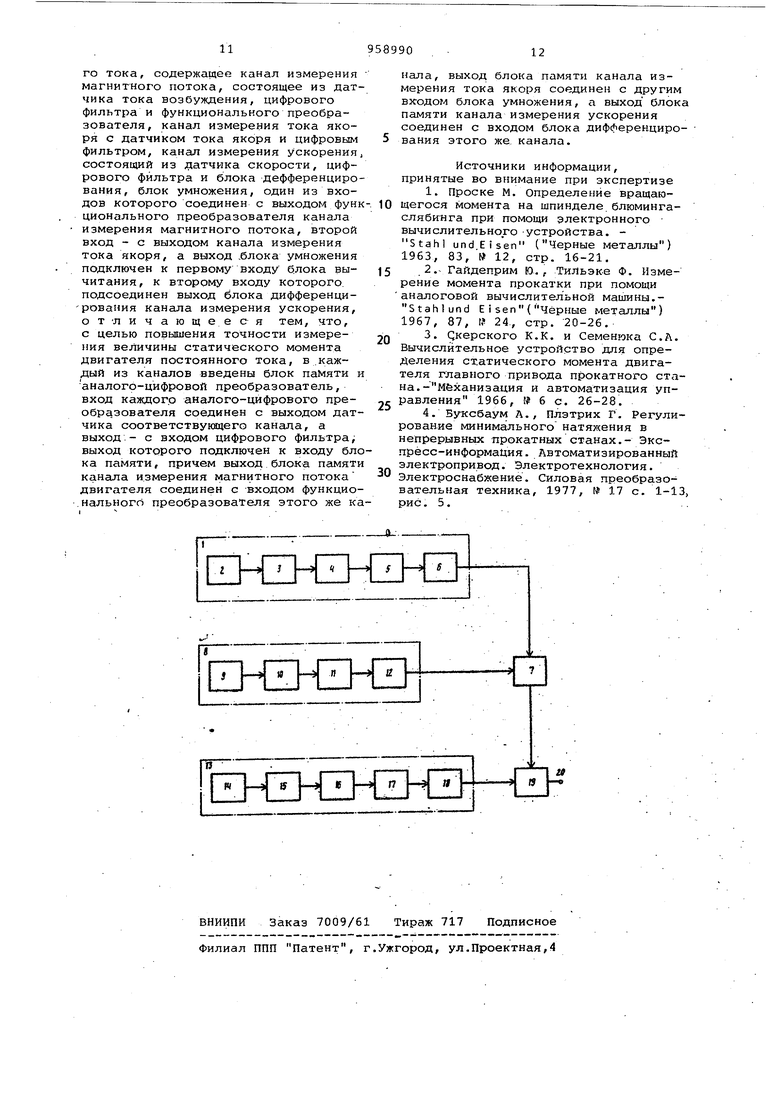
сигнала .алт Фильтруются с помощью фильтров, выполненных на операционных усилителях и подаются на. входы вычислительного устройства. С помощью потенциометров в вычислительное устройство вводятся конструктивная постоянная двигателя;и величины моментов инерции механизмов стана и двигателя, приведенные к валу двига |теля, а также масштабные коэффициен ты Cl.. - Недостатками этого устройства яв ляются низкая точность измерения ст тического момента, а также сложност монтажа и эксплуатации вследствие Наличия в устройстве датчиков Холла Напряжение,, снимаемое с датчиков Холла зависит от температуры окружающей среды. При работе двигателя температура в воздушном зазоре може меняться в значительных пределах, особенно при .неравномерной частоте включения-выключения, характерной для работы прокатного двигателя, и это приводит к погрешности в опреде лении величины пожжа, а следовател но, и значения статического момента Измерение потока с помощью датчиков Холла требует сложной и длительной тарировки канала измерения , так как невозможно заранее рассчитывать место в воздушном зазо ре двигателя, в котором напряжение Холла пропорционально потоку и не зависит от полей рассеивания и от р личных местных насыщений долюсного железа. Установка датчиков Холла на двигатели, находящиеся в эксплуа ..таЦйй, связана с остановом двигате ля и его полной разборкой. . Указанные недостатки частично устраняются в другом известном устройстве . В этом устройстве значение статического момента двигателя вычисляет ся по соотношению (2), Измерение TOK якоря и вычисление ускорения производится аналогично описанному. Для вычисления величины магнитного поток на главном полюсе двигателя укладывается измерительная обмотка. Величина потока вычисляется интегрирова нием сигнала измерительной обмотк.и на некотором интервале времени 2. Однако у известного устройства б. недостаточная точность измерения ста тического момента вследствие накопления систематической ошибки при 1 нтегрировании, ограниченная область применения из-за ограничения допустимого времени работы двигателя в режиме .с ослаблением поля, усложнение конструкции устройства за счет введения дополнительного устройства для компенсации медленных изменений потока Наличие помех в цепях измерения потока, неизбежных при работе мощных двигателей, а также, дрейф нулей усилителей приводят к накоплению систематической ошибки., причем эта ошибка пропорциональна длительности интервала интегрирования. При коротких интервалах интегрирования не успевает сглаживаться случайная составляющая сигнала и в вычисленном значении момента увеличивается случайная ошибка, В измерительной обмотке индуцируется напряжение, процорциональное изменению потока, а не его величине. Величина потока вычисляется интегрированием этого напряжения, медленные изменения потока, вызванные медленными изменениями тока, возбуждения, . . обусловленными.изменением температуры, дрейфом тиристорных преобразователей, и т.д., интегратором не учитываются. Для учета этих изменений необходим дополнительный блок, корректирующий вычисленное значение потока. Описываемый блок рабо.тоспособен в условиях, когда длительность работы двигателя с ослаблением потока не больше длительности интервала интегрирования (обычно длительность интервала интегрирования устанавливается не более единиц секунд во избежание накопления систематической ошибки). Это условие выполняется лишь в некоторых частных случаях. На сортовых и тонколистовых станах режим работы двигателя с ослаблением потока составляет Десятки секунд. Значение момента в рассматриваемом устройст.