00 Од Од
10
i Изобретение относится к измерительной технике, в частности к измерительным головкам для координатно- иэмерительных машин.
Цель изобретения - повьшение точ- i нести и производительности измере- i НИИ за счет компенсации инерционнос- Iти нагрузки, а также за счет обеспечения возможности автоматической замены и поворота измерительного наконечника.
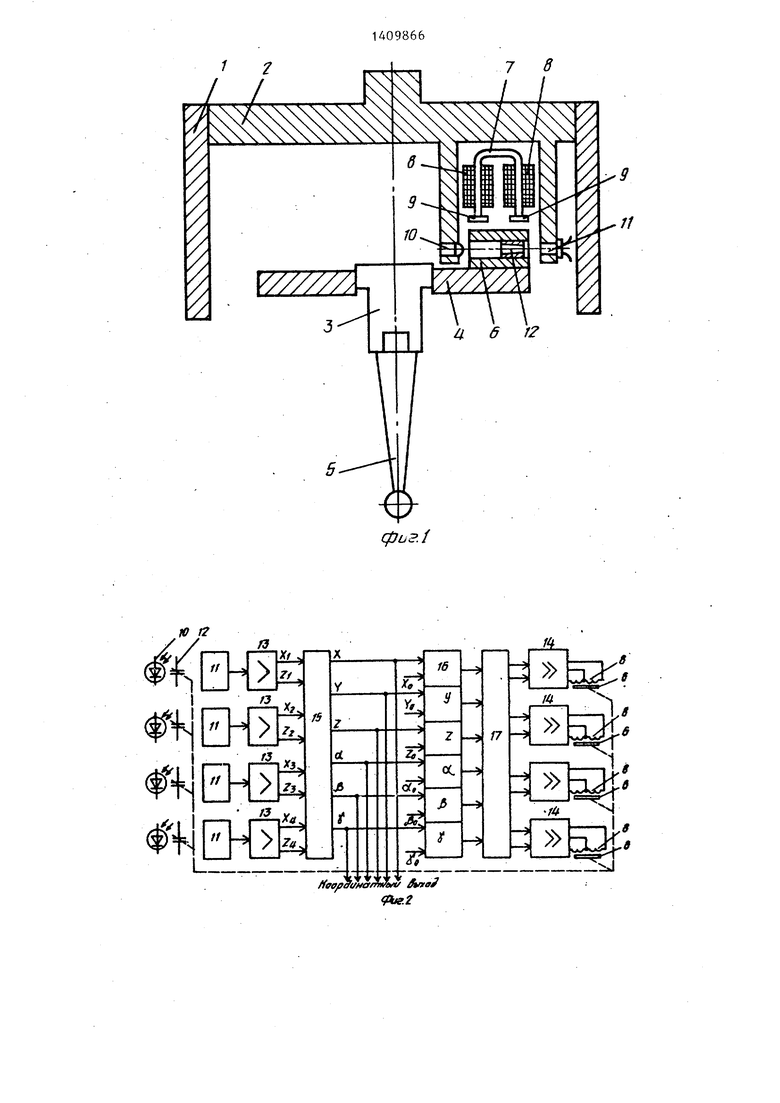
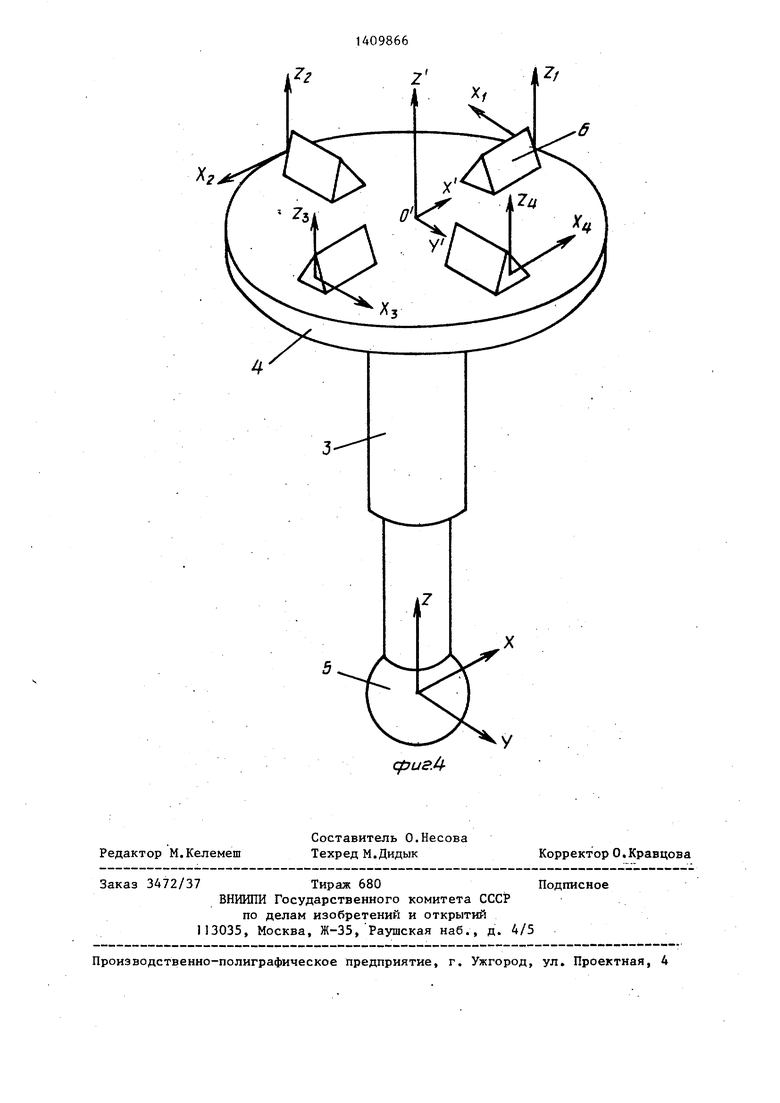
На фиг. 1 представлена конструкция измерительной головки, на фиг. 2 - функциональная схема измерительной головки; на фиг. 3 - конструкция измерительного стержня с измерительным наконечником на одном конце и грибком на другом и компоненты вектора его отклонения с тремя электромагнитными опорами; на фиг. 4 - то же, с четырьмя электромагнитными опорами.
Измерительная головка содержит корпус 1, фланец 2, измерительный стержень 3 с грибком 4 и измерительным наконечником 5, три электромаг- ные опоры, каждая из которых содержит: полый якорь 6, ярмо 7 с обмотками 8 с полюсньми наконечниками 9, светодиод 10, фотодиодную матрицу 11, диафрагму 12, фотоусилитель 13, усилитель 14 мощности, первый блок 16 преобразования координат, шестйкоор- динатную систему 16 автоматического
14098662
Выходы фотоусилителей 13, входящих в каждую электромагнитную опору, подключены к первому блоку 15 преобразования координат, выходы которого подключены к одной группе входов шестикоординатной системы 16 автоматического регулирования, включенной последовательно с вторьм блоком 17 преобразования координат, выходы которого подключены к входам усилите- пей 14 мощности. Вторая группа входов шестикоординатной системы 16 автоматического регулирования является координатными входами измерительной головки.
