4 6
7 6
N9
О
сх
4
ь:
5
Ф//г./
Изобретение относится к машиностроению и может быть использовано для управ.тяемого соединения звеньев незамкнутых многозвенных механизмов, например, в манипуляторах промышленных роботов.
Цель изобретения - расширение функциональных возможностей за счет увеличения грузоподъемности и уменьшения погрешности позиционирования.
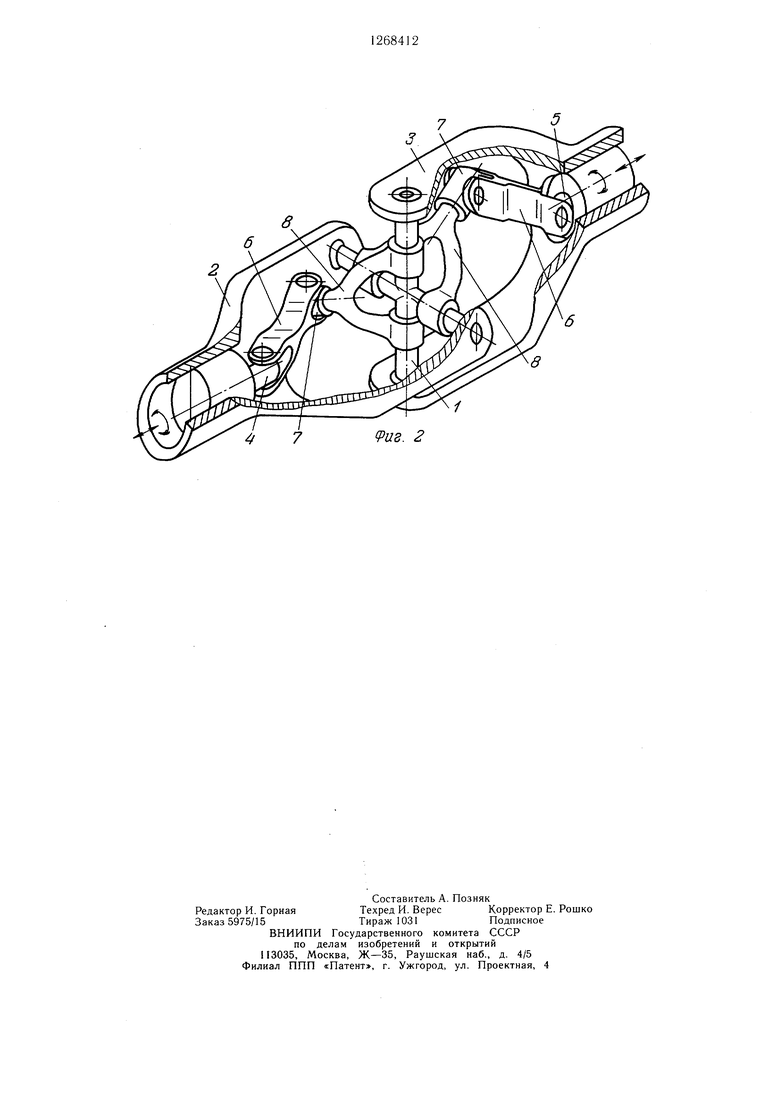
На фиг. 1 показан шарнирный механизм, разрез; на фиг. 2 - то же, аксонометрическая проекция.
Шарнирный механизм манипулятора (фиг. 1) содержит крестовину 1 универсального шарнира, корпуса 2 и 3, являющиеся частью подвижных звеньев манипулятора, и приводы поворота, выполненные в виде валов 4 и 5, установленных в корпусах с возможностью осевого перемешения. Валы посредством кинематической цепи, состоящей из тяг 6, втулок 7 и вилок 8, связаны с крестовиной 1 универсального шарнира. Вилки 8 установлены симметрично относительно центра крестовины и соединены с ее осями шарнирно, а также установлены своими осями во втулках 7 с возможностью вращения, а втулки 7 соединены с ведушими валами посредством тяг 6, также шарнирно установленных на валах и втулках, причем оси шарниров каждой тяги 6 находятся в одной плоскости.
Шарнирный механизм работает следующим образом.
При врашении одного из валов (например, 4) ось вилки 8, составляющая с упомянуты.м валом некоторый угол, определяемый положением вала в корпусе, посредством тяги 6 описывает в пространстве конус с вершиной в центре крестовины 1 универсального щарнира. Поэтому вилка 8, охватывая ось крестовины 1, поворачивает ее, а следовательно, и корпус 3, соединенный с ней, вокруг другой оси крестовины 1, Qiapнирно установленной в корпусе 2. При одновременном вращении валов 4 и 5 происходит поворот корпуса 2 относительно корпуса 3 по траектории, являющейся результирующей поворота корпусов вокруг взаимно перпендикулярных осей крестовины 1.
