Изобретение относится к подъемио-транспортному машиностроению, а именно к рольгангам, исиольуемым в автоматических установках для подачи прямоугольных плоских заготовок, например печатных плат, и является усовершенствованием устройства по основному авт. св. № 1234290. Цель изобретения - повышение точности позиционирования каркаса с грузом в вертикальном положении. На фиг. 1 изображен рольганг, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - фиксирующий механизм и амортизатор, общий вид; на фиг. 7 - рольганг без кожуха, вид сверху; на фиг. 8 - вид Г на фиг. 7; на фиг. 9 - вид Д на фиг. 8. Рольганг содержит неподвижную раму 1, каркас 2, в котором установлены цилиндрические ролики 3, связанные с приводом 4 зубчатой передачей. На оси каждого ролика 3 с одной стороны установлено червячное колесо 5, находящееся в зацеплении с одним из червяков 6, выполненных в виде втулок, жестко зафиксированных на продольном валу 7, связанном с приводом 4. В каркасе 2 перпендикулярно оси 8 последнего по ходу движения груза ролика 3 выполнены направляющие 9, в которых установлены подпружиненные относительно каркаса 2 опоры 10, несущие вал 11 с роликом 12, аналогичным ролику 3 рольганга. На одном конце вал 11 несет цилиндрическое-зубчатое колесо 13, находящееся в зацеплении с таким же колесом 14, установленным на оси последнего по ходу движения груза ролика, а опоры 10 имеют каждая кронштейн 15, выходящий за габариты каркаса. На каркасе 2 установлены неподвижно датчик 16 и подвижно датчик 17. Каждый датчик состоит из электроиндукционного датчика 18 и взаимодействующего с ним шунта 19, который одновременно взаимодействует с грузом (пластиной) 20. Каркас 2 закреплен на П-образном кронштейне 21, содержащем на выступающих стержнях втулки, из которых втулка 22 - гладкая, а втулка 23 - щлицевая, :причем последняя связана шлицевым валом 24 с червячным колесом 25 редуктора привода 26 поворота, а гладкая втулка напрессована на подщипниках качения 27 и несет регулируемый шунт 28, имеющий возможность взаимодействия с двумя электроиндукционными датчиками 29 и 30. На основании рамы 1 установлен фиксирующий механизм 31 и амортизатор 32, а на раме 1 - электроиндукционный датчик 33, причем фиксирующий механизм 31, амортизатор 32 и датчик 33 установлены с возможностью контакта с каркасом 2 в его нижнем вертикальном положении. Фиксирующий механизм 31 состоит, из двух электромагнитов 34, установленных соосно на кропI83 штейне 35, и рычага 36, связанного шарнирно одним плечом при помощи планки 37 со щтоками 38 э;1СКтромагнитоБ 34, а другим плечом посредством оси 39 - с кронилтейном 35. Свободное плечо 40 рычага 36 несет ролик 41, периодически контролируюп-1ий с каркасом 2. Фиксирующий механизм 31 связан с электроиндукционным датчиком 33 и оба они связаны с системой 42 управления рольганга. .Амортизатор 32 кренится к раме 1 опорой 43 и содержит цилиндрический корпус 44 с отверстием, по оси которого жестко установлен палец 45. Соосно последнему расположена цилиндрическая пружина 46 сжатия, контактирующая одним концом с опорой 43, а другим со стаканом 47, который имеет возможность перемещаться в отверстии корпуса 44. На основании стакана 47 установлен упругий элемент 48, периодически контактирующий с каркасом 2 рольРольганг работает следующим образом. Груз в виде пластины 20 устанавливается на ролики 3. Срабатывает датчик 17, который включает привод 4, и ролики 3 начинают вращаться. Пластина 20 перемещается по рольгангу, гюпадает под ролик 12 и втягивается роликами (валковой клетью), пока не сработает датчик 16, при этом привод 4 отключается и включается привод поворота 26 рольганга. Датчики 29 и 30 от воздействия 1пунта 28 дают обратную связь об этапах поворота рольганга: датчик 29 о начале поворота рольганга из горизонтально го положения в вертикальное, а датчик 30 дает сигнал об установке рольганга в вертикальное положение. При повороте в вертикальное положение каркас 2 контатирует с шунтом датчика 33, который дает обратную связь на систему 42 управлепия рольганга, после чего срабатывает фиксирующий механизм 31. Штоки 38 электромагнитов 34. перемеп1аясь влево, при помощи планки 37 поворачивают рычаг 36 относительно оси 39 и заводят ролик 41 на выступ каркаса 2. Одновременно каркас 2 нажимает на элемент 48 амортизатора 32, сжимая тем самым пружину 46. После отключения привода 26 поворота рольганга пружина 46 через элемент 48 дожимает каркас 2 к роликч 41 фиксирующего механизма 3. После этого груз 20 захватывается автооператором (не показан) и на кpoнпJтeйны 15 воздействуют нажимные элементы (не показаны)- которые разжимают валковую клеть, высвобождая груз. Автооператор уносит груз и цикл повторяется. Подпружиненные опоры 10 возвращают вал 11 до контакта с приводным валом. Использование в рольганге фиксирующего механизма, связанного с датчиком, и амортизатора позволит повысить точность позициопирования каркаса и вертикальном положении за счет выбора люфтов, возникающих в кинематических парах привода поворота, а также за счет компенсации погрешностей положения каркаса, имеющих место при отклонении привода поворота.
