1
(21)1Й93155/31-08
(22)10.08.88
) 07.07.90. Бюл. № 25
(71)Воронежский политехнический институт
(72)А.М.Литвиненко (53) 621.229.7(088.8)
(56)Механизация и автоматизация производства. 1985, №11, с. 19. ( ПРИВОД РОБОТА-МАНИПУЛЯТОРА
(57)Изобретение относится к робото- техническим системам, а точнее к при1 водам роботов с внешними магнитными системами. Целью изобретения является упрощение конструкции за счет упрощения привода тормоза. При приходе модуля в точку позиционирования якорь 15 помещается в зазоре между полюсами 18 основной магнитной системы.
При этом лобовые части 17 обмотки якоря располагаются между полюсами дополнительной магнитной системы, полюса которой расположены перпендикулярно -полюсам основной магнитной системы. При протекании тока в обмотке якоря происходит электромагнитное взаимодействие между лобовыми частями обмотки и магнитным полем дополнительной магнитной системы, в результате чего возникает сила, действующая на якорь в осевом направлении. приводит к перемещению якоря в этом направлении, а вместе с ним и фрикционного элемента 9 тормоза, растормаживающего якорь 15- При отклю- о чении обмотки якоря происходит его S затормаживание под действием пружин 12. 3 ил.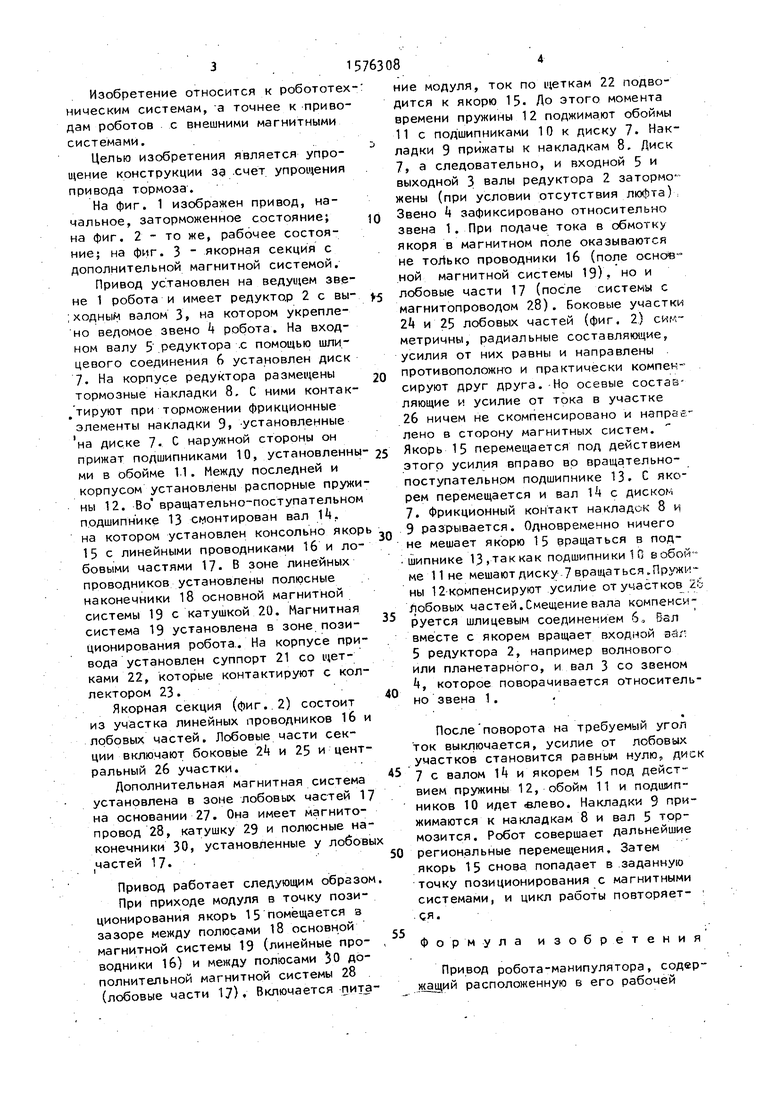
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СТИРАЛЬНОЙ МАШИНЫ | 1993 |
|
RU2051250C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2009 |
|
RU2428782C2 |
| Привод манипулятора | 1986 |
|
SU1397279A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 1968 |
|
SU221804A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2010 |
|
RU2505912C2 |
| ПРИВОД РОБОТА | 2003 |
|
RU2248269C1 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| Самотормозящийся электродвигатель | 1982 |
|
SU1030919A1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
Изобретение относится к робототехническим системам, а точнее к приводам роботов с внешними магнитными системами. Целью изобретения является упрощение конструкции за счет упрощения привода тормоза. При приходе модуля в точку позиционирования якорь 15 помещается в зазоре между полюсами 18 основной магнитной системы. При этом лобовые части 17 обмотки якоря располагаются между полюсами дополнительной магнитной системы, полюса которой расположены перпендикулярно полюсам основной магнитной системы. При протекании тока в обмотке якоря происходит электромагнитное взаимодействие между лобовыми частями обмотки и магнитным полем дополнительной магнитной системы, в результате чего возникает сила, действующая на якорь в осевом направлении. Это приводит к перемещению якоря в этом направлении, а вместе с ним и фрикционного элемента 9 тормоза, растормаживающего якорь 15. При отключении обмотки якоря происходит его затормаживание под действием пружин 12. 3 ил.
