. Силы электродинамического взаимодействия, обус- лавливаю цие сближение витков и сжатие пружины 8, исчезают. Пoэтo fy пружина 8 разжимается и накладки 11 и 12 прижимаются к пластинам 9 и 10, обеспечивая фиксацию штока 4 в заданной позиции. В следующий момент времени модуль готов ,цля отработки последующей команды.
Фи1,2
| Схват манипулятора | 1984 |
|
SU1219340A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
