Изобретение относится к электротехнике, в частности к регулируемом электроприводу, и может быть исполь зовано для прецизионного асинхронно го электропривода с глубоким диапазоном регулирования скорости и в ел лящих электроприводах переменного тока для отработки: перемещения рабо чих органов промышленных роботов, станков и других машин и механизмов с повышенными требования к надежнос ти исполнительных электродвигателей к точности регулирования скорости и процессов отслеживания управляющих воздействий. Известно устройство для регулирования скорости асинхронного двигателя , содержащее блок задания скорости, регулятор скорости, элемент сравнения, формирователь амплитуды тока статора,формиователь скольжения , сумматор и силовой преобразователь тска, выходы которого подключены к статорным обмоткам асинхгч ронного двигателя, на валу которого установлен датчик скорости вращения , подключенный к перво входу элемента сравнения и к первому входу сумматора, при этом выход блока задания скорости подключен к второму входу элемента сравнения,выход которого соединен с входом регулятора скорости, подключенного выходом к Входам формирователя амплитуды тока статора, и формирователя скольже НИН, выход формирователя скольжения подключен к второму входу сумматора, выход которого и выход формирователя амплитуды тока статора подключены соответственно к входам управления частоты и амплитуды тока статора силового преобразователя тока tl. Недостатком данного устройства является невысокая точность регулирования скорости из-за отсутствия коррекции по фазе вектора тока статора . Наиболее близким к предлагаемому является устройство для регулирования скорости асинхронного двигателя, содерясащее блок задания скорости, регулятор скорости, элемент сравнения, формирователь амплитуды тока статора, формирователь скольжения, блок коррекции фазы тока статора., два сумматора, преобразователь частоты с входами управления амплитудой и частотой тока статора, выходы которого подключены к статорным обмоткам асинхронного двигателя, на валу которого установлен датчик скорости вращений, подключенный к пер-. вому входу элемента сравнения и к первому входу первого сумматора, выход блока задания скорости подключен к второму входу элемента сравнения, выход которого соединен с входом регулятора скорости, подключенного выходом- к входам формирователя ампли туды тока статора, формирователя, скольжения и блока коррекции фазы тока статора, при этом выход фор 1ирователя амплитуды -тока статора подключен к входу управления амплитудой тока статора преобразователя частоты, выход формирователя скольжения подключен к второму входу первого сумматора, выход блока коррекции фазы статора подключен к первому входу второго сумматора, второй вход которого соединен с выходом первого сумматора, а выход подключен к. входу управления частотой преобразователя частотыС2 ;. Недостатком известного устройства является невысокая точность регулирования скорости из-за недостаточг ного быстродействия по цепи коррекции фазы вектора тока статора асинхронного двигателя. Цель изобретения - повышение точности регулирования скорости асинхронного двигателя за счет введения быстродействующей коррекции фазы вектора тока статора. Указанная цель достигается тем, что в устройство для регулирования скорости асинхронного двигателя, содержащее блок задания скорости, регулятор скорости, элемент сравнения,- формирователь амплитуды тока .статора, формирователь скольжения, блок коррекции фазы тока статора, два сумматора, два генератора импульсов и преобразователь частоты с входами управления амплитудой и частотой тока статора, выходы которого подключены к статорным обмоткам асинхронного двигателя, на валу которого установлен датчик скорости вращения, подключенный к первому входу элемента сравнения и к первому входу первого сумматора, при этом выход блока задания скорости подключен к второму входу элемента сравнения, выход которого соединен с входом регулятора скорости, подключенного выходом К- входам формирователя амплитуды тока статора, формирователя скольжения и блока коррекции фазы тока статора, выход формирователя амплитуды тока статора подключен к входу управления амплитудой тока статора преобразователя частоты, выход формирователя скольжения подключен к второму входу первого сумматора, выход которого соединен с первым генератором импульсов, подключенным выходом к первому входу второго сумматора, выход блока коррекций фазы тока статора Соединен с вторым генератором импульсов, подключенным выходом к второму вхоу второго сумматора, выход которого подключен к входу .управления часто-.