6
5
789 10 11 12
-Lt-nn
Ј-jL 15
1
16 17 / /
/
18
№
СП vl
OS
О
оо
18
28 27 29
Фиг.1
31576308
зобретение относится к робототехнд в 1 л 7 в ж З з я н н м 2 м у п с л э п
ическим системам, а точнее к привоам роботов с внешними магнитными истемами.
Целью изобретения является упроение конструкции за счет упрощения ривода тормоза.
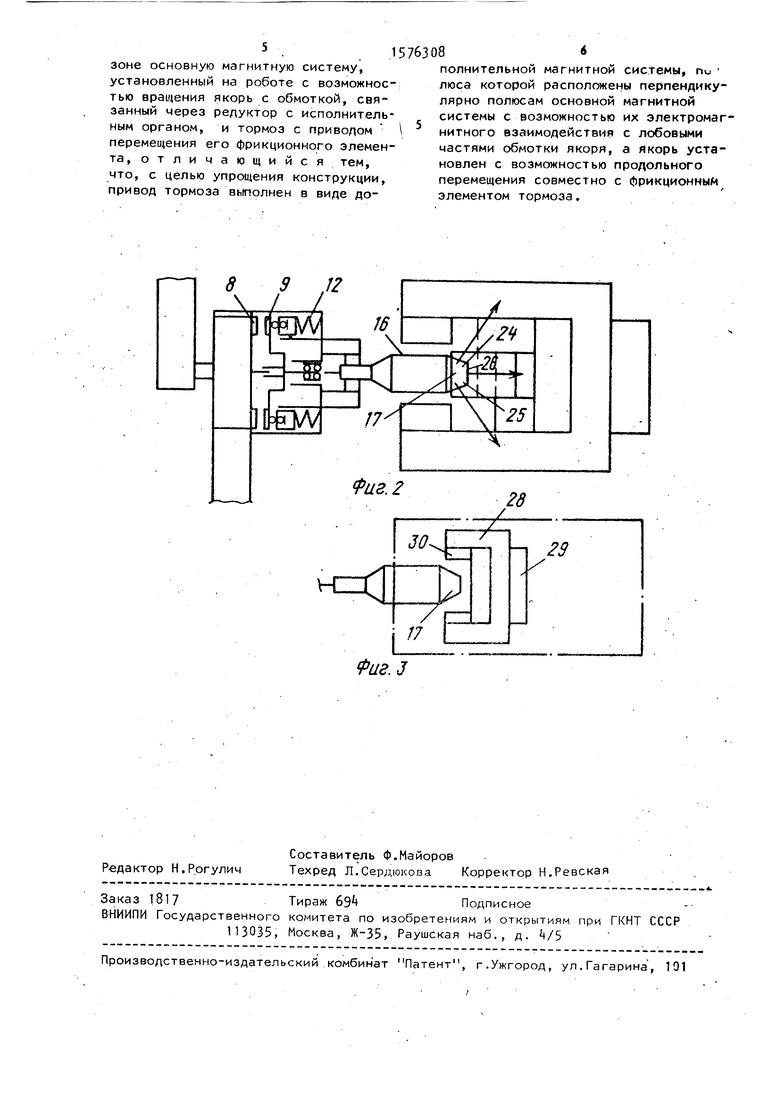
На фиг. 1 изображен привод, наальное, заторможенное состояние; Q на фиг. 2 - то же, рабочее состояние; на фиг. 3 - якорная секция с дополнительной магнитной системой.
