Изобретение относится к промышлен ным роботам и манипуляторам и может быть использовано для автоматизации монотонных и вспомогательных операций. По основному авт. св. № 471189 из вестен привод манипулятора с подвижньми звеньями, содержащий вал, захват, зубчатые передачи и привод, выполненный в виде вращающихся валов и шарнирами Гука-Кардана,концентрически расположенным относительно од)гой оси СП., Недостатком известного устройства является отсутствие синхронности во вращении ведущего и ведомого валов в шарнире Гука, при этом трудно обеспечить точность позиционирования в одношарнирных манипуляторах. Кроме этого, угол изгиба руки манипулятора в шарнире ограничен допустимым углом изгиба карданной передачи. Целью изобретения является расширение зоны манипулирования. Цель достигается тем, что привод манипулятора с подвижньми звеньями. Содержащий вал, захват, зубчатые передачи и привод, выполненный в виде вращающихся валов с шарнирами ГукаКардана, концентрически расположенны относительно одной оси, шарнир ГукаКардана выпвлнен из вилок и двух кор пусов, при этом .корпуса состоят из двух полых, наружной и внутренней концентрических сфер, а вилки промежуто ных валов шарнира Гука-Кардана соединены дополнительными поступательными кинематическими парами. На фиг. 1 изображена схема привод манипулятора; на фиг. 2 - схема механизма поворота. Конструктивно привод манипулятора представляет собой следующее. Ведущи концентрически расположенные валы 1-3 (фиг. 1) соединены при помощи промежуточных валов 4 и 5 и крестовин 6, 7 и 8, 9 с ведомыми валами 10 и 11. Промежуточные валы 4 и 5 состоят из двух частей, соединенных между собой поступательными кинематическими парами. Устройство, обеспечивающее равенство установочных углов, состоит из двух.концентричных сфер 12 и 13, соединенных соответственно с неподвиж-ным корпусом 14 и подвижным 15. Коническое зубчатое колесо 16, жестко связанное с ведущим вплом 3, пходит в зацепление с 1 4 зубчатым сектором 17, жестко связанным с подвижным корпусом 15. Привод манипулятора работает следующим образом. Для поворота подвижного корпуса 15 относительно неподвижного корпуса 14 вокруг оси X задается вращение валу 3. Враи(ение на корпус 15 передается .