а
Oi СП
00
Изобретение относится к электротехнике и может б.ьпь использовано для привода механизмов автоматических манипуляторов, автономных интегральных роботов и т,п„
Целью изобретения является повышение точности регулировани51 скорости ,
На фиг. 1 представлена блок-схема электропривода; на фиг. 2 и 3 схема расположения измерительных обмоток и схема замещения роторной и дополнительной обмоток, соответственно на фиг. 4 - выходные сигна фильтра высокой частоты и амплитудно- 15 и
го демодулятора.
Электропривод nepei-ieHiioio тока содержит асинхронный двигатель с короткозамкнутым ротором с трехфазной силовой и первой измерительной обмотк;гми 1 и 2 на статоре, преобразователь частоты 3 с блоком 4 унравления преобразовательный блок 5 с входаьш и тремя вькодами, элемент 6 сравнения, блок 7 обратной связи. Трехфазная силовая обмотка 1 асинхронного двигателя подключена к выходу преобразователя 3 час.тоты, упраБЛЯю1Щ1й вход которого по/дключен к выходу блока 4 управления, входы которого Г СД1сл:очены к соответствуюш,иь$ выходам преобразовательного блока 5, один вхо/д которого подключен к выходу элемента 6 сравнения, а другой вход - к выходу блока 7 обратной связи, один 13ХОД которого подк.чючен к, од,ному выводу первой измеритео1ыюй
вход элемёнтгг и сравобмотки
нетгля подключен к за. скорости, а другой вхо,1, - к вькоду блока обратной связи,, вторая измерителыгая обмотка 8, генератор 9 высокой ча.стоты, два разделительных резистор.а 10 и 11, блок 7 обратной связи сое.-тавлен из соединенных последовательно фильтра 12 высокой частоты, аы. гшитудного демодулятора 13 и блока 14 вычисле И1я скорости, выход которого является выходом блока 7 обратной связи, двумя входами которого являются входы фильтра 12 высокой, частот), один вывод второй измерительной обмотки 8 соединен с друпп-; выводом первой пзмерительной обмотки 2 и заземлен, другой вывод второй измер1-пел1-ной обмотк;- 8 гсодклночен к другому входу блока 7 обратной связи и через первый раздели-
тельньш резистор 10 к одному выводу генератора 9 высокой частоты, другой вывод которого через второй разделительный резистор 11 Подключен к одному выводу первой измерительной обмотки 2,
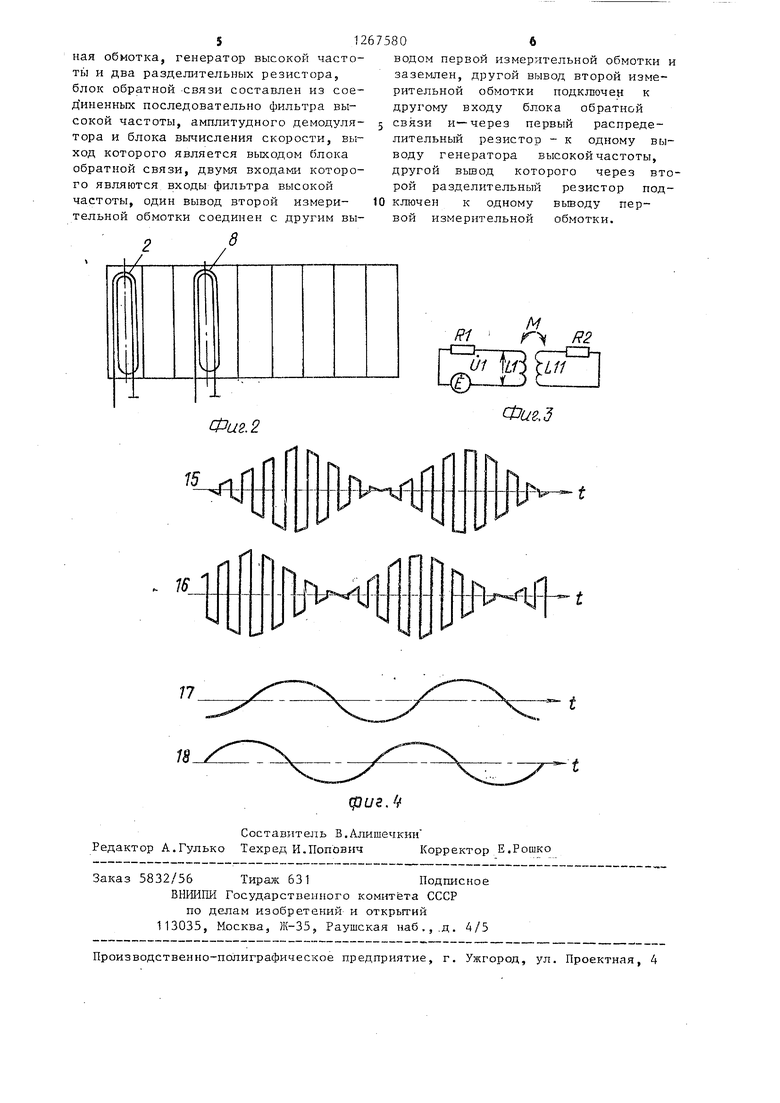
На фиг. 4 приняты следующие обозначения: 15 и 16 - напряжения на выходах фильтра высокой частоты; 17 И 18 - напряжения па выходах амплитудного демодулятора.
