(54) ПРИВОД ПРОТЕЗА РУКИ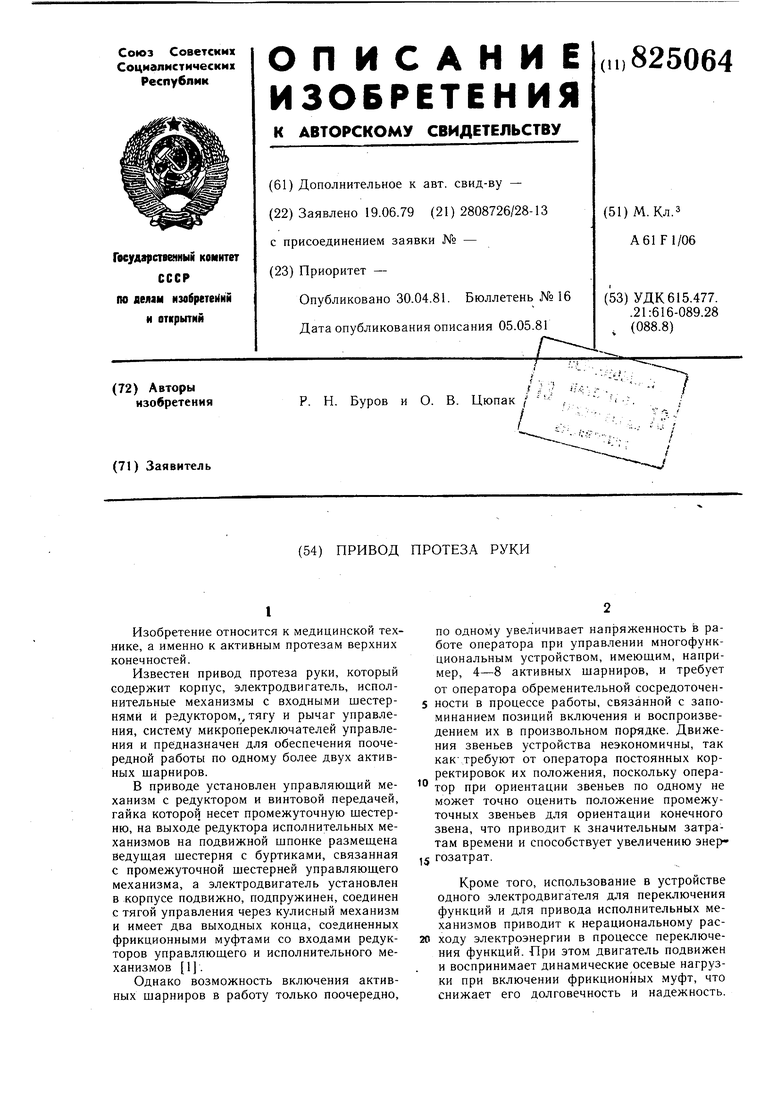

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМОТОР-КОЛЕСО | 1995 |
|
RU2098694C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| Приводное устройство эскалатора | 1982 |
|
SU1089029A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2001 |
|
RU2209356C2 |
| ПЛАНЕТАРНЫЙ ПРИВОД | 1994 |
|
RU2082045C1 |
| ТРАНСМИССИЯ ТРАКТОРА | 2010 |
|
RU2418707C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| Механизм сцепления | 1980 |
|
SU985507A1 |
| Двухскоростная планетарная передача | 1973 |
|
SU528402A1 |

1
Изобретение относится к медицинской технике, а именно к активным протезам верхних конечностей.
Известен привод протеза руки, который содержит корпус, электродвигатель, исполнительные механизмы с входными шестернями и редуктором,, тягу и рычаг управления, систему микропереключателей управления и предназначен для обеспечения поочередной работы по одному более двух активных шарниров.
В приводе установлен управляюший механизм с редуктором и винтовой передачей, гайка которой несет промежуточную шестерню, на выходе редуктора исполнительных механизмов на подвижной шпонке размещена ведуш,ая шестерня с буртиками, связанная с промежуточной шестерней управляющего механизма, а электродвигатель установлен в корпусе подвижно, подпружинен, соединен с тягой управления через кулисный механизм и имеет два выходных конца, соединенных фрикционными муфтами со входами редукторов управляющего и исполнительного механизмов 1.
