to to
сд
Изобретение относится к области автоматического управления электроприводами и может быть использовано, в частности, для определения статической нагрузки электродвигателей.
Цель изобретения - расширение функциональных возможностей и повышение надежности определения динамических режимов электродвигателя.
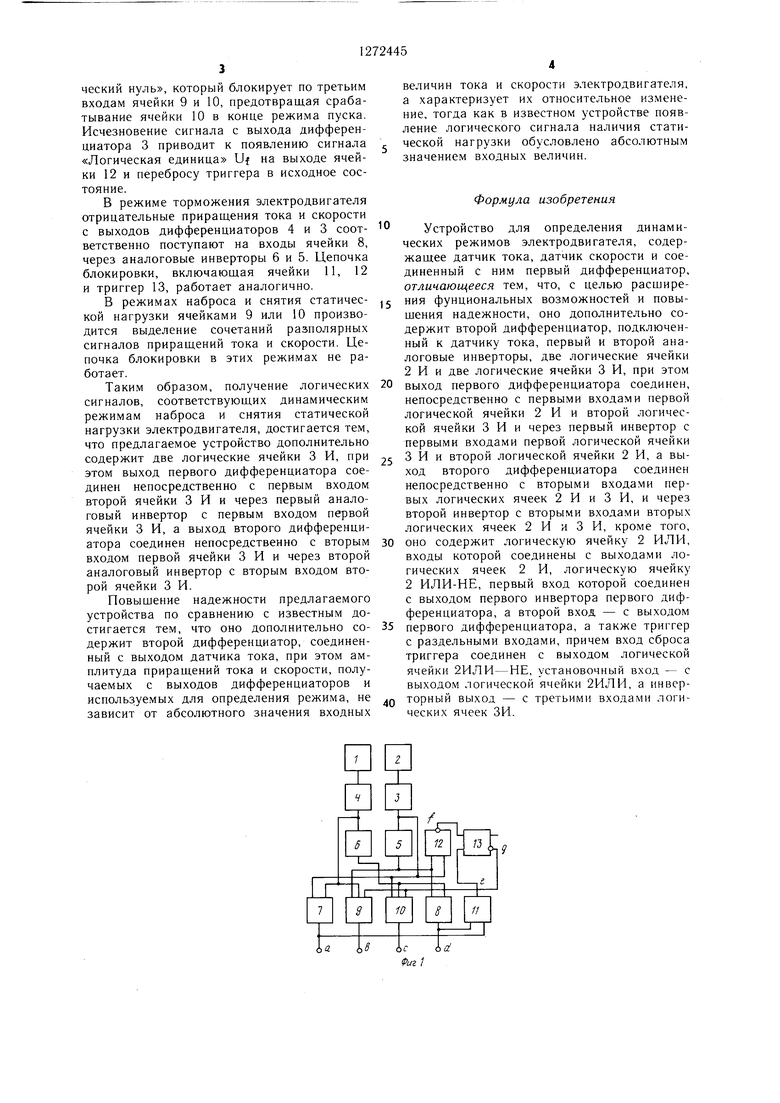
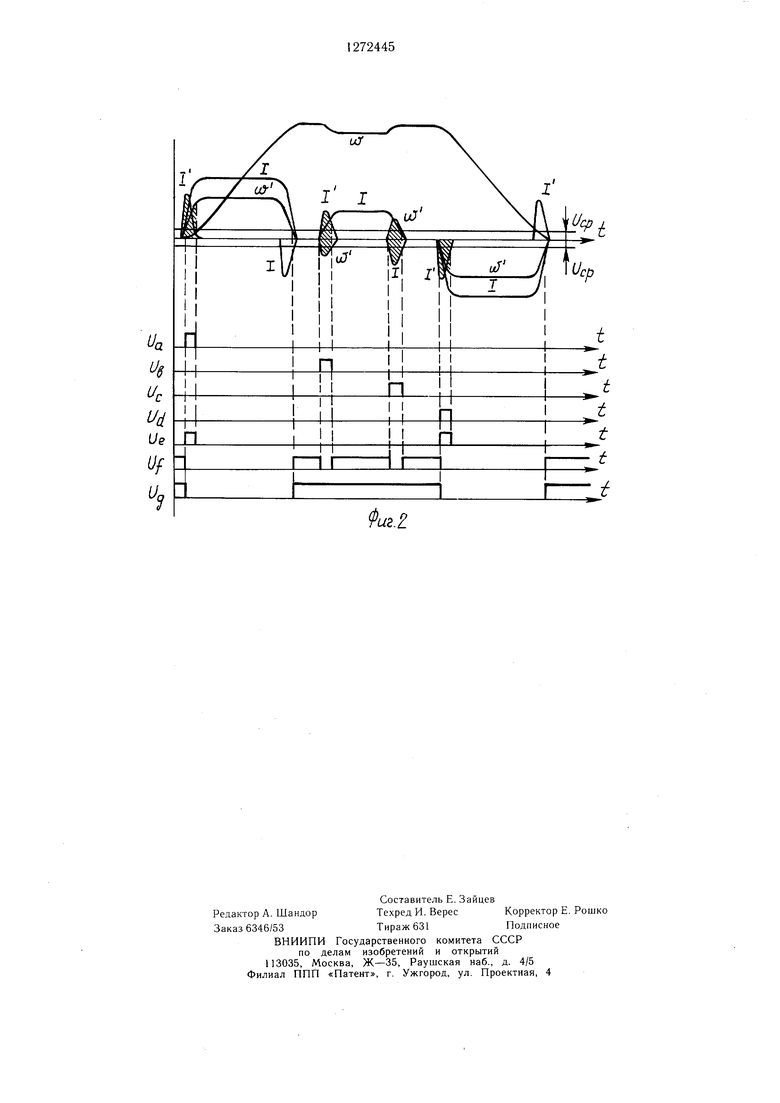
На фиг. 1 приведена блок-схг.ма предлагаемого устройства; на фиг. 2 - временные диаграммы, поясняюш,ие работу устройства.