ве получается с задержкой 0,3-0,5 с что часто не допустиг ю (например в задачах синхронизации скоростей главных приводов при совместной прокатке в Нескольких клетях, анализе переходных процессов и т.д.) Известно устройство, в котором значение статического момента вычисляется по соотношению (1). Каналы измерения тока якоря и ускорения выполнены аналогично описанным устройствам. Канал измерения потока состоит из датчика напряжения на якоре, и усилителя, вычисляющего разность .и5(-351 RS. Величина потока .вычисляется по величинам сигналов датчика тока якоря,датчика скорости, и напряжения на якоре. Фильтрация сигналов производится с помощью фильтров, установленных в каналах измерения каждого сигнала. Вычисление потока осуществляется с помощью аналогового вычислительного устройства по соотношению Ф К, ЦаЛ2 а Величина статического момента вычисляется С .помощью вычислительного устройства, включающего блоки умножения-деления и операционный усилитель.. Величиной L;|d3 /dt пренебрега ют, значение К вводится в аналогов вычислительное устройство с помощью лотенциометра при егр наладке Сз. На малых скоростях работьг двигателя значение знаменателя выражения . (.3) более чем на порядок меньше остальных членов выражения, что. при водит к большим вычислительным погрешностям. При погрешности вычисле-г НИИ ±3,5% и скорости, составляюи(ей 10% от номинальной, погрешность в ; величине момента может достигать 20-33%. Наличие шу ловых составляю1чи ВО входных сигналах приводит.к допо нительным погрешностям. Кроме того, недостатком STorcj ус ройства (при измерении скорости дви гателя наиболее распространенным средством измерения - тахогенераторОм) является,низкая точность измерения статического момента из-за особенностей работы тахогенератора на малых скоростях. На малой;скорос ти точность соответствия величины сигналадатчика скорости (тахогенератора) истинному значению скорости ниже, чем при скоростях, близких к номинальной, кроме того на малых . скоростях характеристика техогенера тора существенно нелинейна. В режиме работы двигателя с ча.стым реверсйрованием, характерном для обиимных и балочных станов, для работы .двигателя с малыми скоростями составляет значительную часть общего времени работы. : . Наиболее близким к предлагаемому является устройство для измерения статического момента двигателя постоянного тока, соде)жащее канал измерения магнитного потока, состоящий из датчика тока возбуждения, цифрового фильтра и.функционального преобразователя, канала измерения тока якоря с датчиком тока якоря и цифровым Фильтром, канал измерения ускорения, СОСТОЯЩИЙ из Датчика скорости, цифрового фильтра и блока дифференцирования, блок умножения, один из входов которого соединен с выходом функционального преобразова теля канала измерения магнитного , noTOfta, второй вход - с выходом каНс1ла измерения тока якоря,, а выход блока умножения подключен к первому входу блока .вычитания, к второму входу которого подключен выход блок дифференцирования канала измерения ускорения. Сигналы с датчиков тока возбужДе .йия и тока якоря каналов измерения магнитного потока двигателя и измерения тока якоря, усиленные по мощности соответствуюи ми усилителями, фильтруются фильтрами второго поряд .ка. В зависимости от значения сигна ла тока возбуждения, поданного на вход функционального преобразрвателя, с его выхода на вход блока умноже ния поступает сигнал, пропорциональный магнитному потоку двигателя, приходящемуся на один полюс двипателя. -. . . Сигнал датчика тока якоря.