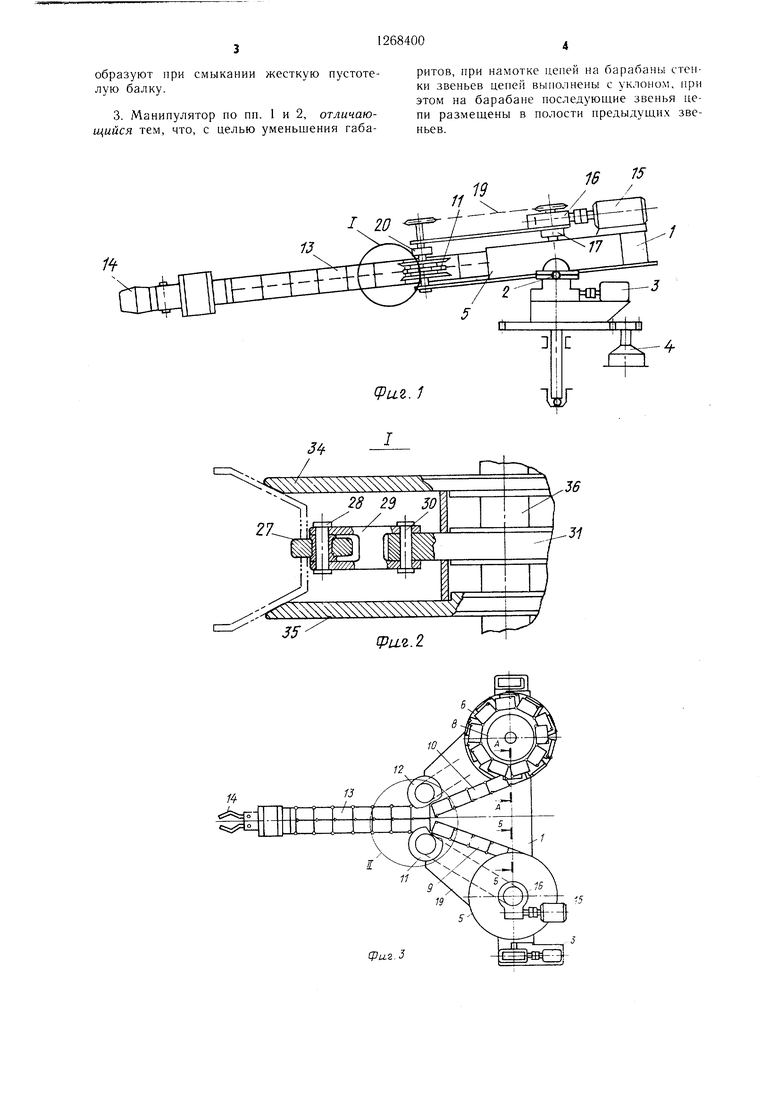
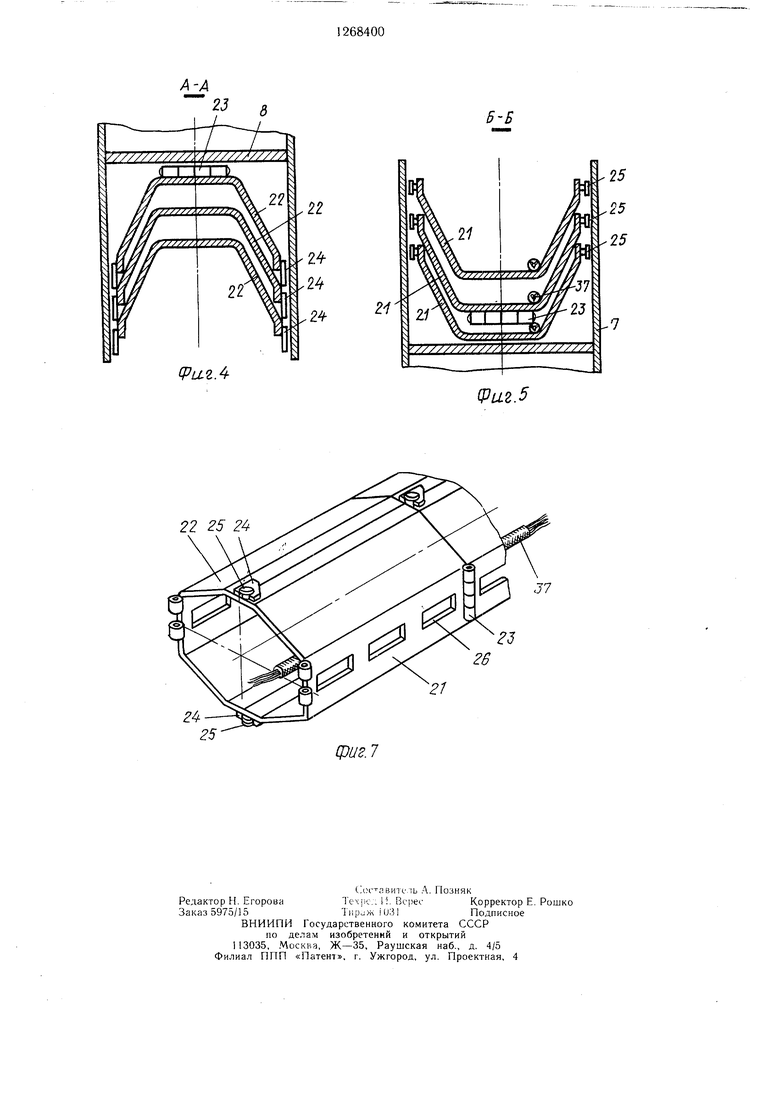
Изобретение относится к загрузочным устройствам, используемым в машиностроении, роботостроении и других отраслях техники. Целью изобретения является повышение жесткости руки при поперечных нагрузках, повьииение плавности хода, снижение материалоемкости конструкпии, уменьшение габаритов барабанов и тем самым - конструкции в целом. На фиг. 1 схематично изображен манипулятор, общин вид; на - фиг. 2 --- узел I на фиг. 1; на фиг. 3 - манипулятор, вид сверху; па фиг. 4 -- сечение А-А на фиг. 3; на фиг. 5 - - сечение Б-Б на фиг. 3, на фиг. 6 узел И на фиг. 3; на фиг. 7 пара соседних звеньев параллельных цепей. Манипу.ттор состоит из рамы 1, способной поворачиваться на горизонтальной оси 2 при помощи привода 3, а вокруг вертикальной оси - при помощи п|1ивода 4. На ра.ме 1 установлены корпуса 5 и 6 барабанов 7 и 8, к которым фикреплепы цепи 9 и 10, пропущенные .между блоков И и 12 паправляюniero механизма и образующие механическую руку в виде жесткой балки 13, на конце которой установлен рабочий орган - схват 14. На корпусе 5 установ ен привод 15, связанный с барабаном 7 редуктором 16 и об онной .муфтой 17, а с ведуп ей звездочкой 18 блока 11 с номонхью цепной передачи 19 и обгонной муфты 20. Аналогичный привод поставлен на корпус 6 барабана (не ноказан). Рука манипулятора состоит из звеньев 21 цепи 9 и звепьев 22 цепи iO. Звенья одной цени соединены в цепь с помощью петель 23. .Звенья параллельных цепей соединены друг с другом с помощью зацепов 24 I штифтов с проточками 25. На поверхности всех звеньев выштампованы окна 26, с которыми находятся в зацеплении зубья-ролики 27 ведущей звездочки 18 блока 11, и, ана;к)гпчпо, б.