Электропривод работает следующим образом.
По сигналу задания скорости сО,
6 сравнения вырабатывает разностный сигнал Ato , который подается на первый вход преобразовательного блока 5, который преобразует ли), а также сигнал LO , подаваемый на его второй ;вход, в совокупность сигналов задания амнлитуды и, частоты л. и фа-зы тока питания статора. По этим сигналам блок 4 управления формирует сигналы управления силовой схемой преобразователя 3, к выходу которого подключены фазы А, В и С трехфазной силовой обмотки 1 асинхронного двигателя. Дополнительпо измерительн.ые обмотки 2 и 8 через разделительные резисторы 10 и 11 запитывают.ся от генератора 9 В1 1сокой частоты. Высокочастотное напряжение с обмоток 10 и 11 вместе с мизкочастотныг-ш составляющим- наводимой в них ЭДС поступает на вход фильтра 12 высокой частоты, в котором вы,целяются высокочастотные спгналы 15 и 16 (фиг. 4), промоду:шрованные зубцовьи-.ш пульсациями. Амп.тштудны демодулятор 1-3 вь деш1ет синусную и косинусную огибающие 17 и 18 (фиг. 4), пропорциональные синусу и косинусу угла поворота ротора, по которым вырабатывается сигнал обратной связи по скорости О в блоке 14 (фиг. 1) вычисления скорости.
Сигнал О получается следующим образом. Каждую измерительную обмотку 2 и В и короткозамкнутый виток боковой поверхности ротора можно представить как трансфорь атор с переменной взаимоиндуктпвностью (фиг. 3) .
Д1Ш упрощения предположим, что коэффициент связи короткозамкнутого витка и любой измерительной обмотки 2 и В изменяется от О до 1. сигналу обратной связи О элемент
м
о к 1, (1)
К
4иТ|Г где К - коэффициент связи; М - взаимная индуктивность; LI - индуктивность измерительно обмотки; LII - индуктивность короткозамкнутого витка. Тогда эквивалентное комплексное входное сопротивление такого трансформатораgi. xi мг ..T4i где Е - выходное напрязрение генератора высокой частоты; ток измерительной обмотки активное сопротивление в цепи измерительной обмотки;активное сопротивление ко роткозамкнутого витка; круговая частота генерато ра. Если пренебречь активным сопротивлением короткозамкнутого витка :а активное сопротивление в цепи из мерительной обмотки сосредоточить на разделительном резисторе, то на пряжение на этой обмотке будет опр деляться вьфажением (I-K) Rl+jcaL| (I-K) a амплитуда огибающей тока высокой частоты U1 lU11 tOi.Ll (I-K) Поскольку все входящие в (4) ве личины, кроме К не зависят от угл поворота ротора, то можно выбрать такую форму и расположение измерительных обмоток, т.е. зависимость коэффициента связи от угла поворота ротора, чтобы огибающая тока вы сокой частоты была синусоидной или косинусоидной. В частности, если положить в (4 R1 ЦЬ то при 2ЬП(Х (6)
(1+cosnc) ,