также усиливается по мощности и фильтруется, причем регулировкой величины коэффициента усиления усилителя учитывается влияние значения конструктивной постоянной двигатели на величину измеряемого момента. Сигналы с выходов каналов измерения магнитного, потока двигателя и тока якоря подаются на входы блъка умножения, регшизующего вычисления по первой части выражения (2), абеспечивая тем самым получение на выходе блока сигнала, пропорционального полному моменту двигателя. В йанале измерения ускорения сигнал .датчика скорости дифференцируется блоком дифференцирования для получения значения ускорения. Значение момента инерции вводится регулировкой ко.эффициента передачи блока Дифференцирования. Таким образом на выходе блока дифференцирования, служащим выходом : аи ала измерения ускорения, получается значение динамического момента двигателя.-Блок вычитания завершает вычисление статического момента двигателя, вычитая из значения полного момента двигателя, поступающего с выхода блока умножения, величину динамического момента , поступающего с выхода блока дифференцирования . Значение статического момента даннымустройством определяется более точно, чем описанными выше аналогичными., поскольку в вычислениях не участвуют значения скорости, приводящей к вычислительный погрешностям на малых значениях ско-. рости. Кроме того, магнитный поток двига Теля вычисляется по току возбуждения., что устраняет необходимость в дополнительных датчиках потока (датчиков Холла, измерительных обмотках) , Вносящих дополнительные .ошибки L4 .. Недостатком указанного устройства является пониженная точность измерения величины статического момента изза неодинаковых фазовых сдвигов в .сигналах, подаваемых на входы блоков ;, умножения и вычитания. Неодинаковые фазовые сдвиги сигналов обусловлены различными постоянными времени каналов измерения. Например, если датчики токов якоря и возбуждения можно считать практически, бёзинерционными устройствами, то датчик скорости.(обычно тахогенератор) в канале измерения ускорения имеет постоянную времени в несколько миллисекунд, и это уже определяет сдвиг фаз сигналов. Фильтры, включе ные в каналы измерения, также внося р&эличие в величину фазовых сдвиго вследствие различия их частотных характеристик. Обычные фильтры низкой частоты (без эопеминдющего устройства) позволяют Регулировать заде:ржку с |гнал но при этом меняются и характеристи ки фильтра (крэффициент передачи, .чаатотн 0й характеристики и т. поэтому при наличии трех из мерения, получаю11(их информацию от независимых (к различных по своим свЬйствам) датчиков, практически нево зможно настроить фильтры так чтобы они обладали требуемыми харак теристиками, бпроде ляемыми свойства ми сигналов, и помех и одинаковыми временами задержек. ; -- , ,, /. . . . -.-У.. . Таким обргзом, на входы блока умножения и блока вычитания, вычисляющих значения статического момента , поступают, сигйалы, значения .которых соответствуют различным , что искажает величину вычисленного значё,НИя момен та двигателя. Кроме того., возможно различие сдвигов фаз в сигналах. поступйющих на блоки умножения и вычи ания с выходов указанных каналов вследствие сдвигов Фг13 прису(дих входной информации для каадого канала, ПОСКОЛЬКУ переходные процессы в системе управления двигателем различны в разных схемах управления и Дают различные j трудно учитыва мые сдвиги фаз в каждом канале. Например, при пита19ии якорной цепи двигателя от.