Изобретение относится к механическим системам параллельной структуры, применяемым в технике для получения заданного движения выходного элемента.
Известен манипулятор параллельной структуры «Дельта-робот» [Azad F.A., Rahimi S., Hairi Yazdi M.R., Masouleh M.T. Design and evaluation of adaptive and sliding mode control for a 3-DOF Delta parallel robot. Proceedings of the 28th Iranian Conference on Electrical Engineering (ICEE), 2020, pp.1-7; Fig. 1]. Манипулятор состоит из неподвижного звена (стойки) и выходного звена (платформы), между которыми установлено три кинематические цепи, каждая из которых снабжена приводом. Недостатком такого манипулятора является отсутствие вращательных степеней свободы выходного звена.
Также известен «Дельта-робот» с линейными приводами [Carabin G., Scalera L., Wongratanaphisan Т., Vidoni R. An energy-efficient approach for 3D printing with a Linear Delta Robot equipped with optimal springs. Robotics and Computer-Integrated Manufacturing, 2021, 67, 102045; Fig. 1]. Он состоит из стойки и платформы (выходного звена), между которыми установлены три кинематические цепи, каждая из которых включает направляющую, жестко установленную на стойке, трехпарный (образующий с сопрягаемыми звеньями три кинематические пары) ползун и пару штанг. Каждая кинематическая цепь снабжена линейным приводом, а выходному звену обеспечиваются три поступательные степени свободы. Недостаток устройства состоит в полном отсутствии вращательных степеней свободы выходного звена. Данный недостаток ограничивает возможности практического применения прототипа.
Наиболее близким к заявляемому устройству является четырехподвижный механизм [Патент РФ №196059. Пространственный механизм с четырьмя степенями свободы. Глазунов В.А., Борисов В.А.; заявитель и патентообладатель ФГБУН «Институт машиноведения им. А.А. Благонравова Российской академии наук (ИМАШ РАН)». - №2019136996; заяв. 19.11.2019; опубл. 14.02.2020, Бюл. №5 - 5 с.; 1 ил.], принимаемый за прототип предлагаемого устройства. Механизм состоит из стойки, платформы и выходного элемента, причем стойка и платформа связаны между собой четырьмя кинематическими цепями, каждая из которых состоит из направляющей, жестко зафиксированной на стойке, ползуна, расположенного на направляющей с возможностью перемещения по нему, и штанги, выполненной в виде гибкого звена и соединенной с ползуном и с платформой посредством сферических шарниров, при этом ползуны выполнены двухпарными (образующими с сопрягаемыми звеньями две кинематические пары).
Недостаток прототипа заключается в отсутствии пятой степени свободы, обеспечивающей поворот выходного элемента вокруг второй горизонтальной оси, что ограничивает некоторые возможности практического применения прототипа.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании такого механизма, в котором кроме трех поступательных и одной вращательной степеней свободы выходного элемента, также бы обеспечивалось дополнительное вращение вокруг горизонтальной оси.
Данная проблема решается тем, что в предлагаемом пятиподвижном пространственном механизме с приводной избыточностью, содержащем стойку, платформу и выходной элемент, причем стойка и платформа связаны между собой четырьмя кинематическими цепями, каждая из которых состоит из направляющей, жестко зафиксированной на стойке, ползуна, расположенного на направляющей с возможностью перемещения по нему, и штанги, соединенной с ползуном и с платформой посредством сферических шарниров, при этом ползуны двух из упомянутых четырех кинематических цепей выполнены двухпарными, согласно изобретению, он снабжен рычагом, связанным с платформой посредством вращательных шарниров, а ползуны остальных кинематических цепей выполнены трехпарными и каждый из них снабжен дополнительной кинематической цепью, включающей в себя верхнюю крестовину, вилку, связанную посредством вращательных шарниров с трехпарным ползуном и с верхней крестовиной, нижнюю крестовину, соединенную с помощью вращательного шарнира с соответствующим концом упомянутого рычага, и стержень, соединенный посредством вращательных шарниров с верхней и нижней крестовинами, при этом выходной элемент жестко закреплен на рычаге.