2 12 где о( - угол поворота вала двпгатеп - число короткозамкнутых витков ротора. Сигнал, пропорциональный угла, получается аналогично при расположении второй измерительной обмотки со сдвигом на 1/А периода короткозамкнутого витка боковой поверхности ротора. В блоке 14 вычисления скорости одним из известных способов, например по соотношению 1 ., dydx ,. п dt-y dF X СО8ПЙ.у SinCX Таким образом, благодаря введению второй измерительной обмотки, подаче на обе указанные обмотки сигнала высокой частоты и Последующей обработке этих сигналов в блоке обратной связи повышается точность регулирования скорости электропривода. Формула изобретения Электропривод переменного тока, содержащий асинхронный двигатель с короткозамкнутым ротором, с трехфазной силовой и первой измерительной , обмотками на статоре, преобразователь частоты с блоком управления, преобразовательный блок с двумя вхо. дамк и тремя выходам-, элемент сравнения, блок обратной связи, трехфазная силовая обмотка асинхронного вигателя подключена к выходу преобазовареля частоты, управляющий вход оторого подключен к выходу блока упавления, входы которого подключены с оответствую1Ц11мвыходам преобразо-. ательного блока, один вход котороо под1слючен к выходу элемента сравения, а другой вход - к выходу блоа обратной связи, один вход котороо подключен к одному выходу первой змерительной обмотки, один вход элеента сравнения подключен к задатчиу скорости, а другой вход - к выхоу блока обратной связи, отличащийся тем, что, с целью повыения точности регулирования скороси, в него вЬедены вторая измеритель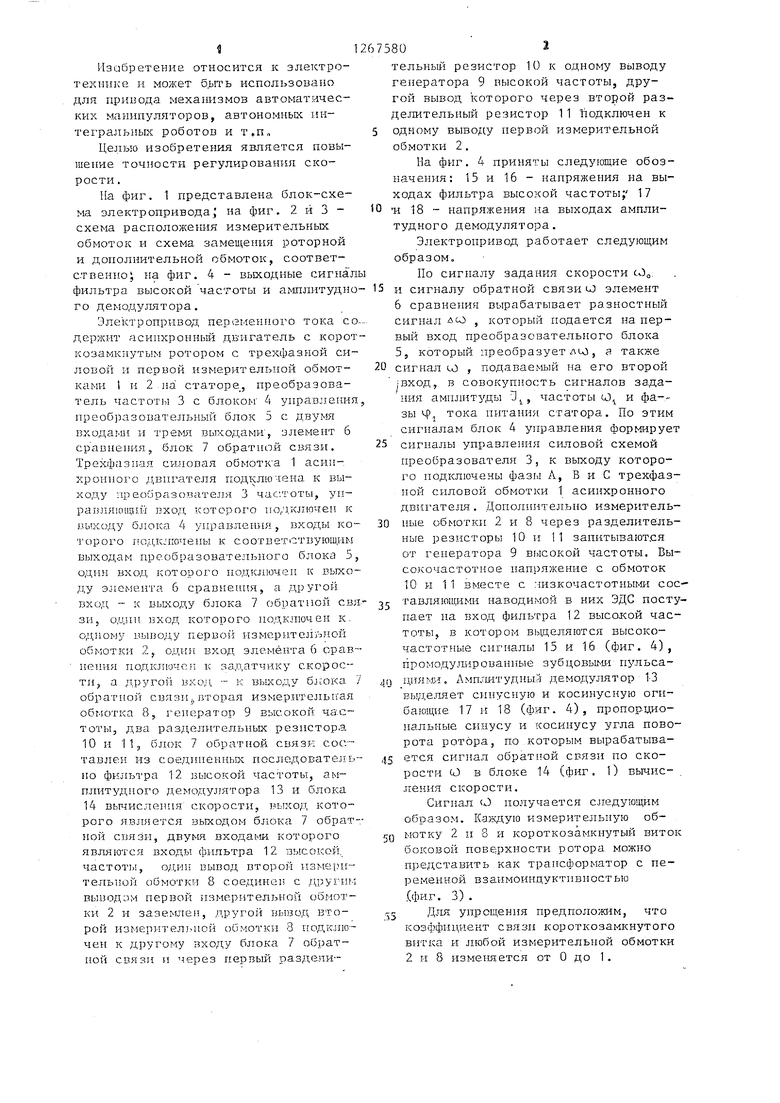

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1670766A1 |
| Модуляционный асинхронныйВЕНТильНый гЕНЕРАТОР | 1978 |
|
SU811482A1 |
| УСТРОЙСТВО ДЛЯ ПЛАВНОГО ПУСКА АСИНХРОННОГО ДВИГАТЕЛЯ | 2005 |
|
RU2294592C1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| Электропривод переменного тока | 1989 |
|
SU1713071A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2619925C1 |
| ПУСКОРЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2596218C1 |
| Электромашинный преобразователь частоты | 1987 |
|
SU1651351A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| МАЛОВЕНТИЛЬНЫЙ ЧЕТЫРЁХКВАДРАНТНЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2017 |
|
RU2660187C1 |
Изобретение относится к электротехнике и может быть использовано ДЛЯ привода автоматических манипуляторов, автономных интегральных роботов и т.п. Цель изобретения - повышение точности регулирования. Указанная цель достигается благодаря введению второй измерительной обмотки (О), к-рая вместе с первой измерительной О подключена к выходу г-ра высокой частоты. Это позволяет более точно вьщелить сигнал, пропорциональный CKopoc-fH двигателя и использовать его в контуре обратной связи по скорости, что приводит к повышению точности регулирования. Устр-во содержит элемент 6 сравнения, преобразовательный блок (Б) 5. Б 4 управления, преобразователь 3 о частоты, выход к-рого подключен к статорной О, две измерительные О, (Л подключенные к выходу указанного с г-ра и ко входу Б 7 обратной связи. Б 7 содержит фильтр 12, демодулятор 13 и Б 14 вьделения скорости. 4 ил.
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU680130A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1978 |
|
SU864478A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гравиметр | 1974 |
|
SU548820A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Датчик угловой скорости | 1975 |
|
SU556384A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