через коническую пару 16 и 17. При повороте корпуса 15 относительновоси X элемент сферы 13 поворачивается относительно элемента 12, а длина промежуточных валов 4 и 5 изменяется. При этом обеспечивается равенство углов поворота корпуса 15 относительно валов 4 и 5 вокруг оси Xj и валов 4 и 5 относительно корпуса 14 вокруг оси Х/1 . Следовательно, соблюдается равенство установочных углов oi., зС2 двойной карданной передачи (фиг. 2), что является условием равенства угловых скоростей ведущих валов 1 и 2 и ведомых 10 и 11, а следовательно, и условием, исключающим взаимовлияние движения одних звеньев на другие, т.е. исключающим эффект наложения кинематических связей. Цри этом удваивает свое значение угол поворота корпу.а 15 относительно корпуса 14, он равен 2oi ы oL d,), что приводит к расширению рабочего пространства манипулятора. В связи с использованием в качестве шарнира в приводе манипулятора двойной карданной передачи и, следовательно, с увеличением угла изгиба в шарнире значительно расширяется рабочая зона такого манипулятора. Коэффициент сервиса, характеризующий геометрические качества манипулятора, увеличивается в 4,07 раза.. Кроме того, устраняется неравномерность вращения ведомых валов привода, что позволяет увеличить точность позиционирования захвата манипулятора, ликвидировать динамические нагрузки, возникаю1цие вследствие неравномерности вращения, что ведет к увеличению долговечности деталей карданных шарниров привода, а следовательно, увеличивается надежность и срок службы манипуляторя. В целом, использование изобретения позволит расширить область применения шарнирных манипуляторов с электромеханическим приводом.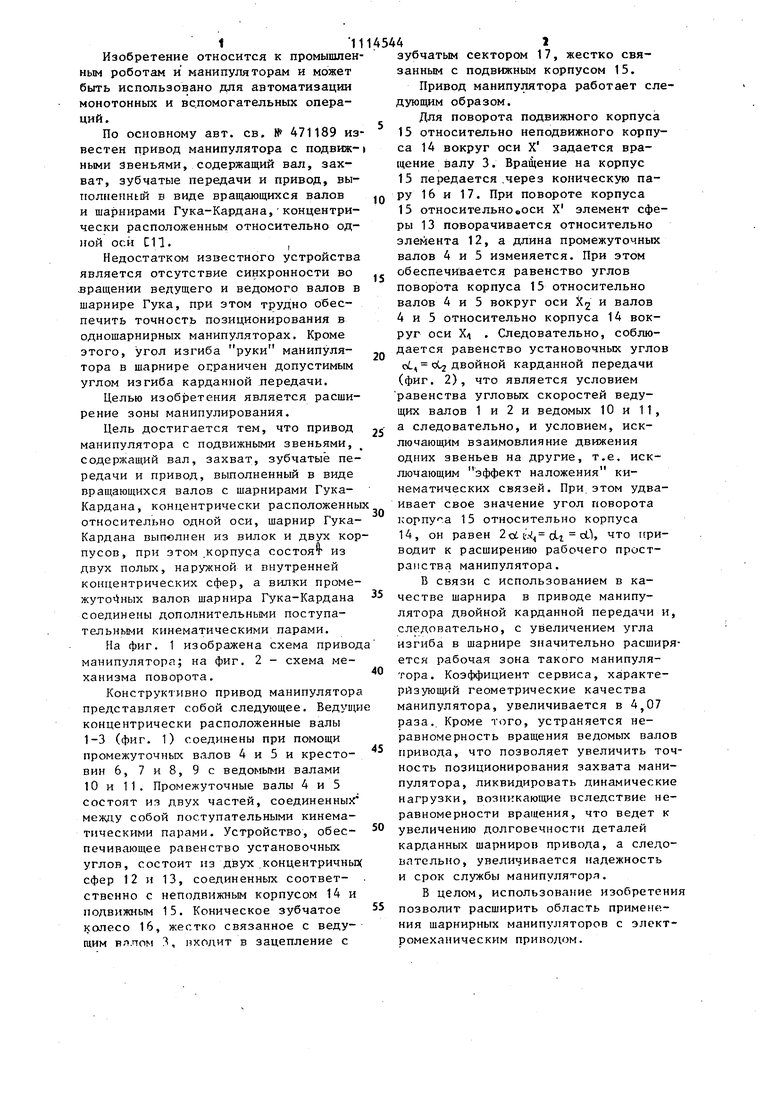
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1982 |
|
SU1050862A2 |
| Манипулятор | 1990 |
|
SU1759619A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| ШАРНИР МАНИПУЛЯТОРА (ВАРИАНТЫ) | 2005 |
|
RU2284896C1 |
| СДВОЕННЫЙ ШАРНИР /ЕГО ВАРИАНТЫ/ | 2006 |
|
RU2303719C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| ШАРНИР РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ | 2010 |
|
RU2431065C1 |
ПРИВОД МАНИПУЛЯТОРА по авт. св. № 471189, отличающийся тем, что, с целью расширения зоны манипулирования, шарнир Гука-Кардана выполнен из вилок и двух корпусов, при этом, корпуса состоят из двух полых, наружной и внутренней концентрических сфер, а вилки промежуточных валов шарнира Гука-Кардана соединены дополнительными поступательными кинематическими парами.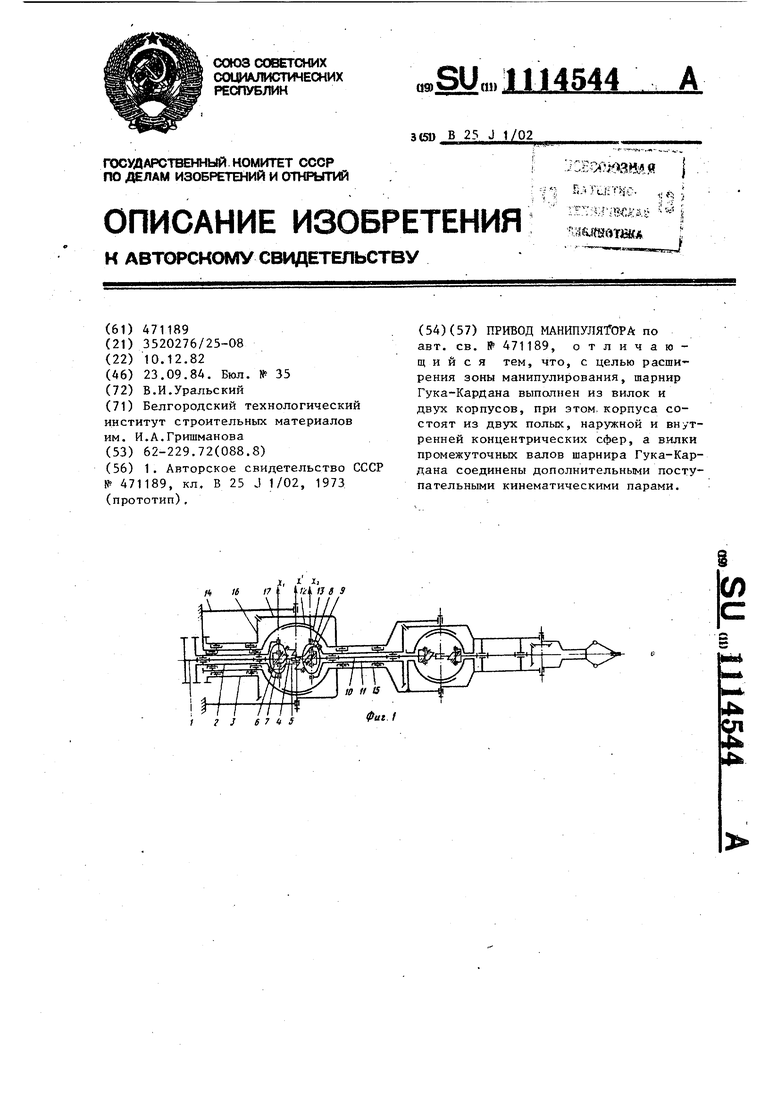
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод манипулятора | 1973 |
|
SU471189A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