ТОЙ преобразователя частоты, введены блок определения направления вращения вектора тока статора, выполненный в виде релейного элемента блок определения направления сдвига фазы вектора тока статора, выполненный в виде релейного -элемента, и третий сумматор, а преобразователь частоты снабжен входом упраэления направлением вращения вектора тока статора, при этом вход блока определения направления вргицения вектора тока статора подключен к выходу первого сумматора, а выход - к первому входу третьего сумматора, вход блока определения направления сдвигу фазы вектора тока статора подключен к выходу блока коррекции фазы тока статора, а выход - к второму входу третьего сумматора, выход которого подключен к входу управления направлением вращения вектора тока статора преобразователя частоты. .
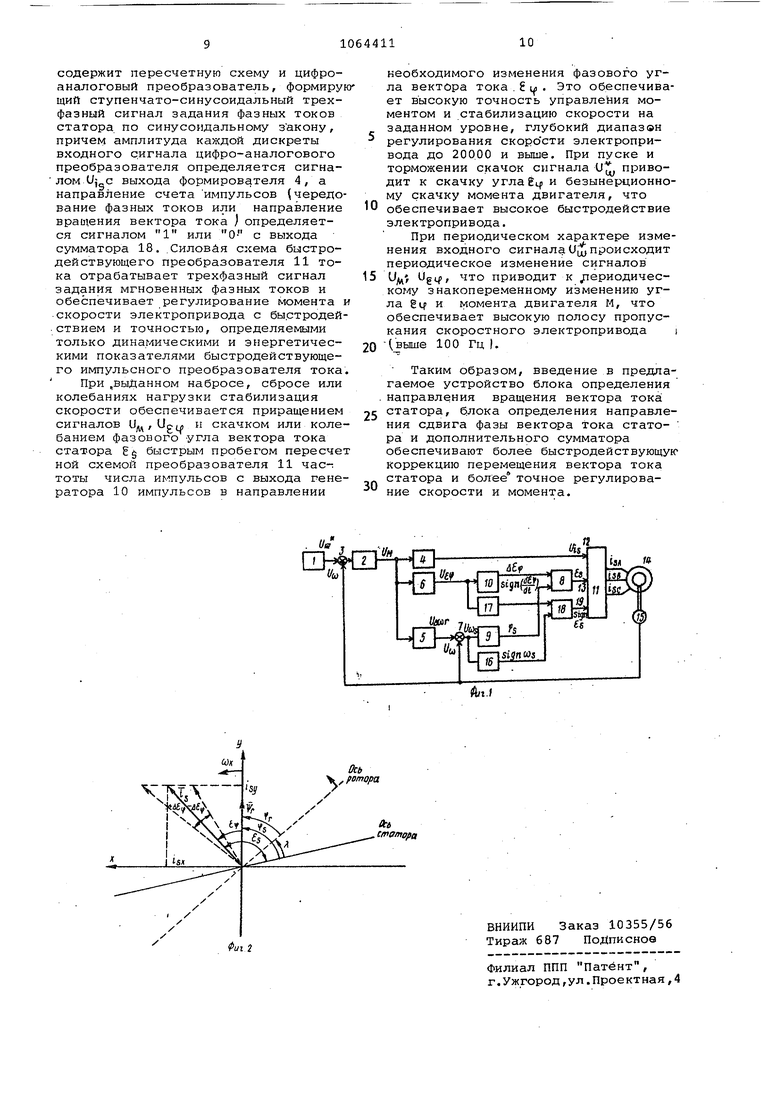
На фиг.,1 представлена структурная схема предлагаемого устройства; на фиг. 2 - векторная диаграмма, поясняющая его работу. ,.
Устройство содержит блок 1 задания скорости (фиг. 1J , регулятор 2 скорости, элемент 3 сравнения, формирователь 4 амплитуды тока статора формирователь 5 скольжения, блок б коррекции фазы тока статора, сумматоры 7 и 8, генераторы 9 и 10 импульсов, преобразователь 11 частоты с входом 12 управления амплитудой тока статора и с входом 13 управления частотой тока статора. Выходы преобразователя 11 частоты подключены к статорным обмоткам асинхронного двигателя .14, на валу которого установлен датчик 15 скорости вращения, подключенный к первому входу элемента 3 сравнения и к первому входу первого сумматора 7. Выход бл ка 1 задания скорости подключен к второму входу элемента 3 сравнения выход которого соединен с входом регулятора 2 скорости, подключенного выходом квходам формирователя 4 амплитуддл тока статора, формирователя 5 скольжения и блока 6 коррекции фазы-.тока статора.