Однако возможность включения активных шарниров в работу только поочередно,
по одному увеличивает напряженность в работе оператора при управлении многофункциональным устройством, имеющим, например, 4-8 активных шарниров, и требует от оператора обременительной сосредоточенности в процессе работы, связанной с запоминанием позиций включения и воспроизведением их в произвольном порядке. Движения звеньев устройства неэкономичны, так как- требуют от оператора постоянных корректировок их положения, поскольку оператор при ориентации звеньев по одному не может точно оценить положение промежуточных звеньев для ориентации конечного звена, что приводит к значительным затратам времени и способствует увеличению энергозатрат.
Кроме того, использование в устройстве одного электродвигателя для переключения функций и для привода исполнительных механизмов приводит к нерациональному расходу электроэнергии в процессе переключения функций. При этом двигатель подвижен и воспринимает динамические осевые нагрузки при включении фрикционных муфт, что снижает его долговечность и надежность.
Цель изобретения - обеспечение управления протезом без напряжения инвалида и снижение энергопотребления.
Поставленная цель достигается тем, что редуктор исполнительных механизмов выполнен двойным, планетарным, с количеством выходных валов не менее двух в каждой половине и двумя электродвигателями, в приводе установлены управляемые механизмы самоторможения, соединенные с выходными валами редуктора исполнительных механизмов; каждый из механизмов самоторможения имеет входной вал с диском, имеюа1им клиновые пазы, и выполнен в виде муфты обгона двустороннего действия с наружной обоймой, зафиксированной в корпусе, звездочкой с клиновыми пазами и вилкой с возможностью перемещения в осевом направлении, имеющей с двух стоptrR конические штифты, размещенные в клиновых пазах звездочки и диска, причем управляющий механизм оснащен автономным электродвигателем и распределительным поворотным устройством в виде копирных барабанов с двуплечими рычагами, соединенными с вилками механизмов самоторможения.
Кроме того, блоки центральных колес выходных ступеней планетарного редуктора исполнительных механизмов выполнены безопорными, а сателлиты этих ступеней установлены.в сферических подшипниках.
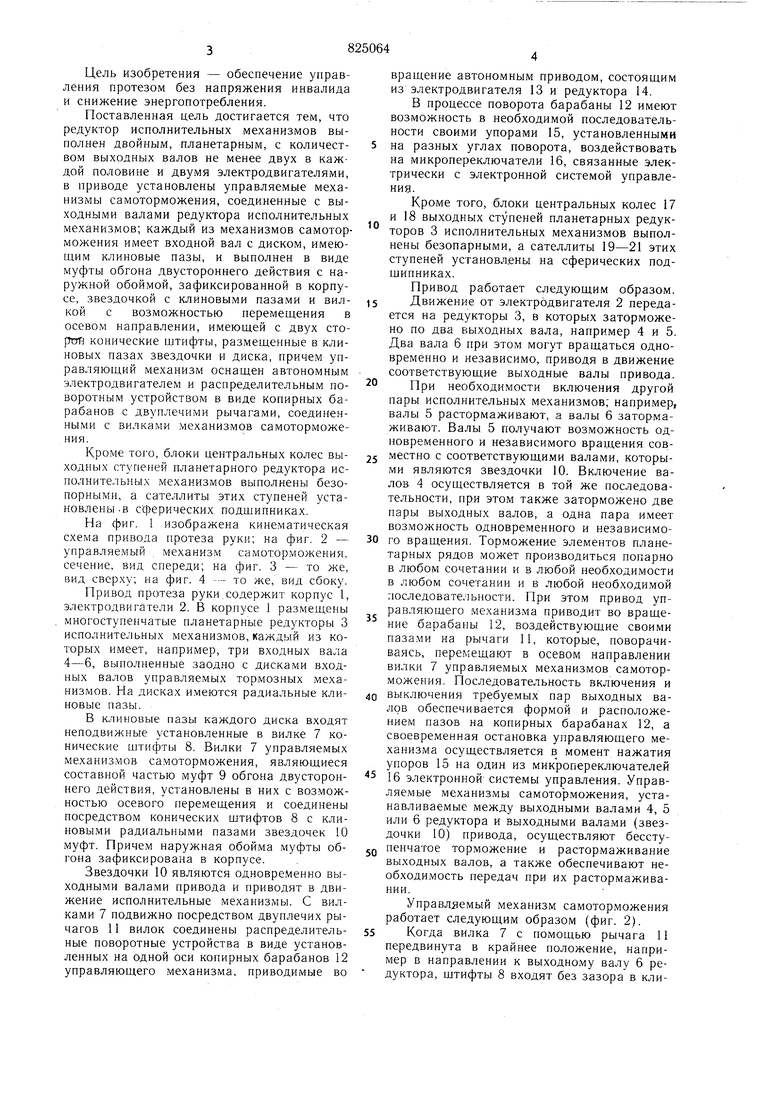
На фиг. 1 изображена кинематическая схема привода протеза руки; на фиг. 2 - управляемый механизм самоторможения, сечение, вид спереди; на фиг. 3 - то же, вид сверху; на фиг. 4 - то же, вид сбоку.