Измерительная головка на примере одной координаты работает следующим образом.
Положение грибка 4, с которым одним концом жестко связан измерительный стержень 3 с измерительным наконечником 5 на другом конце, стабилизируется относительно фланца 2 при помощи трех электромагнитных опор, которые управляются шестикоординатной системой 16 автоматического регулирования. Сигналы на выходах фотоусилителей 13, пропорциональные
20
25
30
компонентам х , и соответствующего якоря 6 относительно осей фотодиодной матрицы 11 (фиг. 3), поступают на входы .первого блока 15 преобразования координат, который преобразует их в сигналы, пропорциональные кооррегулирования и второй блок 17 преоб- 35 динатам X , Y , Z , d , , изме
разования координат.
К корпусу 1 (фиг. 1) прикреплен фланец 2. Измерительный стержень 3 с грибком 4 на одном конце-и измерительным наконечником 5 на другом ба зируется относительно фланца 2 при помощи трех электромагнитных опор, каждая из которых содержит располо- женный на грибке 4 полый якорь 4 и расположенные на фланце 2 ярмо 7с обмотками 8 и полюсньми наконечниками 9, расположенный по оси якоря 6 двухкоординатный оптронный датчик линейного перемещения в виде устаноленных на фланце 2 светодиода10 и диодной матрицы 11, и закрепленной внутри полого якоря 6 диафрагмы 12, а также показанные на фиг. 2 фотоусилитель 13 и усилитель 14 мощност Входы фотоусилителя 13 подключены к элементам фотодиодной матрицы 11, а выходы усилителя 14 мощности - к обмоткам 8.