юка 12 направляющего .механизма. Каждый ролик 27 посажен с помощью оси 28 на коромысло 29, а коромысло скреплено с по.мощью оси 30 с диском 31 ведущей звездочки 18 и размещено между пружина.ми 32 и 33. Диск 31 ведущей звездочки 18 установлен между дисками 34 и 35 блока направляющего механиз.ма и на одной оси 36 с ними. Диск 34 и 35 могут свободно поворачиваться на оси 36. Для передачи команд и силового привода схвата 14 вдоль внутренней поверхности звеньев одной из ценей 9 проложен электропровод 37. Манипулятор работает следуюпшм образом. При включении приводов 15 на размотку цепей вращение передается с помощью гибких передач 19 и обгонных муфт 20 па ведущие звездочки 18 блоков 11 и 12 направляющего механизма, а муфты 17 отключают барабаны 7 и 8, предоставляя им беспрепятственно вращаться на осях при разматывании цепи. Зубья-ролики 27 звездочек 18 входят в окна 26 звеньев 21 и 22 параллельных цепей и, втягивая их между блоками 11 и 12 направляющего механизма, заставляют звенья одной цепи смыкаться со звеньями второй цепи, цри этом зацепы 24 захватывают штифты с проточками 25 и после направляющего механизма рука 13 выдвигается как единая жесткая конструкция. При обратном ходе приводы 15 вращают посредством редукторов 16 и обгонных муфт 17 барабаны 7 и 8, на которые наматываются цепи 9 и 10. Обгонные муфты 20 отключают ведущие звездочки 18, предоставляя им вращаться свободно на своих осях. Звенья цепей после прохода между блоками 11 и 12 поворачиваются относительно петель 23, каждая цепь - в сторону своего барабана, и зацепы 24 освобождают щтифты с проточками 25: звенья отсоединяются друг от друга и ветки цепей укладываются друг в друга, как показано на фиг. 4 и 5. Схват 14 .