генератора, а о 5мотки возбужцения от тиристорного преобразова еля. Особенно сказывается влияние фазовых сДвиров на измеренное значение статичес1 ого момента в режимах разгона и торможения двигателя, последнее обстоятельство делает невозможным применение указанного устройства, например, для задач . синхронизации двигателей главных Привсэдов клетей при совместной прокатке легких профилей в режимах разгона и торможения. Меаду тем на реверсивных станах (например универсальных бсшочных) прокатка в режи мах разгона-торможения может составлять значительную часть цикла (до 70% на коротких балках). По тем же причинам рассматриваемое устройство совершенно непригодно для задач исследования переходных процессов на стане, весьма важных для индентификации объектов управления. Цель изобретения - повышение точности измерения величины статического момента .двигателя постоянного тока за счет более точного его определения во время переходных процессов Поставленная Цель достигается тем, что в каждый из каналов .введены блок памяти .и аналого-цифровой преобразователь, вход каждого аналого-цифрового преобразователя соединен с выходом датчика соответству1эщего канала, а выход - с входом цифрового фильтра, выход которого подключен к входу блока памяти, причем выход блока памяти канала измерения магнитного потока .двигателя соединен с входом функционального преобразователя этого же канала, выход блбксэ памяти канала Изме рения tOKa якЬря роединен с вторым входом умножения/ а выход блока памя ти каисша измерения ускорения соедИг нен с входом блока дифференцирования этого же канала. На, чертеже приведена блок-схема предлагаемого, устройства. . Устройство содержит канал измерения пртока 1, включающий последовательно сое цинецные -Датчик тока возбуждения 2, аналого-цифровой преобразователь 3, цифровой фильтр 4, блок памяти 5 и функциональный преобразователь б, выход функционального : преобрг1э6вателя б соединен с входом бЛока умножения 7; канала измерения тока якоря 8, включающий последовательно соединенные датчик тока, якоря 9, аналого-цифровой преобразователь 10, :цифровой фильтр 11, блок памяти 12 f выход блока памяти 12 соединен с. другим входом блока умноже- . ния. 7, Канал измерения ускорения 13, включающий последовательно соединенные датчик скорости 14, аналого-цифт ровой преобразователь 15, цифровой фильтр 16, блок памяти 17, .блок диф-: ференциро.вания 18, выход блока дифт ференцирования 18 соединен с входом блока вычитания 19; блок умножения7, входы которого соединены с выходами функционального преобразователя б и блока памяти 12, а выход с другим входом вычитания; блбк вычитания 19, входы которого соединены С выходом блока умножения 7 и блока дифференцирования 18, а выход с вы- ходной шиной 20., к которой могут быть подсоединены блок индикации, или устройство управлением двИгателем соответствующего Механизма (на чертеже не показаны). .Сигналы, пропорциональные току возбуладения и току якоря, снимаются с датчика тока возбуждения 2 и тока якоря 9 соответственно, сигна.лы уси Ливаптся, гальваииче.ски развязываются и г реобразу1отся в цифровую форму аналого-ци 1 овь1ми преобразователями ,3 и 10. .сигнал. Пропорциональный скорости, снимаемый с датчика скорости 14 подается на аналогоцифровой преобразователь 15. Сигналы всех трех каналов фильтруются цифровыми фильтрами 4, 11 и 16, соединенными с блоками памяти 5, 12 и 17, Цифровые фильтры 4, 11 и 16 каждого канала обрабатывают.сигналы в соответствие с их спектром и характерис тиками поь.