В зависимости от положения вилок 8 относительно осей крестовины 1, вокруг которых происходит поворот, одинаковые углы вращения приводных валов 4 и 5 вызывают различ.ные перемещения корпусов 2 и 3. В положении, когда ось вилки 8 перпендикулярна оси крестовины 1, вокруг которой происходит поворот, перемещение корпуса 2 или 3 минимально, в положениях.
когда ось вилки 8 составляет с осью крестовины 1 некоторый минимальный угол, обусловленный положением приводного вала (4 или 5) в корпусе 2 или 3 и конкретными размерами вилок 8 и тяг 6, перемещение максимально.
Вращение приводных валов 4 и 5 на 180° с постоянной скоростью, обеспечивает поворот корпуса 2 относительно корпуса 3 с перемещениями, практически равными нулю в крайних положениях, соответствующих наибольшему углу поворота корпусов 2 и 3. Учитывая, что вращение валов 4 и 5 на 180° осуществляется от упора до упора, а погрешность угла вращения валов 4 и 5
, сказывается на погрещности поворота корпусов 2 и 3 все меньше по мере приближения их к крайним положениям, фиксация конечных перемещений корпусов 2 и 3 может быть очень точной, т.е. достигается весьма малая погрещность позиционирования.
Осевым перемещением приводных валов 4 и 5 можно менять телесный угол, описываемый осями вилок 8, и следовательно, можно менять в щироких пределах взаимное перемещение корпусов 2 и 3. Осевое перемещение валов 4 и 5 может осуществляться при наладке манипулятора или во время его работы специальным устройством (не показано) по программе, при этом достигается любая траектория перемешения корпуса 2
относительно корпуса 3 в пределах телесного угла с центром на пересечении осей крестовины 1.
Формула изобретения
Шарнирный механизм манипулятора, содержащий два полых звена (корпуса), соединенных между собой крестовиной универсального шарнира, и приводы их относительного поворота, размещенные в каждо.м корпусе, отличающийся тем, что, с целью расщирения функциональных воз.можностей за счет увеличения грузоподъемности и уменьшения погрешности позиционирования, каждьЕЙ привод относительного поворота