Привод протеза руки,содержит корпус 1, электродвигатели 2. В корпусе 1 размещены многоступенчатые планетарные редукторы 3 испо;1нительных механизмов, каждый из которых имеет, например, три входных вала 4-6, выполненные заодно с диска.ми входных валов управляемых тормозных механизмов. На дисках имеются радиальные клиновые пазы.
В клиновые пазы каждого диска входят неподвижные установленные в вилке 7 конические щтифты 8. Вилки 7 управляемых механизмов самоторможения, являющиеся составной частью муфт 9 обгона двустороннего действия, установлены в них с возможностью осевого перемещения и соединены посредством конических щтифтов 8 с клиновы.ми радиальными пазами звездочек 10 муфт. Причем наружная обойма муфты обгона зафиксирована в корпусе.
Звездочки 10 являются одновременно выходными валами привода и приводят в движение исполнительные механизмы. С вилками 7 подвижно посредством двуплечих рычагов 11 вилок соединены распределительные поворотные устройства в виде установленных на одной оси копирных барабанов 12 управляющего механизма, приводимые во
вращение автономным приводом, состоящим из электродвигателя 13 и редуктора 14.
В процессе поворота барабаны 12 имеют возможность в необходимой последовательности своими упорами 15, установленными
на разных углах поворота, воздействовать на микропереключатели 16, связанные электрически с электронной системой управления.
Кроме того, блоки центральных колес 17 и 18 выходных ступеней планетарных редукторов 3 исполнительных механизмов выполнены безопарными, а сателлиты 19-21 этих ступеней установлены на сферических подщипниках.
Привод работает следующим образом.
Движение от электродвигателя 2 передается на редукторы 3, в которых заторможено по два выходных вала, например 4 и 5. Два вала 6 при этом могут вращаться одновременно и независимо, приводя в движение соответствующие выходные валы привода.
При необходимости включения другой пары исполнительных механизмов; например, валы 5 растормаживают, а валы 6 затормаживают. Валы 5 получают возможность одновременного и независимого вращения совместно с соответствующими валами, которыми являются звездочки 10. Включение валов 4 осуществляется в той же последовательности, при этом также заторможено две пары выходных валов, а одна пара имеет возможность одновременного и независимого вращения. Торможение элементов планетарных рядов может производиться попарно в любом сочетании и в любой необходимости в любом сочетании и в любой необходимой последовательности. При этом привод управляющего .механизма приводит во вращение барабаны 12, воздействующие своими пазами на рычаги 11, которые, поворачиваясь, перемещают в осевом направлении вилки 7 управляемых механизмов самоторможения. Последовательность включения и
0 выключения требуемых пар выходных валов обеспечивается формой и расположением пазов на копирных барабанах 12, а своевременная остановка управляющего механизма осуществляется в момент нажатия упоров 15 на один из микропереключателей
5 16 электронной системы управления. Управляемые .механизмы самоторможения, устанавливаемые между выходными валами 4, 5 или 6 редуктора и выходными валами (звездочки 10) привода, осуществляют бесстуQ пенчатое торможение и растормаживание выходных валов, а также обеспечивают необходи.мость передач при их растормаживании.
Управляемый механизм самоторможения работает следующим образом (фиг. 2).
5 Когда вилка 7 с помощью рычага 11 передвинута в крайнее положение, например в направлении к выходному валу 6 редуктора, щтифты 8 входят без зазора в клиновые пазы диска механизма, связанного с этим валом. При этом вилка 7 может поворачиваться совместно с валом 6 в пределах зазора между штифтами 8, установленными с другой стороны вилки 7, и клиновыми пазами звездочки 10 муфты обгона двустороннего действия. Этот зазор обеспечивает поворот вилки настолько, чтобы расклинить ролики муфты 9 и обеспечить вращение выходного вала привода. Движение свободно передается от вала б редуктора через штифты 8 звездочке 10, а следовательно, выходному валу привода. При выключении электродвигателя муфта обгона двустороннего действия обеспечивает необратимость передачи. После перемещения вилки 7 в направлении к звездочке 10, выбирается зазор между штифтами и клиновыми пазами звездочки (фиг. 2), при этом выходной вал 6, воздействуя на вилку 7, не может ее повернуть, так как она связана без зазора со звездочкой 10, которая заклинена с помощью роликов на наружную обойму муфты 9, причем обойма неподвижно закреплена в корпусе 1 привода. Выходной вал редуктора оказывается заторможенным, а следовательно, осуществляется торможение элементов планетарного ряда, причем выходной вал привода также 3 заторможен с помощью муфты 9.
Переключение управляемого механизма самоторможения происходит без участия внешней нагрузки. Вилка 7 в процессе осевого перемещения разворачивается в пределах зазора между штифтами 8 и клиновыми пазами диска вала 6 или звездочки 10 в зависимости от исходного положения вилки, что обеспечивает надежное и точное переключение.
Для уменьшения размеров редукторов в приводе применено выравнивание нагрузки на сателлитах 19-21 выходных ступеней. Для этого блоки центральных колес 17 и 18 выполнены плавающими, устанавливаемыми на сателлитах 19-21 соответственно, которые в свою очередь установлены на сферических опорах. В зацеплении каждого выходного вала в этом случае участвует одновременно несколько зубчатых колес, что обеспечивает величину коэффициента неравномерностей нагрузки на сателлитах близкой к единице. Модуль зацепления может быть существенно .понижен, а весогабаритные характеристики уменьщены.
Технико-экономическая эффективность устройства заключается в том, что оно обеспечивает одновременную и независимую работу пар исполнительных механизмов без увеличения напряженности в работе оператора.
Коэффициент полезного действия привода имеет высокое значение, так как он состоит из передачи типа 2К-Н, каждая из которых имеет КПД колеблющийся от 0,97 до 0,99 в зависимости от их передаточного отнощения (1,14-8). Причем КПД муфты обгона двустороннего действия достигает величины не ниже 0,97. Все это способствует снижению энергопотребления привода в целом.
Использование планетарных передач обеспечивает снижение веса привода в 2- 6 раз, причем планетарные передачи позволяют повысить погрузочную способность зацеплений, что.невоз.можло или нерационально в обычных пределах.
15
Формула изобретения
0 редуктором и микропереключателями, отличающийся тем, что с целью обеспечения управления протезом без напряжения инвалида и снижения энергопотребления, редуктор исполнительных механизмов выполнен
5 двойным, планетарным, с количеством выходных валов не менее двух в каждой половине и двумя электродвигателями, в приводе установлены управляемые механизмы самоторможения, соединенные с выходными валами редуктора исполнительных меха0низмов; каждый из .механизмов самоторможения имеет входной вал с диском, имеющим клиновые пазы, и выполнен в виде муфты обгона двухстороннего действия с наружной обоймой, зафиксированной в корпусе,
5 звездочкой с клиновыми пазами и вилкой с возможностью перемещения в осевом направлении, имеющей с двух сторон конические щтифты, размещенные в клиновых пазах звездочки и диска, причем управляющий механизм оснащен автономным электро0двигателем и распределительным поворотным устройством в виде копирных барабанов с двуплечими рычагами, соединенными с вилками механизмов самоторможения.
5 выходных ступеней планетарного редуктора исполнительных механизмов выполнены безопорными, а сателлиты этих ступеней установлены на сферических подшипниках.
Источники информации, принятые во внимание при экспертизе 1. Авторской свидетельство СССР № 614793, кл. А 61 F 1/06, 1977.
/I III
Ю
9 7 if- 21 IS 20 /7 i3
5 9uiA
8 7