компонентам х , и соответствующего якоря 6 относительно осей фотодиодной матрицы 11 (фиг. 3), поступают на входы .первого блока 15 преобразования координат, который преобразует их в сигналы, пропорциональные координатам X , Y , Z , d , , измех
рительного наконечника 5 относительно общего центра электромагнитных опор. Эти сигналы поступают на одну группу входов шестикоординатной системы 16 автоматического регулировани где сравнивается с сигналами, про- порционсшьными заданньм координатам
х
о
, Zg , K; , о 3 YO поступающим на вторую группу ее входов, являющихся координатными входами измерительной головки от внешнего устройства. Три канала этой системы 16 автоматического регулирования регулируют линейные координаты Х , Y , z измерительного наконечника 5 и содержат корректирующие звенья, настройка которых зависит от массы измерительного наконечника 5. Другие три канала регулируют угловые координаты Л , 1 , у измерительного наконечника 5 и содержат корректирующие звенья, настройка которых зависит от соответствующих моментов инерции измери
тельного наконечника 5 относительно осей X , Y , Z , проходящих через центр грибка А, совпадающий с общим центром электромагнитных опор О ,
С выхода системы 16 автоматического регулирования сигналы регулиро- вания Хр, ур, Zp, otj, , р , Ур поступают на вход второго блока 17 преобразования координат, в котором пре- образуются в пары сигналов регулирования Хр. , Zp. для каждой электромагнитной опоры и с его выходов поступают на входы усилителей 14 мощности.
Обмотки 8 преобразуют выходные токи усилителей 14 мощности в магнитные потоки, протекающие в каждой электромагнитной опоре по якорю 6, ярмам 7, полюсным наконечникам 9 с силой, пропорциональной магнитному потоку в этом зазоре. Таким образом, осуществляется регулирование положения якоря 6 по двум координатам в каждой электромагнитной опоре, при этом щестикоординатная система 16 автоматического регулирования, управляющая электромагнитными опорами, однозначно определяет положение грибка 4, а значит, и закрепленного на нем через измерительный стержень 3 измерительного наконечника 5.
При отклонении измерительного наконечника 5 по оси X на величину ОХ происходит смещение грибка 4 относительно О по оси X на величину О х, поворот относительно оси Y на угол ai и соответственно смещение якорей 6 электромагнитных опор относительно осей фотодиодных матриц 11 на величи
ны:
0
-о х о х
0,2, -Z ei
Оз2з
й- гсб
;т- rai
и появление на выходах фотоусилителей 13 сигналов, пропорциональных этим смещениям. Эти сигналы поступают на вход первого блока 15 преобразователя координат, которьй преобразует их в сигналы, пропорциональные смещению центра грибка вдоль оси и его повороту вокруг оси в соответствии с уравнениями:
о х |(03X3-0
(И
Аналогично происходит вычисление сигналов, пропорциональных смещению центра грибка по осям Y и Z и его повороту и у , Эти сигналы являются одновременно выходными сигналами измерительной головки и однозначно определяют компоненты вектора отклонения измерительного наконечника. Например, компонента вектора отклонения измерительного наконечника по оси X равна ОХ О х + г.
Эти сигналы поступают также на одну группу входов шестикоордннатной системы 16 автоматического регулирования, где сравниваются с .заданными
20 координатами х
и (L
о
поступаю5
5
0
0
0
5
щими на.другую группу ее входов, которые в режиме сканирования поступают с ЭВМ, управляющей приводами координатно-измерительной машины и равны нулю в режиме динамических измерений. Сигналы рассогласования dx и AoL усиливаются и подвергаются коррекции, параметры которой зависят соответственно от массы грибка с закрепленными на нем элементами и, его момента инерции относительно оси у .
В режиме сканирования позиционирование измерительного наконечника осуществляется не только приводами координатно-измерительной машины, но и электромагнитными о.порами изме- . рительной головки благодаря наличию у нее координатных входов, при этом необходимая точность позиционирования достигается значительно быстрее, так как приводы координатно-измерительной машины осуществляют грубое позиционирование, а точное - элек с тромагнитные опоры измерительной головки, обладающие значительно боль- щим, чем приводы, быстродействием, что повьшгает производительность изме рений.