Выход формирователя 4 амплитуды тока статора подключен к входу 12 управления амплитудой тока статора преобразователя 11 частогы. Выход формирователя 5 скольжения подключе к второму входу первого сумматора 7, выход которого соединен с первым генератором 9 импульсов, подключенным выходом к первому входу второго сумматора 8. Выход«блока 6 коррекции фазы тока статора соединен с вторым генератором 10 и.мпульсов, подключенным выходом к второму входу второго сумматора 8, выход которого подключен к входу 13 управления частотойпреобразователя 11 час:ТОТЫ.
В устройство введены блок 16 определения направления вращения вектора тока статора, выполненный в виде релейного элемента, блок 17 определения направления сдвига фазы вектора тока статора, выполненный в
0 виде релейного элемента, и третий сумматор 18, а преобразователь 11 частоты снабжен входбм 19 управления направлением вращения вектора тока статора. Вход блока 16 определения
5 направления вращения вектора статора подключен к выходу первого сумматора 7, а выход т к первому входу третьего сумматора 18. Вход блока 17 определения направления сдвига
0 фазь вектора тока статора подключен к выходу блока б.коррекции фазы тока статора, а выход - к второму входу третьего сумматора 18, выход ко-, торого подключен к входу 19 управ5ления направлением вращения вектора тока статора преобразователя 11 частоты.
На фиг. 1 и 2 приняты следующие обозначения: х, у - оси ортогональ0ной системы координат, вращающейся синхронно с вектором потокосцепления ротора; Vp - вектор потокосцепления ротора; .Lg- вектор тока ста Topa;.ig - проекция вектора тока
5 статора на ось у, совпадающую с направлением вектора потокосцепления ротора; - проекция вектора тока статора на ось х, ортогональную вектору потокосцепления ротора; Ш| - угловая скорости вреицения сис0темы координат относительно неподвижной оси статора; Ei - угол между вектором тока статора и вектором потокосцепления ротора; Sg уголвектора тока статора относительно
5 неподвижной оси статора; f - угол вектора потокосцепления ротора относительно оси вращающегося ротора;
Vg - угол век.тора потокосцепления . относительно неподвижной оси стато0ра; Д - угол оси ротора относительно неподвижной оси статора ;ia€t,- приращение угла вектора тока статора относительно вектора потокосцепления ротора;.и - сигнал задания скорос5ти; U|jj- сигнал действительной скорости; сигнал задания момента; Ujg- сигнал задания .модуля вектора тока статора; сигнал задания угла межлу вектором тока статора
0 и вектором потокосцепления. ротора; лсог сигнал задания скольжения относительно ротора; Sf п lUg - сигнал ,знака {направления) синхронного пе-г ремещения векторов тока статора и по5 токосцепления ротора относительно йЕЧ неподвижной оси статора; . сигнал знака (.направления(асинхрон .го перемещения вектора тока статора относительно вектора потокосцеп ления ротора; .ш,- сигнал знака (направление ) перемещения вектора тока статора относительно неподвиж ной оси статора; 1дд ,tgg , i, - мг венные-фазные токи- статора асинхро ного двигателя. Устройство работает следующим образом. Для безынерционного управления моментом асинхронного двигателя 14 пропорционально выходному воздействию моментного контура, получаемому с выхода регулятора 2 скорости, вводят автономный канал управления .и J paктичecки безынерционно осущест вляют фаговый сдвиг t/igj., вектора тока статора ; 2 относительно вектора пото косцепления ротора V , как показано на 4щг. 2, согласно уравнению f pi:r rs5 c Я& . , 2р-..,2,..., L, 1..L.; Так,как изменение модуля и углов го положения вектора потокосцепления ротора происходит с большой инерционностью, то для безынерционного управления моментом необходимо либо, поддерживать постоянным угол EI , обеспечить безынерционное управление модулем вектора тока статора, -либо одновременно с изменение модуля i5 или его поддержанием на определенном уровне обеспечить безынерционно управляемое, в том .