Привод установлен на ведущем звене 1 робота и имеет редуктор 2 с вы- ходным валом 3, на котором укреплено ведомое звено k робота. На входном валу 5 редуктора с помощью шли- цевого соединения 6 установлен диск 7. На корпусе редуктора размещены 20 тормозные накладки 8. С ними контак- тируют при торможении фрикционные элементы накладки 9, установленные на диске 7- С наружной стороны он прижат подшипниками 10, установленны- 25 ми в обойме 11. Между последней и корпусом установлены распорные пружины 12. Во вращательно-поступательном подшипнике 13 смонтирован вал 1. на котором установлен консольно якорь „ 15 с линейными проводниками 16 и лобовыми частями 17. В зоне линейных проводников установлены полюсные наконечники 18 основной магнитной системы 19 с катушкой 20. Магнитная система 19 установлена в зоне позиционирования робота. На корпусе привода установлен суппорт 21 со щетками 22, которые контактируют с коллектором 23.
Якорная секция (фиг. 2) состоит из участка линейных проводников 16 и лобовых частей. Лобовые части секции включают боковые 2 и 25 и центральный 26 участки.
Дополнительная магнитная система установлена в зоне лобовых частей 17 на основании 27. Она имеет магнито- провод 28, катушку 29 и полюсные наконечники 30, установленные у лобовых частей 17.50
Привод работает следующим образом.
При приходе модуля в точку позиционирования якорь 15 помещается в зазоре между полюсами 18 основной магнитной системы 19 (линейные про- , водники 16) и между полюсами 30 дополнительной магнитной системы 28 (лобовые части 17). Включается пита35
40
45
0
5
0
5
ние модуля, ток по щеткам 22 подводится к якорю 15- До этого момента времени пружины 12 поджимают обоймы 11 с подшипниками 10 к диску 7. Накладки 9 прижаты к накладкам 8, Диск 7, а следовательно, и входной 5 и выходной 3 валы редуктора 2 заторможены (при условии отсутствия люф га) Звено k зафиксировано относительно звена 1. При подаче тока в обмотку якоря в магнитном поле оказываются не только проводники 16 (поле основной магнитной системы 19). но и лобовые части 17 (после системы с магнитопроводом 28). Боковые участки 2Д и 25 лобовых частей (фиг. 2) симметричны, радиальные составляющие, усилия от них равны и направлены противоположно и практически компенсируют друг друга. Но осевые составляющие и усилие от тока в участке 26 ничем не скомпенсировано и направлено в сторону магнитных систем. Якорь 15 перемещается под действием этого усилия вправо во вращательно- поступательном подшипнике 13. С якорем перемещается и вал с диском 7. Фрикционный контакт накладок 8 и 9 разрывается. Одновременно ничего не мешает якорю 15 вращаться в подшипнике 13,таккак подшипники 10 в обой ме 11 не мешают диску 7вращаться Пружины 12 компенсируют усилие от участков ZC Лобовых частей.Смещение вала компенсируется шлицевым соединением б, Бал вместе с якорем вращает входной заг 5 редуктора 2, например волнового или планетарного, и вал 3 со звеном k, которое поворачивается относительно звена 1.
После поворота на требуемый угол ток выключается, усилие от лобовых участков становится равным нулю, диск 7 с валом 1 и якорем 15 под действием пружины 12, обойм 11 и подшипников 10 идет «лево. Накладки 9 прижимаются к накладкам 8 и вал 5 тормозится. Робот совершает дальнейшие региональные перемещения. Затем якорь 15 снова попадает в заданную точку позиционирования с магнитными системами, и цикл работы повторяется.
Формула изобретения
Привод робота-манипулятора, содержащий расположенную в его рабочей
зоне основную магнитную систему, установленный на роботе с возможное тью вращения якорь с обмоткой, связанный через редуктор с исполнитель ным органом, и тормоз с приволом перемещения его фрикционного элемен та, отличающийся тем, что, с целью упрощения конструкции, привод тормоза выполнен в виде до576308
полнительной магнитной системы, пи люса которой расположены перпендикулярно полюсам основной магнитной системы с возможностью их электромаг- нитного взаимодействия с лобовыми
частями обмотки якоря, а якорь установлен с возможностью продольного перемещения совместно с фрикционным элементом тормоза.
Фиг.З
