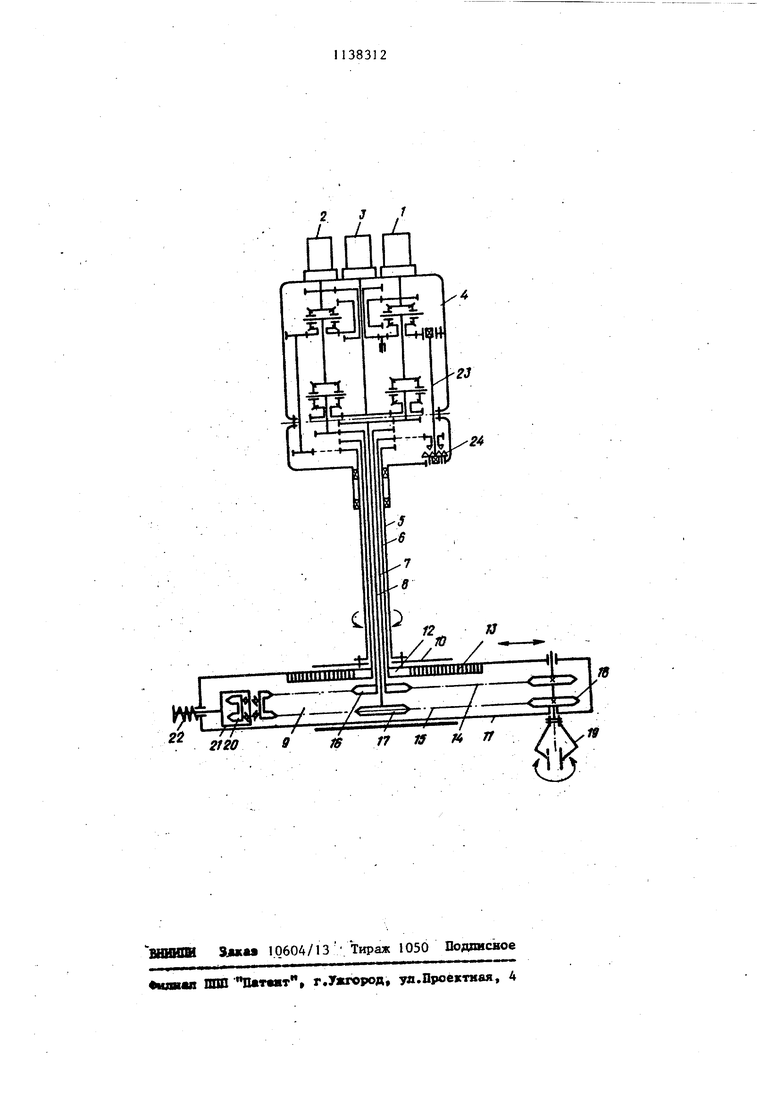
Изобретение относится к маиипуля торным устройствам и, в частности, .манипуляторам с программным управле ;Нием для автоматических линий. , Известна рука манипулятораj соде жащая схват, исполнительные звенья, Связанные собой и образзтощие /дифференциальный механизм, приводны двигатели, связанные с исполнительн /ми зве ньями через механизм кинемати ческой развязки и силового замыкани четырьмя концентрическими валами,пе |вый из которых связан с корпусом дифференциального механизма, а три остальные - с исполнительными звеньями ( Недостатком известного устройства является малая зона обслуживания.. Цель изобретения - расширение зон обслуживания руки манипулятора. Цель достигается тем, что в руке манипулятора, содержащей схват, неполнительные звенья, связанные между собой и образующие дифференциальный механизм, приводные двигатели, связанные с исполнительными звеньями через механизм кинематической развязки и силового замыкания четырьмя концентрическими валами, первый . из которых связан с корпусом дифференциального механизма, а три осталь ные - с исполнительньоми звеньями, корпус дифференциального механизма снабжен направляющей, одно из исполнительных звеньев вьтолнено в виде траверсы, размещенной в этой направляющей с возможностью перемещения в направлении,перпендикулярном оси концентричных валов, и кинемати чески связанной с вторым концентричным валом, два других исполнительных звена выполнены в вцде блоков сдвоенных звездочек, один из которых установлен на траверсе, причем зубчатые венцы звездочек зтого блока жестко связаны между собой и со схва том, а зубчатые венцы другого блока звездочек жестко связаны соответственно с третьим и четвертым концентричными валами, а остальные исполнительные звенья вьшолнены в виде цепей, связанных с зубчатыми венцами блоков сдвоенных звездочек и с дополнительно введенным устройством натяжения этих цепей. На чертеже показана кинематическа схема руки, манипулятора. Рука манипулятора содержит три приводных двигателя 1 - 3, которые связаны при помощи механизма 4 кинематической развязки и силового замыкания с концентричными валами 5 8. Исполнительные звенья руки манипулятора связаны меяоду собой в ввде дифференциала 9. Корпус 10 дифференциала жестко связан с концентричным валом 5. Одно из исполнительных звеньев выполнено в виде траверсы 11, размещенной в направляющей корпуса 10 с возможностью перемещения в направлении, перпендикулярном оси кон-, центричных валов. Траверса 1 кинематически связана с концентрическим валом 6 посредством зубчатого колеса 1 2 и зубчатой рейки 13. Незамкнутые цепи i4 и 15 связаны с концентрическими валами 7 и 8 посредством блока сдвоенных звездочек 6 и 17. Цепи 14 и 15 закреплены одним своим концом на блоке сдвоенных звездочек 18, жестко связанных между собой и со схватом 19. Другие концы цепей 14 и 15 закреплены на натяжном ролике 20, также представляющем . собой сдвоенную звездочку. Натяжной ролик 20 расположен в корпусе 21, имекщем возможность прямолинейного перемещения. Натяжение цепей 14 и 15 обеспечивается с помощью пружины 22 сжатия. Передаточное отношение между цепями 14 и I5 при остановленной траверсе П равно 1, что обеспечивается расположением незамкнутых цепей 14 и 15 с разных сторон относительно звездочек 16 и 17. Рука манипулятора содержит также устро ство для выбора люфта в передачах в ввде торсиона 23 и муфты 24, фиксирующей торсион 23 в напряженном состоянии. Рука манипулятора предназначена преимущественно для подвесных компоновок манипулятора с вертикально расположенной рукой и с возможностью ее вертикального перемещения. Устройство работает следующим образом. При включенном