числе и скачкообразное, изменение угла Eg). Связь между изменениями параметров вектора тока статора i , ёс/ определяют законом регулирования из условия оптимизации энергетических показателей электропривода и вводят закон регулирования, выраженный, например, функцией 4 Р(лл) , в блоки нелинейного преобразования сигнала задания момента таким образом, чтобы выполнялось условие безынерционного и линейного управления моментом двигателя согласно уравнению ,, (2, Согласно векторной диаграмме (фиг. 2 ) фазовый угол вектора тока .статора относительно неподвижной оси статора неподвижной оси статора .равен алгебраической сумме углов Р E+lf -t-g г+Ц +Л+е (31 - д- ( - --1 I - I При. ЭТОМ угол между векторами Т Ч определяется уравнением ЕЧ,--С.ГСЧГ Sjf Ортогональные составляющие вектора тока - статора определяются в функ- ции -сигнала задания момента- исходяиз .вь1бранного закона регулирования, согласно уравнениям )-CJbiJk. PL. В связи с чем требуемый угол Ei дят в фун.кции сигнала задания момента. Для исключения информации о действительных параметрах в ектора потокосдепления ротора Vf , принимают заранее выбранный закон изменения или поддержания на определенном уровне модуля вектора потокосцепления ротора VP и определяют скольжение вектора потокосцепления ротора относительно оси ротора uWf, j( . С (JJ - ш согласно уравнению dt ( 4 туДля исключения информации о действительном положении ротора (угол Д) .суммарный сигнал задания скольГгсения, определяемый согласно уравнениям {61 - (7) в функции сигнала задания момента при заданном законе ребГулирования и сигнала действительной скорости си , преобразуют в непрерывную последовательность стробированных импульсов синхронного вращения векторов Фр , Т. . Частота импульсов пропорциональна сумме сигналов uu)j,, ии .лл U,- U;,.U;.r,, (в, а стробирующий импульс соответствует знаку сигнала Wg . Полученные импульсы поступают на пересчетную схему, кодируются и подаются на входы цифро-аналоговых преобразователей, с выходов которых получают ступенчато- синусоидальный трехфазный сигнал задания мгновенных фазных токов, отрабатываемый быстродействующим импульсным преобразователем тока, в связи с чем цифро-аналоговое преобразование импульсов синхронного перемещения (вращения) векторов ig , Фр обеспечивает дискретное преобразование скоростей вращения (уравнение 8J в соответствующие им углы. % ± t Л 9) Для повышения быстродействия и точности управления скоростью и моментом преобразуют сигнал задания угла,€1 в стробированные импульсы
асинхронного перемещения вектора ig относительно , в направлении, соответствующему знаку производной этоtJEu, го угла ---Д- , при этом стробирующий импульс на каждой дискрете соответствует зйаку производной (приращения ) угла +лёц) на этой дискрете. Согласно уравнению (1)знак
61
производной однозначно определяет знак приращения момента.
Последовательность преобразования сигналов согласно приведенным аналитическим выражениям поясняется Схемой на фиг. 1. Сигнал рассогласова-. ния заданной и действительной скорости U -Uijy подается на вход регулятора 2 скорости с пропорционально-интегральным законом регулирования. С выхода регулятора 2 скорости сигнал и задания момента двигателя поступает на вход формирователя 4 амплитуды.тоха статора, на выходе которого получают сигнал U,-g нелинейным преобразованием сигнала задания момента U/y
и- l)u +и
(и«)
Ь I s:/
5Л
Сигнал С/дд также поступает на вход блока б коррекции фазы тока статора (относительно вектора потокосцепления ротора ) и на вход формирователя 5 скольжения, в которых сигнал нелинейно преобразуется согласно уравнениям (4 - 7 К
Сигнал задания угла ( с выхода блока 6 подается на вход генератора 10 импульсов и на вход блока 17 определения направления сдвига фазы вектора тока статора.
В соответствии с изменением сигнала Ugi на выходе генератора 10 импульсов образуется последовательность импульсов, число которых строto ограничено величиной изменения сигнала.-лUgi. На выходе блока 17.. образуется сигнал 1 или О в зависимости от знака изменения сигнала Частота импульсов на выходе генератора 10 имдульсоь. постоянна и находится в мегагерцовой зоне, в связи с чем число-импульсная отработка изменения сигнала4ир1;происходит за несколько микросекунд, что позволяет практически мгновенно сдвигать по фазе сигнал задания мгновенных фазных токов статора на угол , необходимый для скачка момента согласно уравнению (1).