ех, индивидуальных для ка дого канала. Выходные сигналы фильт ров 4, 11 и 16 в цифровом виде запо минаются в блоках памяти 5, 12 и 17 на протяжении интервала времени, оп ределяемого максимально возможным фазовым сдвигог в каналах. Этот йнтервал определяется при наладке при бора на конкретном объекте. По а дполнению блока памяти 5, 12 и 17 с поступлением каждого следующего отсчета с фильтра 4, 11 и 16, запомне ная информация сдвигается на одно сл во таким образом, что первое в бло ке памяти 5, 12 и 17 слово выталкивается из памяти, а последняя ячейка освобождается для вновь поступив шей информации. Отфильтрованный и задержанный сигнал, пропорциональный току возбуждения, преобразуется функциональ ным преобразователем 6 в сигнал, пропдрциональный магнитному потоку Ф приходящемуся на один полюс. Блок умножения реализует вычисление, по ,первой части выражения (1) К2Ф.|,т.е значение полного момента. Значение конструктивной постоянной двигателя вводится регули эованием коэффициента передачи цифрового фильтра 11. Отфильтрованный сигнал скорости поступает на вход блока диф ференцирования 18, где вьлчисляется dn производная скорости т-г , при этом коэффициент передачи блока дифференцирования 18 выбирается пропорционал ным моменту инерции 3 таким образом на выходе блока дифференцирования 18 получается сигнал, пропорциональный динамическому моменту . Блоком вычитания 19 -завершается вычисление статического момента путем вычитания динамического момента из полного момента двигателя. Таким образом, предлагаемая схема построения каналов устройства поз воляет свести разность в фазовых сдвигах сигналов до величины одного рабочего такта входяаих- в устройство цифровых блоков. Современные , цифровые элементы позволяют сделать величину такта пренебрежимо малой по сравнению с допустимой .величиной фазового сдвига. .Так серийно выпускаемые интегральные схемы позволяют работать при длительности такта в. единице микросекунд, т.огда как допустимые значения фазовых сдвигов 100-150 МКС, так как для рассматриваемых двигателей большой мощности сигналы, участвующие в вычислении значения статического момента двигателя изменяются за указанное время на величины, составляющие не более 1% от их номинальных значений. Следовательно и значение статического момента,вычисленное по выраженцю (2) с использованием величин, отличающихся от их значений не более 1%, отличается от своего . истинного значения не более чем на 2%. Экономический эффект.от применения предлагаемого устройства достигается за счет повышения, качества проката вследствие возможности синхронизации скоростей валков в режиме разгона и торможения, при йспользо вании устройства в системах синхронизации скоростей за счет предотвращения аварийных ситуаций во время захвата металла валками, а также за счет совершенствования программ прокатки, проводимого по идентифицированному с помотйю устройства закону распределения нагрузок на оборудование. Введение в устройство аналогоцифровых преобразователей (АДП), входы которых соединены с выходги/и датчиков соответствующих каналов .при выполнении фильтров цифровыми, причем входы цифровых фильтров.связаны с выходами АЦП, позволяет на выходе фильтра каждого канала, в отличие от прототипа, получать значения величин в цифровом виде. Введение блоков памяти в. каждый канал, входы которых соответственно соединены с выходами цифровых фильтров, позволяет полученную и.нфорМацию хранить в каждом блоке памяти в течение интервала, необходимого для синхронизации сигналов во всех трех каналах, причем этот интервал должет быть не меньшим минимальной разности фаз сигналов в любых каналах. Настройка блоков памяти на индивидуальную задержку сигнала в каждом канале -предполагается ручная, по результатам исследования конкретных условий работы, двигателя. .