Технический результат, получаемый при использовании предлагаемого устройства, заключается в обеспечении дополнительной вращательной степени свободы выходного элемента вокруг горизонтальной оси. Данное преимущество способствует расширению возможностей практического применения предлагаемого механизма.
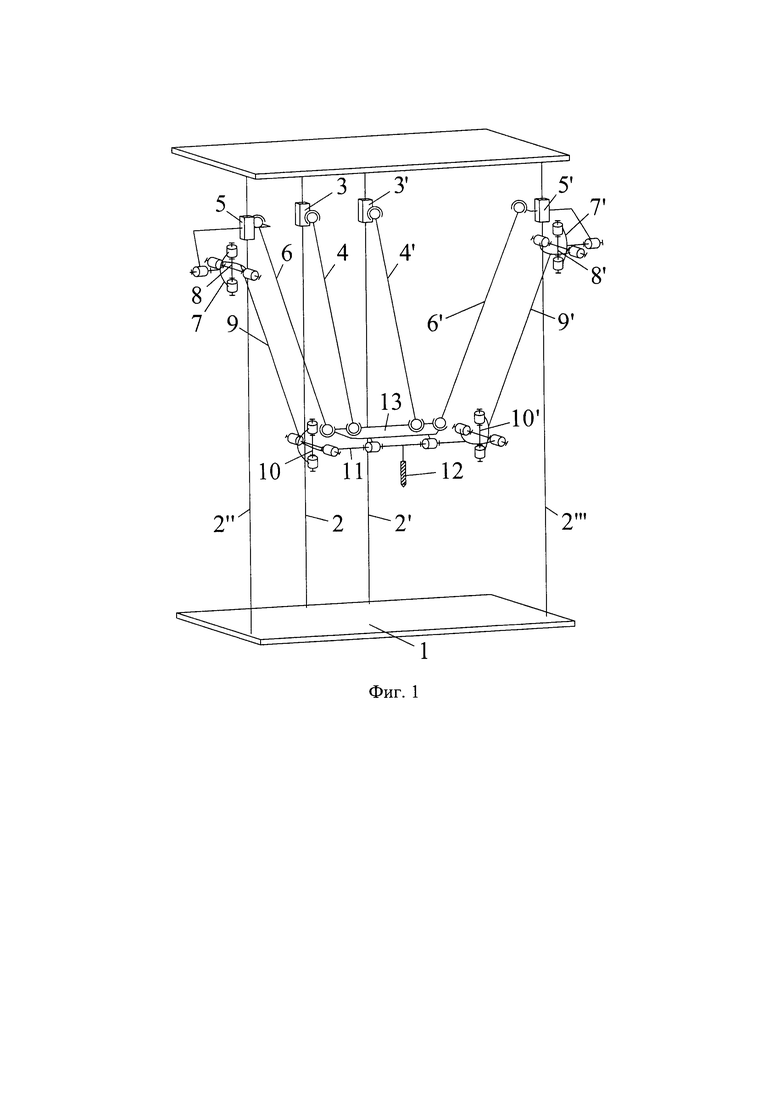
Изобретение поясняется чертежом, где на фиг.1 показана кинематическая схема пятиподвижного пространственного механизма с приводной избыточностью. Механизм включает в свой состав неподвижное звено (стойку) 1 и платформу 13, между которыми установлены четыре кинематические цепи. Цепи выполнены двух типов. Цепи первого типа состоят из направляющих 2 и 2', жестко установленных на стойке 1, двухпарных ползунов 3 и 3' и штанг 4 и 4'. Цепи второго типа состоят из направляющих 2'' и 2''', жестко установленных на стойке 1, трехпарных ползунов 5 и 5', штанг 6 и 6', а также групп звеньев, состоящих из вилок 7 и 7', верхних крестовин 8 и 8', стержней 9 и 9' и нижних крестовин 10 и 10'. Причем нижние крестовины 10 и 10' сопряжены между собой рычагом 11, на котором жестко установлен выходной элемент 12.