Поступающий с выхода формирователя 5 скольжения сигнал CJKOЛьжeния вектора потокосцепления ротс ра. Vp относительно ротора (J суммируется с сигналом действительной скорое-, ти ротора и их сумма.поступает на
вход генератора 9 импульсов и на вход блока 16 определения направления вращения вектора тока статора, с выхода которых поступает импульсная информация об угле и направ5 лении синхронного вращения siij-n о) . С выхода генератора 9 импульсов сни мается непрерывная последовательность импульсов, дискретно перемещающих сигнал задания вектора тока
0 статора синхронно с дискретным изменением фазового угла вектора потокосцёпления ротора относительно оси статора Vg(t). С выхода блока 16 поступает сигнал 1 или ,0 в за5 висимости от полярности суммы сигналов , что для каждого импульса с выхода генератора 9 импульсов определяет направление сдвига фазового угла Ч на каждой дискрете.
0 Частота импульсов с выхода генератора 9 иг.1пульсов примерно на два порядка ниже частоты импульсов с выхода генератора 10 импульсов, что, обеспечивает отработку число-импульс
5 ной динамической коррекции по углу ёц)(1 (асинхронное перемещение) за весьма малый промежуток синхронного перемещения (за один-четыре периода импульсов синхронного перемещения - с выхода генератора 9 импулвсовА
0 Импульсы с выходов генераторов 9 и 10 импульсов поступают на сумматор 8, на выходе которого образуется последовательность импульсов дискретного перемещения вектора то5 ка статора на фазовый (1)согласно уравнению (3).
На вход сумматора 18 поступают сигналы 1 или О направления асинхронного (с выхода блока 17/ и
0 синхронного (с выхода блока 16 перемещения вектора тока статора относительно потокосцепления ротора, причем логика сумматора 18 строится таким образом, что каждому импульсу
5 с выхода сумматора 8 соответствует знак 1 или О на выходе сумматора 18, который определяется б юком 17, если этот импульс на выходе сумматора 8 является импульсом асинхQ ронного перемещения. В промежутках между импульсами асинхронного переме щения или при их отсутствии (в статике ) сигнал на выходе сумматора 18
г2 Р 5t(rn-- определяется сигналом 1
cl-t
5
или О с выхода блока 16, т.е. соответствует направлению синхронного перемещения. С помощью выходного сиг нала сумматора 18 создается быстродействующая коррекция перемещения
0 вектора тока статора в обратном направлении относительно синхронного перемещения при необходимости сброса момента двигателя.
Быстродействующий преобразователь
5 частоты (преобразователь 11 тока )

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Частотно-управляемый электропривод | 1981 |
|
SU1010714A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ, содержащее блок задания скорости, регулятор скорости, элемент сравнения , формирователь амплитуды тока, статора, формирователь скольжения, блок коррекции фазы -тока статора, два сумматора, два генератора импульсов и преобразователь частоты с входами управления амплитудой и частотой тока статора, выходы которого подключены к статорным обмоткам асинхронного двигателя, на валу которого установлен датчик скорости вращения, подключенный к первому входу элемента сравнения и к первому входу первого сумматора, при этом выход блока задания скорости подключен к второму входу элемента сравнения, выход которого соединен с входом регулятора скорости, подключенного выходом к входам формирователя амплитуды тока статора,, формирователя скольжения и блока коррекции фазы тока статора, выход : формирователя амплитуды тока стато.- ра подключен к входу управления амплитудой тока статора преобразователя частоты, выход формирователя скольжения подключен кВторому входу первого суг.1матора, выход которого соединен с первым генератором импульсов, подключенным выходом к первому входу второго сумматора, выход блока коррекции фазы тока статора соединен с вторьи. генератором импульсов, подключенным к второму входу второго сумматора, выход которого.подключён к входу управления частотой преобразователя частоты, отличающееся .тем, что, с целью повышения точности регулирования скорости, в него введены блок определения направления вращения вектора тока статора, выполненный в виде релейного элемента, (Л блок определения направления сдвига фазы вектора тока статора, выполненн.ый в виде релейного элемента, и третий сумматор, а преобразователь частоты снабжен входом управления направлением вращения вектора тока статора, при этом вход блока определения направления вращения вектора тока статора подключен к о выходу первого сумматора, а выход к первому входу третьего сумматора, вход блока определения направления li{ сдвига фазы вектора тока статора ;-, подключен к выходу блока коррёкции фазы тока статора, а выход - к второму входу Фретьего сумматора, выход которого подключен к входу управления направлением вращения вектора тока статора преобразователя частоты. 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ перевозбуждения гистерезисного двигателя | 1968 |
|
SU587588A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пйтент ФРГ № 1563228, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