Таким образом, выходные сигналы блоков памя-ти в кангше исклю- . чают фазовые сдвиги, независимо от причины их вйзникновения и возможности их предварительной оценки. Выравнивание фаз сигналов во всех каналах измерения при последующем умножений и вычитании значений сигнаЛО.В позволяет получить на выходе устройства значение величины статического момента двигателя, не искаженное описанными погрешностям. и, поэтому более точные, чем при измерении посредством устройства по прототипу. Формула изобретения Устройетво для измерения статиеского момента двигателя постоянного тока, содержащее канал измерения магнитного потока, состоящее из датчика тока возбуждения, цифрового фильтра и функционального преобразователя, канал измерения тока якоря с датчиком тока якоря и цифровым фильтром, канал измерения ускорения, состоящий из датчика скорости, цифрового фильтра и блока дефференцирования, блок умножения, один из входов которого соединен с выходом функционального преобразователя канала измерения магнитного потока, второй вход - с выходом канала измерения тока якоря, а выход .блока умножения подключен к первому входу блока вычитания, к второму входу которого. подссЭединен выход блока дифференцирования канала измерения ускорения, отличающееся тем, что, с целью повьашення точности измерения величины статического момента двигателя постоянного тока, в .каждый из каналов введены блок памяти и аналого-цифровой преобразователь, вход каждогр аналого-цифрового преобразователя соединен с выходом датчика соответствуквдего канала, а выход - с входом цифрового фильтра; выход которого подключен к входу блока памяти, причем выход блока пг1Мяти канала измерения магнитного потока двигателя соединен с входом функцио.нального преобразователя этого же канала, выход блока памяти канала измерения тока якоря соединен с другим входом блока умножения, а выход блока памяти канала измерения ускорения соединен с входом блока дифференцирования этого же канала.
Источники информации, принятые во внимание при экспертизе
1. Проске М. Определение вращающегося момента на шпинделе блюмингаслябинга при помощи электронного вычислительного -устройства. Stahl undEisen (Черные металлы) 1963, 83, № 12, стр. 16-21,
2.- Гайдеприм Ю. , ТиЛьэке Ф. Измерение момента прокатки при помощи аналоговой вычислительной машины. Stahlund Еisen(Чёрные металлы) 1967, 87, № 24, стр. 20-26.
3.QKepcKoro К.К. и Семенюка С.А. Вычислительное устройство для определения статического момента двигателя главного привода прокатного стана. - Механизация и автоматизация уп5 равления 1966, № 6 с. 26-28.
4.Буксбаум Л., Плэтрих Г. Регулирование минимального натяжения в непрерывных прокатных станах.- Экспресс-информация. Автоматизированный электропривод. Электротехнология. Электроснабжение. Силовая преобразовательная техника, 1977, № 17 с. 1-13, рис. 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода | 1989 |
|
SU1644345A1 |
| Способ автоматической настройки контура регулирования тока якорной цепи тиристорного электропривода постоянного тока | 1984 |
|
SU1277333A1 |
| Устройство для регулирования скорости электродвигателя | 1980 |
|
SU964936A1 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399881A1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ПЕРЕХОДНЫХ РЕЖИМОВ В ЭЛЕКТРИЧЕСКОЙ СИСТЕМЕ | 2014 |
|
RU2554513C1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Способ регулирования скорости электродвигателя постоянного тока | 1986 |
|
SU1399875A1 |