снабжен вилкой, шарнирно соединенной с соответствующей осью крестовины универсального шарнира, и тягой, соединяюшей вилку с валом привода поворота, установленного с возможностью установочного осевого перемешения, причем оси симметрии вилок и продольные оси приводных валов проходят через точку пересечения осей крестовины шарнира. сраг. 2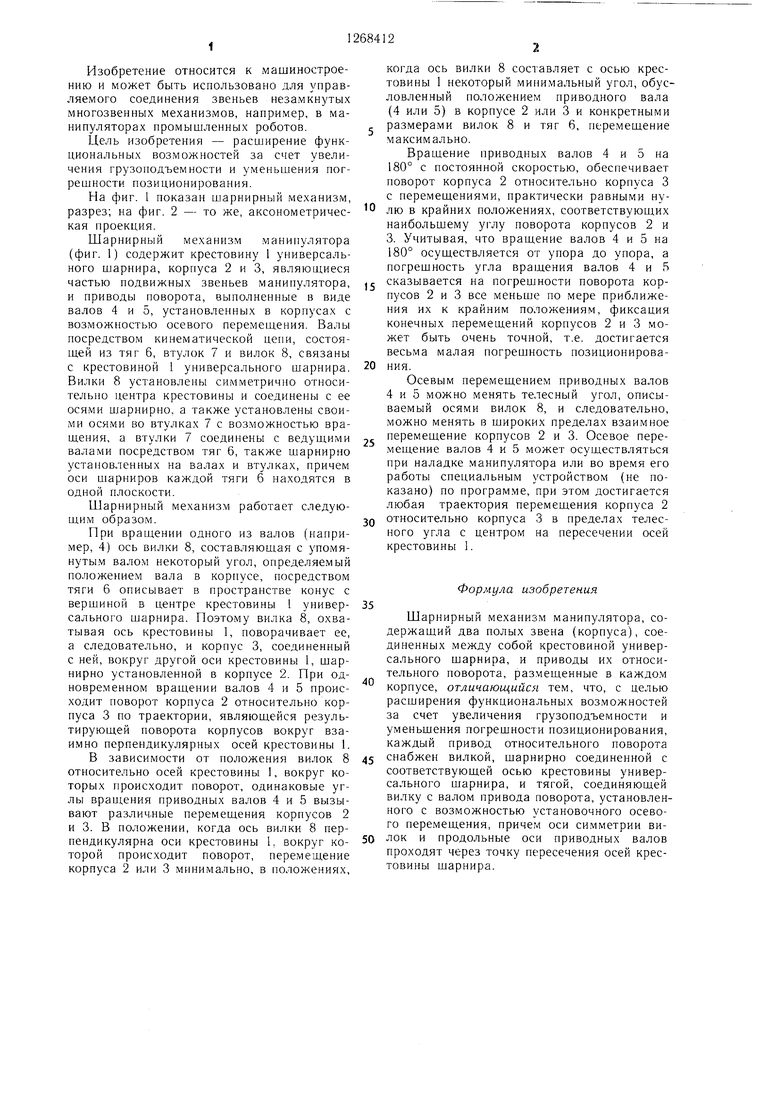
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МУФТА РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ И РЕГУЛИРУЮЩАЯ СИСТЕМА ДЛЯ НЕЕ | 2002 |
|
RU2292494C2 |
| РАМА ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 2006 |
|
RU2325792C1 |
| Синхронный шарнир | 1989 |
|
SU1796786A1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| ГИБКАЯ ВОЛНОВОДНАЯ СЕКЦИЯ | 1982 |
|
SU1840291A1 |
| Мезанизм шарнира манипулятора | 1979 |
|
SU848356A2 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| Привод манипулятора | 1982 |
|
SU1114544A2 |
| СИНХРОННАЯ МУФТА | 2015 |
|
RU2585430C1 |
Изобретение относится к области машиностроения и может быть использовано для управляемого соединения звеньев незамкнутых многозвенных механизмов, например, в манипуляторах промышленных роботов. Цель изобретения - расширение функциональных возможностей за счет увеличения грузоподъемности и уменьшения погрешности позиционирования. При вращении одного из валов, например 4, ось вилки 8, составляющая с этим валом угол, определяемый положением вала в корпусе, посредством тяги 6 описывает в пространстве конус с верщиной в центре крестовины 1 универсального щарнира. Поэтому вилка 8, охватывая ось крестовины 1, поворачивает ее, а следовательно, и корпус 3, соединенный с ней, вокруг другой оси крестовины 1, шарнирно установленной в корпусе 2. При одновременном вращении валов 4 и 5 происходит поворот корпуса 2 относительно корпуса 3 по траектории, являющейся результирующей поворота корпусов вокруг взаимно перпендикулярных осей крестовины 1. 2 ил. 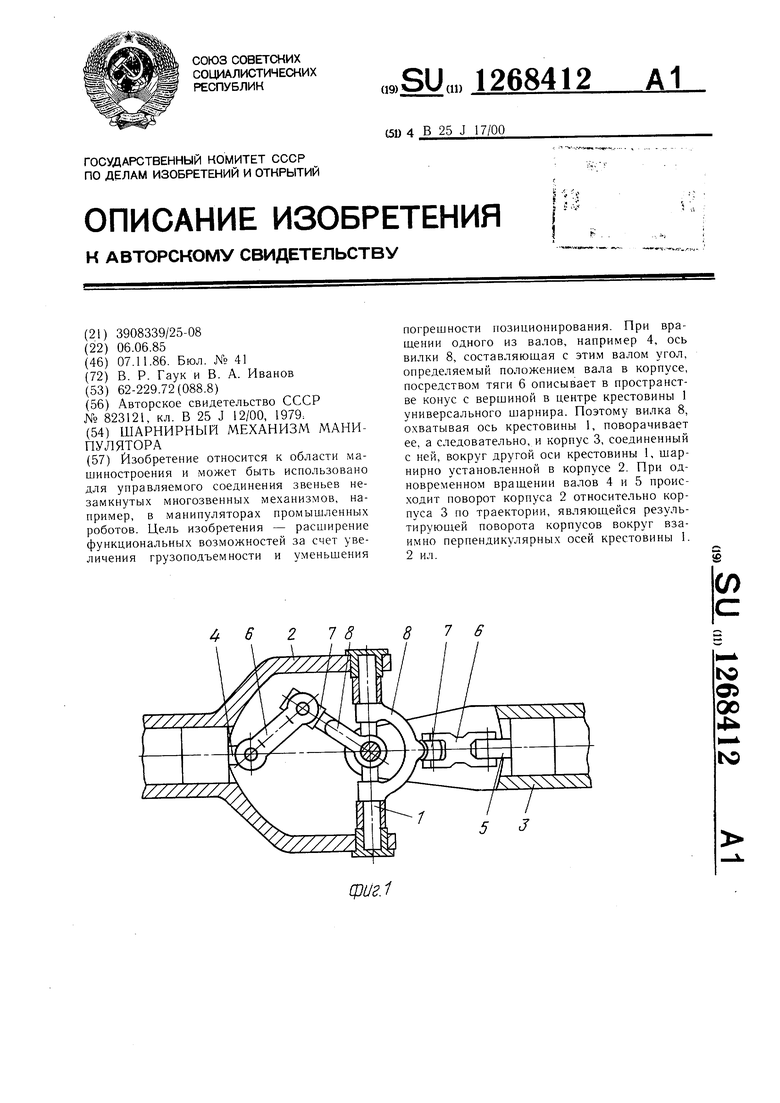
| Шарнирный механизм манипулятора | 1979 |
|
SU823121A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