может перемещаться вместе с рукой 13, или же вместе с ра.мой 1 вокруг горизонтальной и вертикальной осей от приводов 3 и 4. Таким образом, предлагае.мый манипулятор имеет руку, устойчивую при любых нагрузках и любой ее ориентации, прочную и легкую благодаря жесткой пустотелой конструкции, укладывающуюся в два ко.мнактных барабана при плавности хода, которая обеспечивается подпружиненными зубьями-роликами ведун.1их звездочек. Формула изобретения 1.Манипулятор, содержащий поворотную раму, на которой с.монтированы два барабана, несущие механическую руку, образованную двумя параллельными цепями, которые соединены на одном конце рабочим органом, а другими концами цепи прикреплены к соответствующим барабанам, направляющий механизм и приводы, отличающийся тем, что, с целью повышения жесткости руки цри ноиеречных нагрузках в ней и плавности хода, каждая пара соседних звеньев параллельных цепей снабжена замками, состоящими из зацепов, расположенных на звеньях одной цепи, и штифтов, расположенпых на соответствующих звеньях другой цени, а направляющий механизм снабжен ведущей звездочкой, зубья которой представляют собой ролики, подпружиненные в тангенциальном направлении. 2.Манипулятор по п. 1, отличающийся тем, что, с целью снижения материалоемкости, звенья цепей выполнены пустотелыми V-образной формы в поперечном сечении, при ЭТОМ соответствующие звенья ценей
образуют при смыкании жесткую пустотелую балку.
