1
Изобретение относится к области робототехники и может быть использовано в промышленных роботах различного назначения, манипуляторы которых включсшт шарнирно сочлененные звенья.
По основному авт. св. № 701793 известен механизм шарнира руки манипулятора, содержащий приводы, промежуточное звено, соединенное посредством крестовин с предыдущим и последующим звеньями руки и снабженное двуплечим рычагом, на концах кото- . рого смонтированы оси, причем первая ось связана с предыдущим звеном шарнирно, а вторая ось с последующим звеном - поступательной парой Щ.
Недостатком этого механизма iuapнира- является ограниченная маневренное ф , так как он,не обеспечивает вращение выходного (рабочего) звена, обеспечивая лишь его перемещение в любой плоскости по сфере.
Цель изобретения - повышение маневренности руки манипулятора за счет придания ей дополнительного вращения.
Для достижения этой цели механизм шарнира руки манипулятора снабжен смонтированным на предыдущем звене
приводом вращения с выходным валом, который через карданный шарнир связан с валом поступательной пары на одном конце двуплечего рычага, причем последняя снабжена скользящей шпонкой, а другой конец двуплечего рычага через карданный шарнир связан с последующим звеном.
10
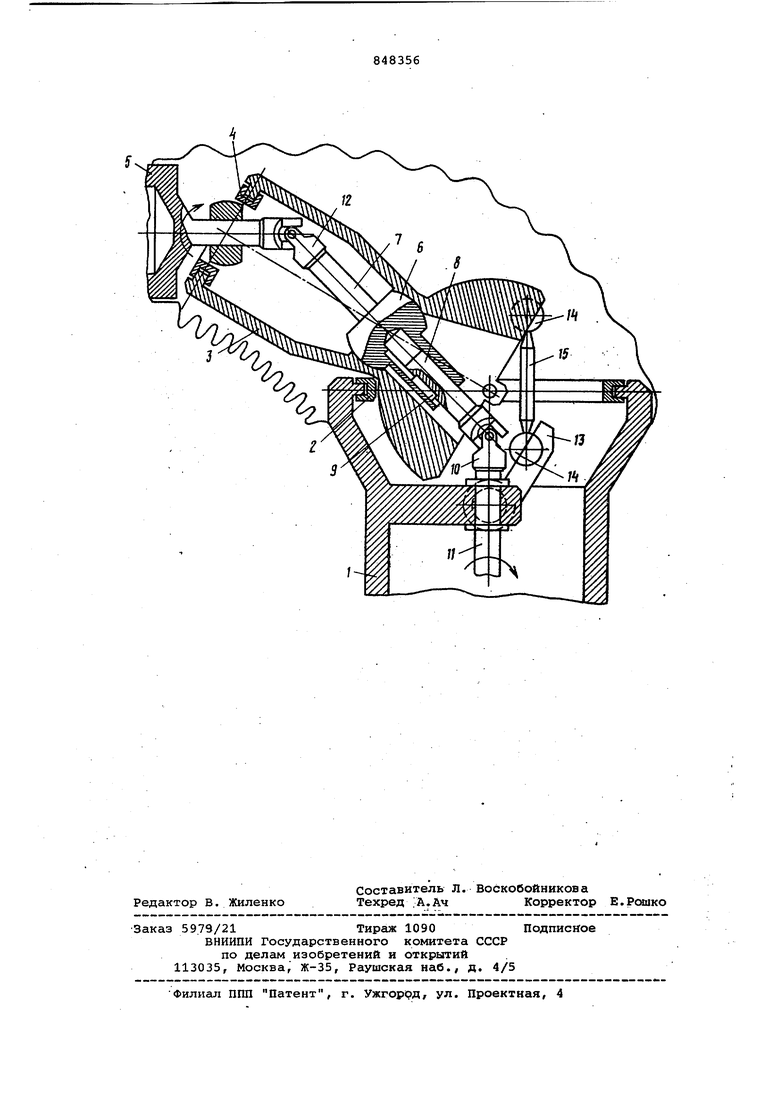
На чертеже изображена конструкция механизма шарнира руки манипулятора.