Двухпарные и трехпарные ползуны 3, 3', 5 и 5', а также вилки 7 и 7' являются приводными звеньями, которым задаются входные движения. Направляющие 2, 2', 2'', 2''' и двухпарные и трехпарные ползуны 3, 3', 5, 5' образуют поступательные шарниры. Двухпарные и трехпарные ползуны 3, 3', 5, 5' и штанги 4, 4', 6, 6'; штанги 4, 4', 6, 6' и платформа 13 образуют сферические шарниры. Трехпарные ползуны 5, 5' и вилки 7, 7'; вилки 7, 7' и верхние крестовины 8, 8'; верхние крестовины 8, 8' и стержни 9, 9'; стержни 9, 9' и нижние крестовины 10, 10'; нижние крестовины 10, 10' и рычаг 11; рычаг 11 и платформа 13 образуют вращательные шарниры.
Принцип работы предлагаемого механизма заключается в следующем. При смещении двухпарных и трехпарных ползунов 3, 3', 5 и 5' относительно направляющих 2, 2', 2'' и 2''', жестко установленных на стойке 1, движение передается на штанги 4, 4', 6 и 6', а также на группы звеньев, состоящие из вилок 7 и 7', верхних крестовин 8 и 8', стержней 9 и 9', нижних крестовин 10 и 10', сопряженных между собой рычагом 11 с жестко установленным выходным элементом 12, взаимодействующим с платформой 13. Так обеспечиваются четыре степени свободы платформе 13 и выходному элементу 12 (три линейных смещения и поворот относительно оси, параллельной осям вращательных шарниров 10-11 и 10'-11). Пятая степень свободы (поворот выходного элемента 12 вокруг осей вращательных шарниров 11-13) обеспечивается за счет кинематических цепей, включающих вилки 7 и 7', верхние крестовины 8 и 8', стержни 9 и 9', нижние крестовины 10 и 10', сопряженные между собой рычагом 11. В данных цепях при одновременном повороте вилок 7 и 7', движение через верхние крестовины 8 и 8' передается на стержни 9 и 9' и далее через нижние крестовины 10 и 10' на рычаг 11 с жестко установленным на нем выходным элементом 12.
В связи с тем что пятая степень свободы обеспечивается за счет задания движения одновременно двум приводным звеньям (вилкам 7 и 7'), механизм обладает приводной избыточностью. Таким образом, в нем пять степеней свободы контролируются шестью приводным звеньями.
Предлагаемый механизм может быть применен при проектировании устройств и станков по обработке промышленных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2801186C1 |
| ПЯТИПОДВИЖНЫЙ МАНИПУЛЯТОР ДЛЯ ШЛИФОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2023 |
|
RU2799610C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО МАНИПУЛИРОВАНИЯ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2801187C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2023 |
|
RU2800733C1 |
| ЧЕТЫРЕХСАТЕЛЛИТНЫЙ ПЛАНЕТАРНЫЙ РЕДУКТОР | 2023 |
|
RU2811198C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2022 |
|
RU2784546C1 |
| ДВУХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2799609C1 |
| ШЕСТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2800735C1 |
Изобретение относится к области робототехники и может быть использовано в механических системах параллельной структуры. Пятиподвижный пространственный механизм содержит стойку, платформу и выходной элемент, причем стойка и платформа связаны между собой четырьмя кинематическими цепями, каждая из которых состоит из направляющей, жестко зафиксированной на стойке, ползуна, расположенного на направляющей с возможностью перемещения по нему, и штанги, соединенной с ползуном и платформой посредством сферических шарниров, при этом ползуны двух из упомянутых четырех кинематических цепей выполнены двухпарными. Механизм снабжен рычагом, связанным с платформой посредством вращательных шарниров, а ползуны остальных кинематических цепей выполнены трехпарными и каждый из них снабжен дополнительной кинематической цепью, включающей в себя верхнюю крестовину, вилку, связанную посредством вращательных шарниров с трехпарным ползуном и с верхней крестовиной, нижнюю крестовину, соединенную с помощью вращательного шарнира с соответствующим концом упомянутого рычага, и стержень, соединенный посредством вращательных шарниров с верхней и нижней крестовинами, при этом выходной элемент жестко закреплен на рычаге. Использование изобретения позволяет расширить технологические возможности механизма. 1 ил.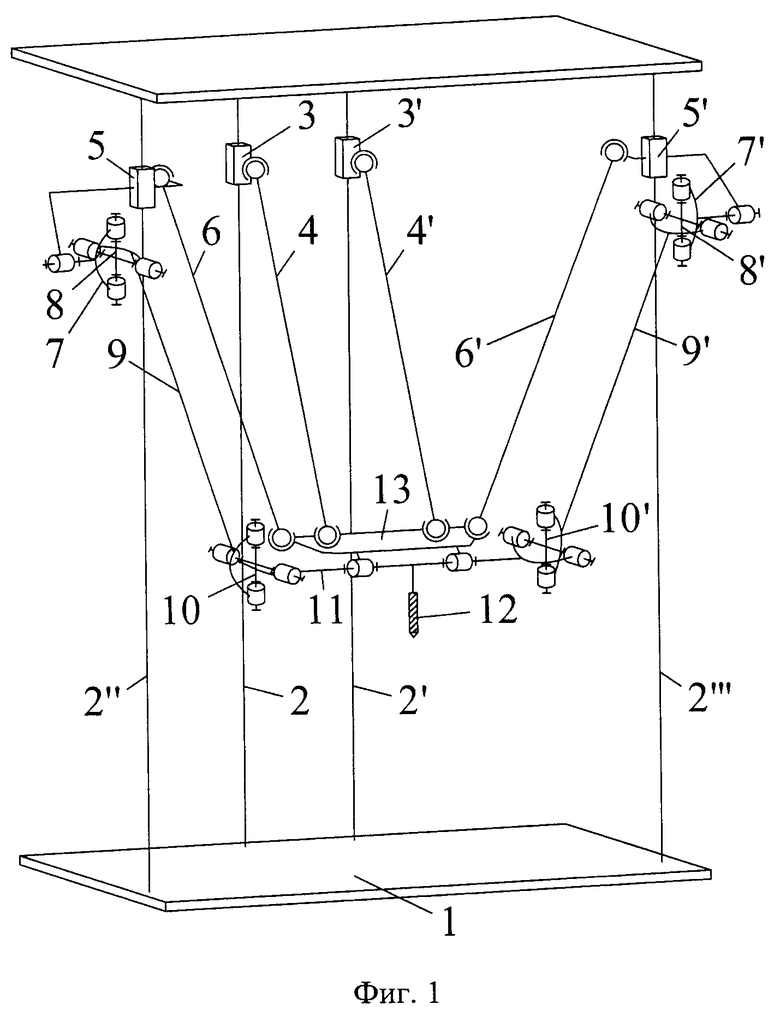
Пятиподвижный пространственный механизм с приводной избыточностью, содержащий стойку, платформу и выходной элемент, причем стойка и платформа связаны между собой четырьмя кинематическими цепями, каждая из которых состоит из направляющей, жестко зафиксированной на стойке, ползуна, расположенного на направляющей с возможностью перемещения по нему, и штанги, соединенной с ползуном и с платформой посредством сферических шарниров, при этом ползуны двух из упомянутых четырех кинематических цепей выполнены двухпарными, отличающийся тем, что он снабжен рычагом, связанным с платформой посредством вращательных шарниров, а ползуны остальных кинематических цепей выполнены трехпарными и каждый из них снабжен дополнительной кинематической цепью, включающей в себя верхнюю крестовину, вилку, связанную посредством вращательных шарниров с трехпарным ползуном и с верхней крестовиной, нижнюю крестовину, соединенную с помощью вращательного шарнира с соответствующим концом упомянутого рычага, и стержень, соединенный посредством вращательных шарниров с верхней и нижней крестовинами, при этом выходной элемент жестко закреплен на рычаге.
| СИСТЕМА ДЛЯ СМАЗКИ ХОЛОДИЛЬНОГО ТУРБОКОМПРЕССОРА | 0 |
|
SU196059A1 |
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| СПОСОБ ПОЛУЧЕНИЯ гуминовых кислот | 0 |
|
SU198352A1 |
| CN 106363605 A, 01.02.2017 | |||
| JP 2021074856 A, 20.05.2021. | |||