двигателе 1 (двигатели 2 и 3 заторможеныJ движение через дифференциальный механизм 4 передается концентрическим валам 5-8 таким образом, что все валы олучают вращение- в одном направлении с одной н той же скоростью. При этом роисходит вращение корпуса 10. Исполнительные звенья - траверса 11 и блок сдвоенных звездочек 18 со охватом 19 при этом остаются неподвижными относительно корпуса 10. При включенном двигателе 2 (двигатели 1 и 3 заторможены ) движение через дифференциальный механизм 4 передается концентрическим валам таким образом что . вал 5 остается неподвижным, валы 6 и 8 вращаются с одинаковой скоростью в одном направлении, а вал 7 вращается с той же скоростью в противоположном направлении. При этом зацепление колеса 12 с рейкой 13, а также звездочек 16 и 17 с цепями 14 и 15 вызывает прямолинейное перемещение второго исполнительного звена руки- траверсы 1I. Исполнительные звенья корпуса 10 и блок звездочек 18 при этом остаются неподвижными. Наконец, при работе двигателя 3 (двигатели 1 и 2 заторможены) вращение через дифференциальный механизм 4 передается концентрическим валам таким образом, что валы 5 и 6 остаются
неподвижными, а валы 7 и 8 вращаются с одинаковой скоростью в одном направлении. При этом получает вращение третье исполнительное звено блок сдвоенных звездочек 18 со схватом 19, в то время как исполнительные звенья корпуса 10 и траверса 11 остаются неподвижными. При одновременной работе двух или трех двигателей происходит пропорциональное сложение движений исполнительных звеньев. Торсион 23, зафиксированный в напряженном состоянии с помощью муфты 24, обеспечивает безлюфтовую передачу движения по всем степеням подвижности от двигателей к исполнительным звеньям.
Применение руки манипулятора расщиряет область применения промышленных роботов подвесной констр5гкцчи, увеличивает их технологическую универсальность, что позволит обойтись при автоматизации производства меньшим числом различных моделей промышленных роботов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| Манипулятор | 1982 |
|
SU1068280A1 |
| Рука манипулятора | 1985 |
|
SU1252167A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Механическая рука | 1983 |
|
SU1090545A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1981 |
|
SU971644A1 |
РУКА МАНИПУЛЯТОРА,содержа щая схват, исполнительные звенья, связанные меяду собой и образуннцие дифференциальный механизм, приводны двигатели, связанные с исполнительными зве ньями через механизм кинема тической развязки и силового замыкаиия четырьмя концентричными вала,ми, первый яз которых связан с корпусом дифференциального механизма, три остальные - с исполнительными звеньями,.о т ли ч ающая ся тем, что, с целью расширения зоны обслуживания, корпус дифференциального механизма снабжен направляющей, одно из исполнительных звеньев вьтолнено в вчце траверсы, размещенной в этой направляющей с возможностью перемещения в направлё} ии, перпендикулярном оси концентричных валов, и кинематически связанной с вторым концентричным валом, два других исполнительных звена выполнены в виде блоков сдвоенных звездочек, один из которых установлен на траверсе, причем зубчатые венцы звездочек зтого блока жестко связаны между собой и со схватом, а зубчатые венцы другого блока звездочек жестко связаны соответственно с третьим и четвертым концентричными валами, а остальные исполнительные звенья вы-; полнены в виде цепей, связанных с зубчатыми венцами блоков сдвоенных звездочек и с дополнительно введенным устройством натяжения этих.цепей.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор модульного типа | 1977 |
|
SU763082A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
