Изобретение относится к робототехнике, а именно к схватам манипуляторов, входящих в технологическую единицу гибкого автоматизированного нроизводства.
Цель изобретения - повьпнение грузоподъемности схвата за счет расширения час- 1 и силового привода непосредственно в зоне захвата.
Па фиг. 1 изобра/кеп манипулятор, об- luiii t вид; па фпг. 2 -- манипулятор со схвато.м, входящий с технологическую еди- пицу гибкого автоматизировап1 ого производства.
Схват содержит корпус 1, на котором н арнирно установлены рычаги 2, подпружиненные пружиной 3, несупше губки 4 и нрпвод перемен1.ения рычагов, выполненпый в виде двух Г-образнь:х магнитных систем 5, которые .чог ут быть выполнены в впде э;1ектром; ,гнитов пли постоянных магнитов, двух петель 6, изготовленных из электро- нрозодно о пластичного материа.ла, закре 1- ленных . концами на корпусе 1, упорои , установ.тениык на Koprivce 1 обе cTopoHi) от j)bi4aroB 2, и двух n.:iai;oK 8, концы которых через тяги 9 свя киим с соответству1оп.,ими рычагами 2. При этом каждая из нетель 6 располо- жена ..у с;н)тветств Ю1цим упором 7 ;i планкой 8, а магнитные системы 5 ус- | ановлены в з(Л1е захвата с нозможност1ло .захода между по. посам - каждой магнитно
0
0
5
системы 5 соответствующей петли 6. Позицией 10 обозначен объект манипулирования, нозицпей 11 - источник электрической энергии, а позицией 12 - оборудование технологического коплекса.
Схват работает следующим образом.
При расположении схвата в рабочей зоне каждая из нетель 6 находится между по.; юсами соответствующей магнитной системы 5 и нри нодключении концов петель 6 к источнику 11 э; ектрической энергии по ним начинает протекать ток. В результате взаимодействия электромагнитного поля витков с магнитным нолем магнитных систем 5 стороны витков, находящихся между упорами 7 и планками 8, раздвигаются, переменная планки 8, и через тяги 9 раздвигаются рычаги 2 схвата. преодолевая усилие схвата пружины 3. При этом происходит освобождение захваченного 10 манипулирования или приведение схвата в исходное состояние перед захватом объекта.
При отключении петель 6 от источника 11 электрической происходит их обесточивание и сведение рыча1 ов 2 юд действием пружины 3, в результате чего об ьект 10 манипулирования зажимается между губками 4 схвата, носле чего он переносится на новое место позиционирования, где новторяется цик.1 работы схвата.
(л}ставит1. Л, Ф. .M.iiKOpoii
Редактор . lIIiiiiiKiiHaТсхре.ч Н. Иорсч.-KoiipuKiDp ДА. С амбс;
Заказ il98f 21Тира ; 11)31)1 lo/iiiiii-iKie
ВНИИПИ Государственного комитета СССР
по делагп изобретений и открытий
113035, Москва, Ж--35, Рауи1ская наб., д. 4/5
Филиал ПГ1П «11ате гг, г. Ужгород, ул. Проектная, 4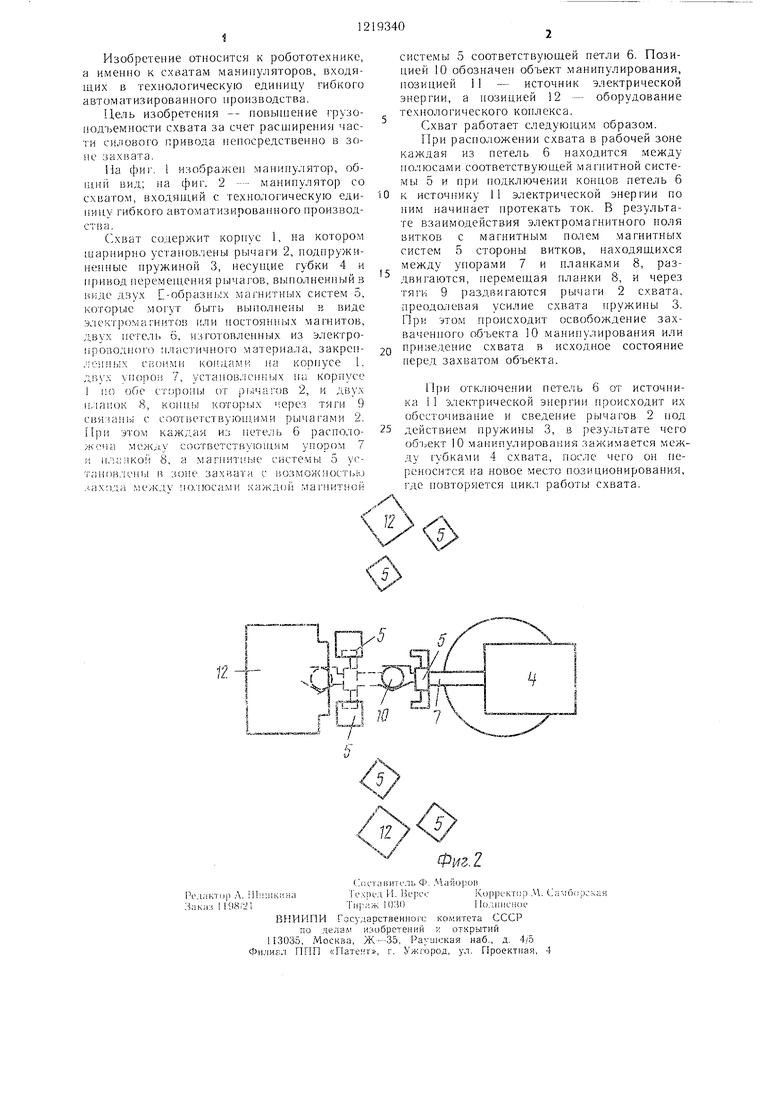
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват манипулятора | 1984 |
|
SU1266736A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Схват манипулятора | 1984 |
|
SU1194675A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Захват манипулятора | 1979 |
|
SU812567A1 |

| Схват руки манипулятора | 1975 |
|
SU585965A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