Механизм шарнира руки манипулятора содержит предьадущее звено 1, свя15занное шарнирно посредством крестовины 2 с промежуточным звеном 3, которое также шарнирно посредством крестовины 4 соединено с последукяцим звеном 5.
20
В промежуточном звене 3 при помощи сферической опоры, шарнира 6, закреплен двуплечий рычаг 7, на одном конце которого посредством поступательной пары смонтирован вал 8.
25 Вал 8 снабжен скользящей шпонкой 9 и соединен.карданным шарниром 10 с приводным валом 11 предыдущего звена 1. Другой конец двуплечего рыча- га 7 посредством карданного шарнира
30 12 связан с последующим звеном 5. На звене 1 закреплены рычаги 13, которые связаны сферическими шарнирами 14 с тягами 15 и с промежуто ным звеном 3. Механизм работает следующим образом. В исходном положении рычаги 13 и вал 11 зафиксированы. Поворот пос(ледующего звена 5 на максимальный угол, например в плоскости чертежа влево, осуществляется следующим образом. Рычаги 13 поворачиваются в плоскости чертежа на равные углы-про тив часовой стрелки, при этом промежуточное звено 3 тягами 15 поворачивается вокруг оси крестовины 2 на требуемый угол. Одновременно рычаг 7 поворачивается вокруг оси сферическо го шарнира б и поворачивает через карданный шарнир 12 звено 5 вокруг оси крестовины 4 в той же плоскости что и звено 3. Для вращения звена 5 включают при вод вращения (не показан), смонтированный на предьщущем звене 1, который вращает вал 11. Вращение вала 11 через карданный шарнир 10, вад 8 со скользящей шпонкой 9, двуплечий рычаг 7, карданный шарнир 12 переда ется последующему звену 5. При повороте последующего звена вправо работа механизма аналогична, только изменяется лишь направление вращения рычагов 13 привода. В этом случае рычаги 13 поворачиваются на одинаковые углы по часовой стрелке. При повороте звена 5 на максимал ный угол в плоскости, перпендикуляр ной плоскости чертежа, рычаги 13 по ворачиваются в плоскости чертежа на одинаковые углы, но в разные стороны, в этом случае промежуточное зве но 3 и звено 5 поворачиваются вокру осей крестовин 2 и 4,соответственно Для вращения звена 5 поступают аналогично: включают привод враще- i ния. При необходимости поворота звена 5 в любой плоскости под углом, не равным максимальному, рычаги 13 поворачиваются по часовой или против часовой стрелок в одну и ту же или в разные стороны, но на различные углы. При этом промежуточное звено 3 и звено 5 одновременно поворачиваются вокруг осей своих крестовин 2 и 4. Таким образом предлагаемый механизм шарнира руки манипулятора помимо перемещения последующего звена в любой плоскости по сфере обеспечивает его вращение, что повышает маневренность руки робота, следовательно, увеличивает его технологические возможности и расширяет область применения. Формула изобретения Механизм шарнира руки манипулятора по авт. св. № 701793, Q т л ичающийся тем, что, с целью повышения маневренности руки манипулятора за счет придания ей дополнительного вращения, механизм снабжен смонтированными на предьщущем звене приводом вращения с выходным валом, который через карданный шарнир связан с валом поступательной пары на одном конце двуплечего рычага, причем последняя снабжена скользящей шпонкой, а другой конец двуплечего рычага через к.арданный шарнир связан с последующим звеном. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 701793, кл. В 25 J 17/00, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм шарнира руки манипулятора | 1984 |
|
SU1214411A2 |
| Механизм шарнира руки манипуля-TOPA | 1979 |
|
SU848355A2 |
| Манипулятор | 1984 |
|
SU1273243A1 |
| Манипулятор | 1986 |
|
SU1351782A1 |
| Механизм шарнира руки манипулятора | 1978 |
|
SU701793A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Манипулятор | 1990 |
|
SU1759619A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПА | 1992 |
|
RU2032572C1 |
| Привод манипулятора | 1982 |
|
SU1114544A2 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |