to
о со ;о
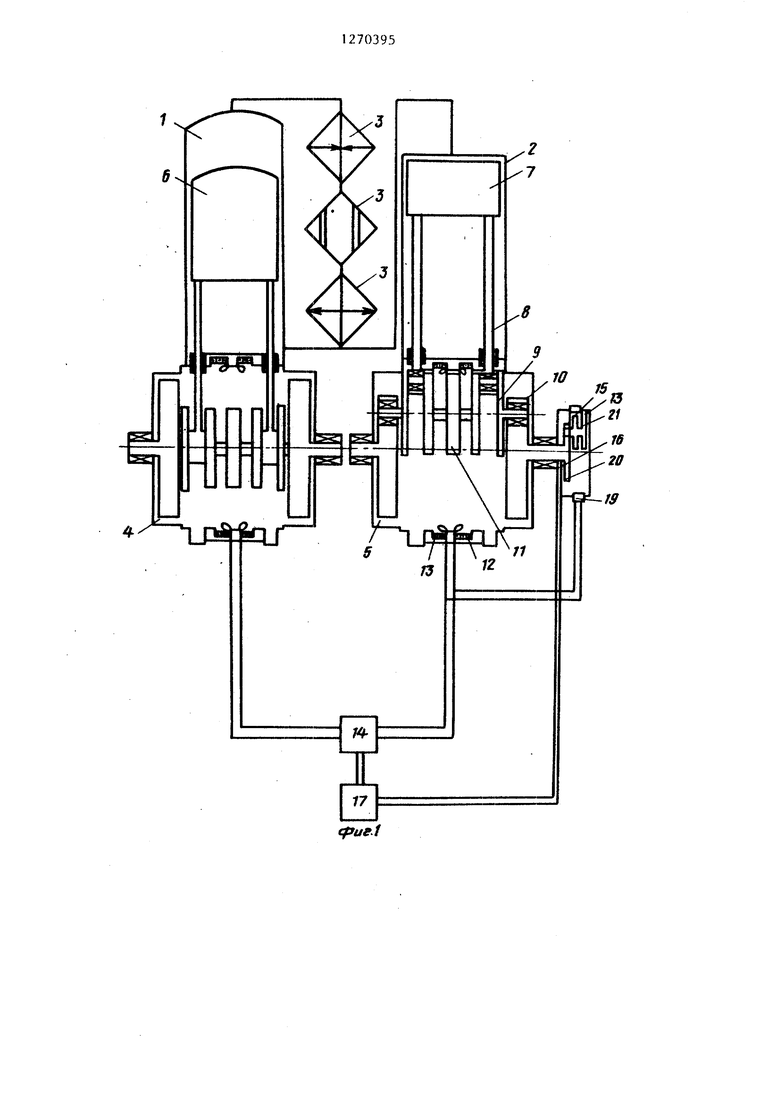
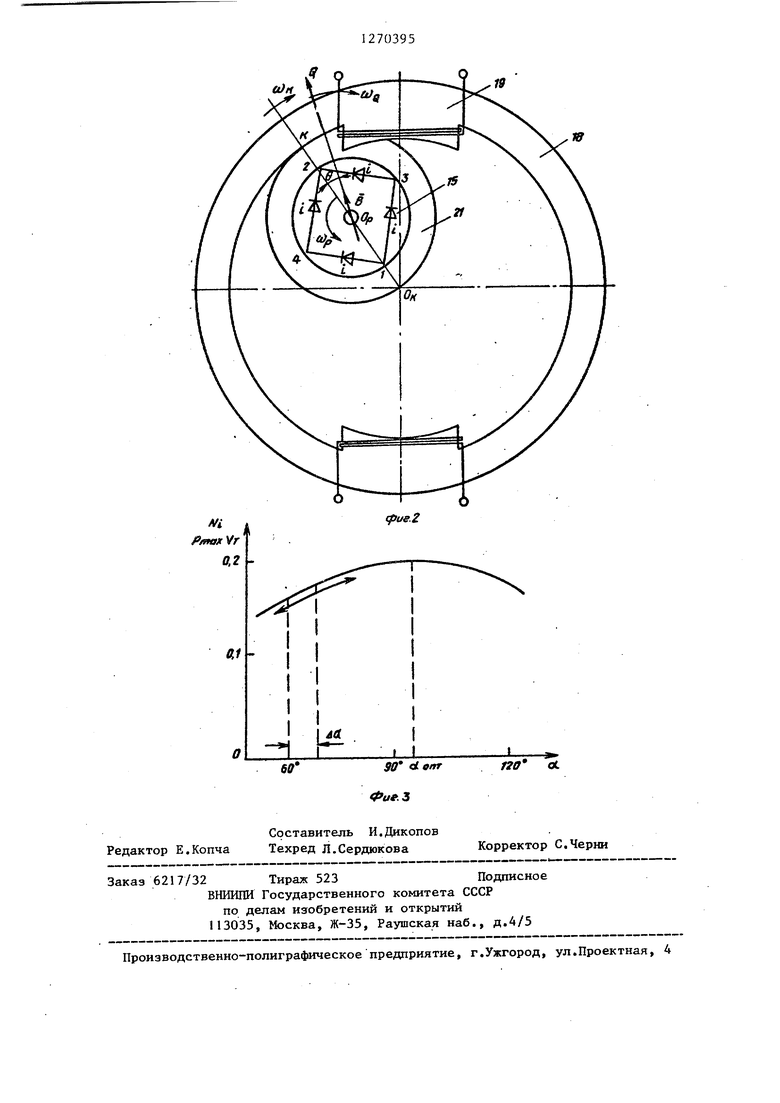
О1 I1 Изобретение относится к машиностроению, а именно к двигателеютроению, и может быть использовано при создании двигателей с внешним подводом тепла. Цель изобретения - повышение экономичности двигателя путем ухпгчшения согласования сдвига фаз движения поршней. На фиг. 1 изображена принципиальная схема устройства двигателя Стирлинга для осуществления предлагаемого способа; на фиг. 2 и 3 - схема используемого датчика Двигатель Стирлинга содержат по меньшей мере одИу пару цшткцров 1 и 2, установленных на картере и сообщенных между собой газовой связью через теплообменные аппараты 3, Картер двигателя вьшолнен в виде двух раздельнь х герметичных блоков 4 и 5 „ В цилиндрах I и 2 двигателя размещены с возможностью перемещения вытеснительный 6 и рабочий 7 поршень, свя занные через штоки 8 с сателпитиыми колесами 9 гипоциклоидальных механизмов привода,, размещенных з блоках 4 и 5 картера. Сателлитньге колзса 9 установлены на шатунных шейках колеи чатсто вала 0 каждого из механизиов привода на опорах качения и имеют возможность катиться по направляюг щм блоков 4 и 5 картера. С сателлитными колесами соединены роторы синхрониьЕх 1 енератора и электродвигателя с катящг-мися роторами,конструктивно совмещенные с гипоциклоидальными механизмами приводов. Обмотка 12 возбуждения синхронного электродвигателя с катящимся ротором гипоциклоидального механизма привода вытеснитепьного поршня 6 под ключается к источнику постоянного тока, а якорная обмотка 13 - jc источ нику переменного тока, которым является синхронный генератор с катящимся ротором, преобразующг-гй механическую энергию рабочего поршня„ На электрических линиях, связьшаю щих якорные обмотки генератора и дви гателя, установлен регулятор 4 сдви га фаз. Датчик 15 для обеспечения высоких. эксплуатационнь8х характеристик (условий смазки5 простоПх обслу яяетанкя,, нзрывоопасности и .) СОЕ местко с синхронным генератором-датчиком с катящимся ротором 18э сое,ци ненным с коленчатым валом 10 и являкп 5 1ДИМСЯ электрическим аналогом меньших. размеров синхронного генератора. Обмотки 12 и 13 синхронного генератора соединены соответствующими обмотками 19 генератора-датчика. В воздушном зазоре генератора-датчика вследствие пропорциональности кинематических соотношений приводов, соединения вала 10 генератора с валом 20 генератора-датчика, параллельного соединения обмоток и незначительной их индуктивности, создается магнитны поток, результирующий вектор которого вращается синхронно и синфазно с результирующим вектором магнитного потока в якоре синхронного генератора. В электромагнитной системе двухзубцового синхронного генератора-дат чика 18 с катящимся ротором, состоящей из статора с двумя зубцами полюсами и цилиндрического ферромагнитного ротора без обмотки, на центр масс ротора действуют электромагнитная Q (i), центробежная силы и сила веса ротора. Вектор электромагнитной силы Q М обуславливает одностороннее притяжение ротора к статору, совпадает по направлению с результирующим векто- ром В индукции магнитного потока в якоре и вращается с угловой скоростью между века центральный угол тором В и вектором, направленным из центра статора (точки Ок в точку касания (точку К), прямо пропорционален углу нагрузки. Поскольку направление отрезка Ок в любой момент времени совпадает с направлением отрезка , т.е. прямой, проходящей через ось вращения кривошипа 20 и ротора 21, то датчик 15 должен быть зафиксирюван относительно оси кривошипа 20 и сориентирован в соответствии с направлением отрезка OifOp, как показало на фиг.2. Поскольку са- „ геллитные колеса 21 генератора-датчика обкатывают ротор по направляющим герметичного корпуса без проскальзывания, то по изменению величины угла У можно осуществлять регулирование мощности силовой установки. Пришдип действия магнитодиодного датчика 15 основан на васьма высокой чувствительности магнитодио,дного эффекта к взаимной ориентации вектора тока i через мапгатодиод и вектора индукции MariffiTHoro потока В Датчик 15 имеет 4 магнитодиода, размещенных в виде моста постоянного тока и сориентированных таким об разом, что при совпадении направления результирующего вектора индукцш магнитного потока В с направлением отрезка , разность падений напр жений в точках 3 и 4 равна нулю и соответствует схеме нуль-индикатора Входное постоянное напряжение прикладывается к точкам 1 и 2. Датчик 15 закреплен на диске из магнито мягкого материала, который зафиксиро ван на кривошипе 20 и вращается вмес те с ним. Сателлитное колесо 21 крепится консольно на кривошипе 20 при помощи подшипника. Возможность регулирования мощности двигателя Стирлинга с помощью изменения угла сдвига фаз ct движения поршней показана на графике, изображенном на фиг. 3 и отражающем влияние 64 на мощность N; , отнесенную к произведению максимального давления цикла на рабочий объем двигателя. Регулирование мощности двигателя Стирлинга при изменении нагрузки на синхронный генератор осуществляется по сигналу изменения угла б , который вырабатывается датчиком 15 в фор ме постоянного электрического тока, который передается через скользящие контакты 16, сравнивается с эталонным значением в преобразователем 17, в качестве которого, например, использовать магнитный усилитель, и подается на регулятор 14 сдвига фаз. Предлагаемый способ позволяет повысить экономичность силовой установ ки путем улучшения согласования фаз движения поршней за счет уменьшения 954 динамической ошибки регулирования и времени переходного процесса при выработке управляющего воздействия по прямому измерению всего одной электромагнитной величины, характеризующей мгновенно изменение нагрузки на генератор и не зависящей от полярного момента инерции системы двигатель - генератор. Формула изобретения Способ работы двигателя Стирлинга путем передачи мощности рабочего поршня через гипоциклоидальный меха1ШЗМ привода на встроенный синхронный генератор с катящимся ротором, передачи энергии генератора частично потребителю и частично синхронному электродвигателю с катящимся ротором, использования работы последнего поршня-вытеснителя, регулирование сдвига фаз движения поршней и при помощи воздействия на фазосдвигающее устройство, установленное в цепи питания электродвигателя, отличающийся тем, что, с целью повьнпения экономичности путем улучшения согласования сдвига фаз движения поршней, регулирование осуществляют путем определения результирующего вектора индукции магнитного потока в якоре синхронного генератора, фиксирования точки касания, катящегося с гипоциклоидальным механизмом, определения угла отклонения вектора индукции от прямой, соединяющей центр статора и точку касания ротора, сравнения измеренного угла с эталоном и передачи полученной разности на фазосдвигающее устройство для воздействия на цепь питания и обеспечения сдвига фаз движения поршней.
19
Iff
Изобретение относится к двигателестроению и может быть использовано при создании двигателей с внешним яодводом тепла. Целью изобретения является повьшение экономичности двигателя путем улучшения согласования сдвига фаз движения поршней. При регулировании мощности силовых установок, использующих двигатели Стирлинга с гипоциклоидальнын механизмом привода и работающих на привод синхронных генераторов с катягщмся ротором, приводится в соответствие мощность двигателя с нагрузкой воздействия на синхронный генератор. Оно осуществляется электрическим фазосдвигающим устройством по сигналу датчика, измеряющего угол между результирующим вектором индукции магнитного потока в якоре синхронного генерато2 ра и направлением из центра статора на точку касания ротора. 3 ил. (Л
| Приспособление для закупоривания бутылок | 1927 |
|
SU10481A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