Устройство для определения динамических режимов электродвигателя содержит датчик 1 тока и датчик 2 скорости, первый дифференциатор 3, соединенный с датчиком 2 скорости, второй дифференциатор 4, соединенный с датчиком 1 тока, первый 5 и второй 6 аналоговые инверторы, первую 7 и вторую 8 логические ячейки 2 И, первую 9 и вторую 10 логические ячейки 3 И. При этом выход дифференциатора 3 соединен непосредственно с первыми входами ячеек 7 и 10 и через инвертор 5 с первыми входами ячеек 9 и 8, а выход дифференциатора 4 соединен непосредственно с первыми входами ячеек 7 и 9, и через инвертор 6 с вторыми входами ячеек 8 и 10. Кроме того, устройство содержит логическую ячейку 2 ИЛИ 11, входы которой соединены с выходами ячеек 7 и 8, логическую ячейку 2 ИЛИ-НЕ 12, входы которой соединены с выходами дифференциатора 3 и инвертора 5, а также триггер 13 с раздельными входами. Причем вход сброса триггера 13 соединен с выходом ячейки 12, установочный вход - с выходом ячейки 11, а инверсный выход триггера 13 соединен с третьими входами ячеек 9 и 10.
Временные диаграммы (фиг. 2) представляют собой фрагменты осциллограмм, полученных при исследовании предлагаемого устройства на моделирующей машине МН-7. На диаграммах обозначены ток 1 электродвигателя (выходной сигнал датчика 1 тока), скорость со электродвигателя (выходной сигнал датчика 2 скорости), приращение со (первая производная) скорости электродвигателя (выходной сигнал дифференциатора 3), приращение I (первая производная) тока электродвигателя (выходной сигнал дифференциатора 4), выходные сигналы Ua-Ud сочетаний приращений тока и скорости соответственно при пуске, набросе статической нагрузки, снятии статической нагрузки., торможении электродвигателя (выходные сигналы ячеек 7-10), выходной сигнал U ячейки 11, выходной сигнал U( ячейки 12, выходной сигнал Ug триггера 13, порог срабатывания UCP ячеек 7-10.
Принцип действия устройства основан на определении приращений тока и скорости электродвигателя и выделении сочетаний этих приращений, соответствующих определенным динамическим режимам электродвигателя.
Устройство работает следующим образом.
Сигнал, пропорциональный току электродвигателя, получают на выходе датчика 1 тока. Сигнал, пропорциональный скорости электродвигателя, получают на выходе датчика 2 скорости и дифференцируют при помощи дифференциатора 3, получая сигнал приращения скорости. Выходной сигнал датчика 1 тока дифференцируют при помощи дифференциатора 4, получая сигнал приращения тока.
Динамические режимы электродвигателя характеризуются следующими соотношениями изменений тока и скорости, т.е. соответствующими знаками приращений (фиг. 2) 0 режим пуска - нарастание тока и скорости, т.е. положительные приращения тока и скорости; режим наброса статической нагрузки - нарастание тока и спадание скорости, т.е. положительное приращение тока и отрицательное приращение скорости; режим снятия статической нагрузки - спадание тока и нарастание скорости, т.е. отрицательное приращение тока и положительное приращение скорости; режим торможения - реверс тока и спадание скорости, т.е. отQ рицательные приращения тока и скорости.