Для автоматической замены измерительного наконечника вместе с измерительным стержнем и грибком каждая электромагнитная опора вьшолнена в виде открытой наружу призмы, образованной полюсными наконечниками, и ,соответствующего ей призматического якоря, закрепленного на грибке. При этом электромагнитные опоры выполняют одновременно функцию и электромагнитного замка и при выключении тока в них грибок с измерительным стержнем и измерительным наконечником падает, а при повторном включении тока в электромагнитных опорах фиксируется другой грибок с другими измерительным стержнем и измерительным наконечником.
Для обеспечения одинаковой чувствительности и измерительного усилия по осям X и Y элементы базирования грибка выполнены в виде четырех электромагнитных опор, расположенных под углом 90°, при этом возможна не только автоматическая замена измерительного Наконечника с измерительным стержнем и грибком, но и их поворот на 90 .
Фор м у ла изобретения
1, Измерительная головка, содер-. жащая корпус с фланцем, измерительный стержень с грибком на одном конце и измерительным наконечником на другом, элементы базирования грибка, выполненные в виде трех электромагнитных опор, каждая из которых состоит из расположенного на грибке полого якоря, расположенного на фланце ярма с обмотками и полюсными наконечниками, расположенного по оси полого якоря двухкоординатного оптронного датчика линейного перемещения, выполненного в виде установленных на фланце светодиода и фотодиодной матрицы и закрепленной внутри полого якоря диафрагмы, фотоусилителя и усилителя мощности, первый блок преобразования координат, входы фото- усилителя каждой из трех электро
5
0
5
0
5
0
магнитных опор связаны с соответствующей фотодиодной матрицей, выходы усилителя мощности каждой из трех электромагнитных опор подключены к соответствующим обмотками ярма, входы первого блока преобразования координат связаны с выходами каждого из фотоусилителей, а его выходы являются координатными выходами измерительной головки, отличающая- с я тем, что, с целью повьшгения точности и производительности измерений, она снабжена щестикоординатной системой автоматического регулирования положения грибка и вторым блоком преобразования координат, первый блок преобразования координат выполнен с шестью выходами, соединенными с первой группой входов шестикоординатной системы автоматического регулирования, вторая группа входов которой является координатными входами измерительной головки, выходы шестикоординатной системы автоматического регулирования соединены с входами второго блока преобразования координат, выходы которого подключены соответственно к входам усилителей мощности каждой из трех электромагнитных опор.
2.Измерительная головка по п. 1, отличающаяся тем, что полый якорь имеет форму треугольной призмы, одна из боковых граней которой расположена на грибке, а полюсные на.конечники расположены так, что их плоскости параллельны свободным боковым граням треугольной призмь:.
3.Измерительная головка по п. 1, отличающаяся тем, что элемент базирования грибка снабжен четвертой электромагнитной опорой.
/ /
V/77///:

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительная головка | 1985 |
|
SU1272111A1 |
| СПОСОБ КОНТРОЛЯ ОПТИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ С ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2188389C2 |
| ДАТЧИК ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДЕТАЛИ ОТНОСИТЕЛЬНО СИСТЕМЫ КООРДИНАТ СТАНКА | 2015 |
|
RU2597449C1 |
| Автоматические весы | 1987 |
|
SU1506307A1 |
| Измерительная головка | 1985 |
|
SU1413421A1 |
| СПОСОБ ОПТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2235972C2 |
| Координатная измерительная система для токарно-револьверного станка с ЧПУ | 1985 |
|
SU1303373A1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| Измерительная головка | 1989 |
|
SU1730527A1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |

Изобретение относится к области измерительной техники. Цель изобретения - повьпнение точности и производительности измерений за счет компенсации инерционности нагрузки, а также за счет обеспечения возможности автоматической замены измерительного наконечника. Отклонение измерительного наконечника от номинального положения вызывает смещение якорей злек- тромагнитных опор относительно осей фотодиодньгх матриц и появление на выходах фотоусилителей сигналов, пропорциональных этим смещения. Блок преобразования координат вычисляет компоненты вектора отклонения измерительного наконечника. В системе автоматического регулирования полученные сигналы сравниваются с заданными координатами и корректируются. Сигналы рассогласования усиливаются усилителями и регулируют положение измерительного наконечника путем воздействия на электромагнитные опоры. 2 з.п. ф-лы, 4 ил. (Л
to t2
ГЭ
фиг
«L
(f3ue.3
сриеЛ
| Измерительная головка | 1985 |
|
SU1272111A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