3. Манипулятор по пп. 1 и 2, отличающийся тем, что, с целью уменьшения габаритов, при намотке цепей на барабаны стенKVi звеньев цепей выполнены с уклоном, при этом на барабане последующие звенья цепи размещены в полости предыдущих звеньев.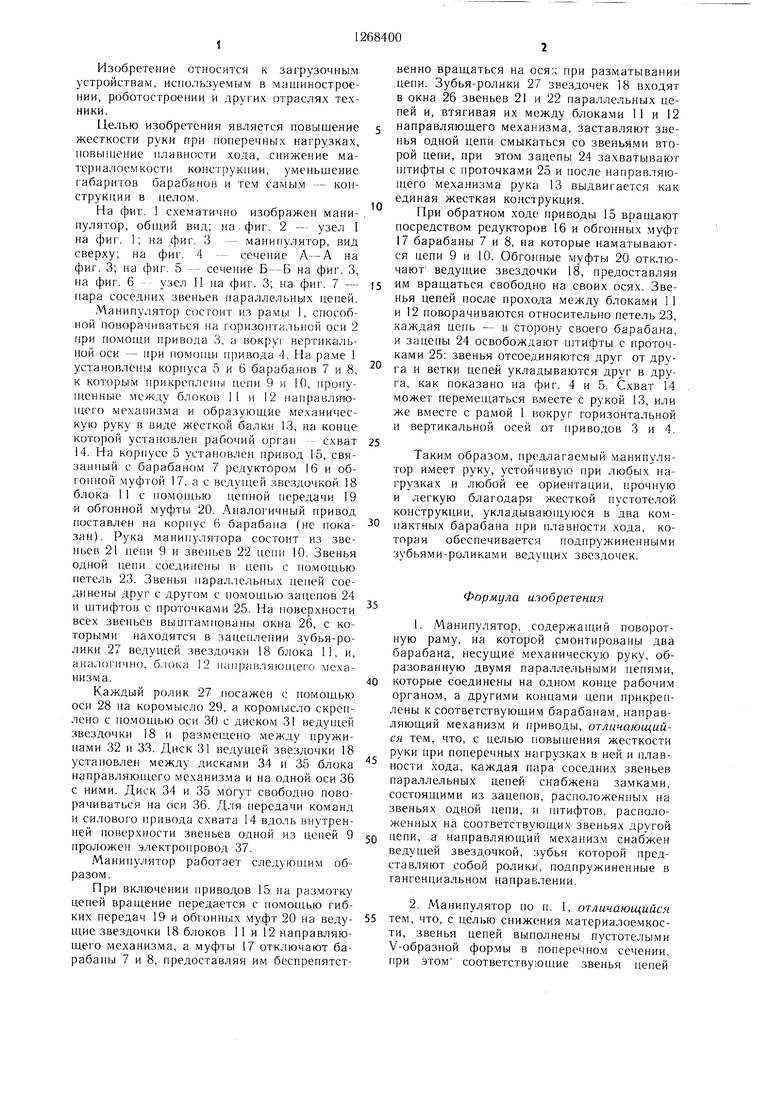
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU831607A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Механизм преобразования возвратно-поступательного движения в непрерывное вращательное | 2016 |
|
RU2629584C2 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| ПРИВОД БИОФЕРМЕНТАТОРА БАРАБАННОГО ТИПА | 2001 |
|
RU2205305C2 |
| КОЛЕСО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2204490C1 |
| Привод протеза руки | 1979 |
|
SU825064A1 |
| Трансмиссия велосипеда | 2017 |
|
RU2654444C1 |
| Транспортное средство | 1990 |
|
SU1735163A1 |
| Вариатор Н.П.Ефимова | 1981 |
|
SU1199674A1 |
Изобретение относится к загрузочным устройствам, используемым в машиностроении, роботостроении и других отраслях техники, и позволяет повысить жесткость руки, плавность хода, снизить материалоемкость I 11 сриг.б конструкции и уменьшить габариты барабанов и всего манипулятора. Зубья-ролики 27 вращающихся звездочек 18 входят в окна 26 звеньев параллельных цепей и, втягивая их между блоками 11 и 12 направляющего механизма, заставляют звенья одной цепи смыкаться с звеньями другой цепи. При этом зацепы 24 захватывают штифты с проточками 25, в результате после направляющего механизма рука в виде балки 13 выдвигается как единая жесткая конструкция. При намотке цепей звенья отсоединяются друг от друга и укладываются в барабаны, причем последующие звенья размепхаются в полости предыдущих звеньев. 2 з.п. ф-лы. 7 ил. (Л 2J Ю N5 00 4:: О О
п
ц-г.Ч
Сриг.З
п
2 24
-2.
(ри,гЛ
фиг.7
(Риг.5
гз
26
21
| Манипулятор для очистки транспортных средств | 1976 |
|
SU613935A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