Для приведения приращений к одному знаку используют аналоговые инверторы 5 и 6. Выделение сочетаний приращений тока и скорости осуществляется логически5 ми ячейками 2 И и 3 И 7-10. Логические сигналы, соответствующее определенным динамическим режимам лектродвигателя, снимаются с выходов логических ячеек (а - d). Ячейки 11 и 12, а также триггер
д 13 служат для предотвращения появления ложных сигналов динамических режимов наброса и снятия статической нагрузки при пуске и торможении электродвигателя. Например, при пуске электродвигателя положительное приращение тока с выхода
5 дифференциатора 4 поступает непосредственно на второй вход ячейки 7. Кроме того, положительное приращение скорости с выхода дифференциатора 3 поступает на первый вход ячейки 7. Превышение сигналами, поступающими на входы ячейки 7,
° уровня срабатывания Uop, вызывает появление на ее выходе а логического сигнала Ua, соответствующего динамическому режиму пуска электродвигателя. Этот сигнал поступает также на вход ячейки 11, вызы5 вая появление на ее выходе сигнала «Логическая единица Ug, что в свою очередь приводит к переключению триггера 13 и появлению на его выходе § сигнала «Логический нуль, который блокирует по третьим входам ячейки 9 и 10, предотвращая срабатывание ячейки 10 в конце режима пуска. Исчезновение сигнала с выхода дифференциатора 3 приводит к появлению сигнала «Логическая единица Uf на выходе ячейки 12 и перебросу триггера в исходное состояние.
В режиме торможения электродвигателя отрицательные приращения тока и скорости с выходов дифференциаторов 4 и 3 соответственно поступают на входы ячейки 8, через аналоговые инверторы 6 и 5. Цепочка блокировки, включающая ячейки 11, 12 и триггер 13, работает аналогично.
В режимах наброса и снятия статической нагрузки ячейками 9 или 10 производится выделение сочетаний разполярных сигналов приращений тока и скорости. Цепочка блокировки в этих режимах не работает.
Таким образом, получение логических сигналов, соответствующих динамическим режимам наброса и снятия статической нагрузки электродвигателя, достигается тем, что предлагаемое устройство дополнительно содержит две логические ячейки 3 И, при этом выход первого дифференциатора соединен непосредственно с первым входом второй ячейки 3 И и через первый аналоговый инвертор с первым входом первой ячейки 3 И, а выход второго дифференциатора соединен непосредственно с вторым входом первой ячейки 3 И и через второй аналоговый инвертор с вторым входом второй ячейки 3 И.
Повышение надежности предлагаемого устройства по сравнению с известным достигается тем, что оно дополнительно содержит второй дифференциатор, соединенный с выходом датчика тока, при этом амплитуда приращений тока и скорости, получаемых с выходов дифференциаторов и использ1уемых для определения режима, не зависит от абсолютного значения входных
величин тока и скорости электродвигателя, а характеризует их относительное изменение, тогда как в известном устройстве появление логического сигнала наличия статической нагрузки обусловлено абсолютным значением входных величин.
Формула изобретения
Устройство для определения динамических режимов электродвигателя, содержащее датчик тока, датчик скорости и соединенный с ним первый дифференциатор, отличающееся тем, что, с целью расширения фунциональных возможностей и повыщения надежности, оно дополнительно содержит второй дифференциатор, подключенный к датчику тока, первый и второй аналоговые инверторы, две логические ячейки 2 И и две логические ячейки 3 И, при этом
выход первого дифференциатора соединен, непосредственно с первыми входами первой логической ячейки 2 И и второй логической ячейки 3 И и через первый инвертор с первыми входами первой логической ячейки
3 И и второй логической ячейки 2 И, а выход второго дифференциатора соединен непосредственно с вторыми входами первых логических ячеек 2 И и 3 И, и через второй инвертор с вторыми входами вторых логических ячеек 2 И и 3 И, кроме того,
оно содержит логическую ячейку 2 ИЛИ, входы которой соединены с выходами логических ячеек 2 И, логическую ячейку 2 ИЛИ-НЕ, первый вход которой соединен с выходом первого инвертора первого дифференциатора, а второй вход - с выходом
первого дифференциатора, а также триггер с раздельными входами, причем вход сброса триггера соединен с выходом логической ячейки 2ИЛИ-НЕ, установочный вход - с выходом логической ячейки 2ИЛИ, а инверторный выход - с третьими входами логических ячеек ЗИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения динамических режимов электродвигателя | 1987 |
|
SU1474820A2 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1309247A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2024 |
|
RU2822126C1 |
| СПОСОБ АДАПТИВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА | 2018 |
|
RU2714022C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С УПРАВЛЯЕМОЙ ДВУНАПРАВЛЕННОЙ ВНЕШНЕЙ ФОРСИРОВКОЙ | 2021 |
|
RU2781107C1 |
| Многоканальный фотометр | 1988 |
|
SU1569584A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ВНЕШНЕЙ ДВУНАПРАВЛЕННОЙ ФОРСИРОВКОЙ | 2019 |
|
RU2725137C1 |
Изобретение относится к системам управления электроприводами. Цель изобретения - расширение функциональных возможностей и повышение надежности устройства. Устройство содержит датчик тока и датчик скорости, связанные через дифференциаторы и аналоговые инверторы с логическими ячейками 2И, ЗИ, 2ИЛИ, 2ИЛИ- НЕ и триггером. Определяемые в схеме приращения тока и скорости электродвигателя с помощью указанных логических ячеек выделяются в определенные сочетания, соответствующие определенным динамическим режимам электродвигателя. 2 ил.
| Устройство для измерения статического момента двигателя постоянного тока | 1981 |
|
SU958990A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для определения статической составляющей тока двигателя | 1980 |
|
SU902186A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