Формула изобретения
1. Рольганг по авт. св. № 1234290, отличающийся тем, что, с целью повышения точности позиционирования каркаса с грузом в вертикальном положении, он снабжен установленными на неподвижной раме с возможностью взаимодействия с концом каркаса фиксирующим механизмом и пружинным амортизатором и связанным с фиксирующим механизмом электроиндукционным датчиком.
2. Рольганг по п. 1, отличающийся тем, что фиксирующий механизм выполнен в виде вилки и связанных с ней пары электромагнитов, закрепленных на неподвижной раме рольганга.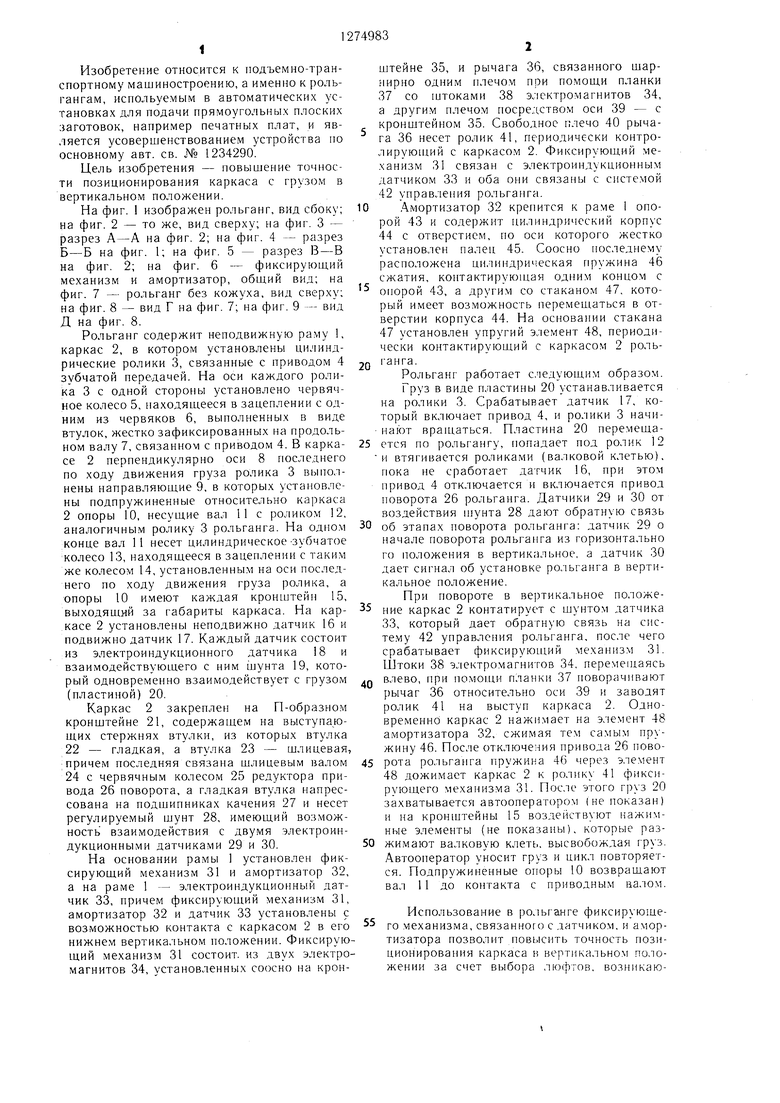
| название | год | авторы | номер документа |
|---|---|---|---|
| Рольганг | 1984 |
|
SU1234290A1 |
| Автоматическая линия для металлизации плоских деталей | 1984 |
|
SU1242544A1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765316C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765389C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765390C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765322C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765514C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765388C1 |
| Стенд для испытания пневматических шин и упругих элементов подвесок транспортных средств | 2021 |
|
RU2765193C1 |



Фиг. г
А - А поёермуто
Фиг.З Фиг. 6 2 8 7 6 41 I/ 45
29
ш
28
| Рольганг | 1984 |
|
SU1234290A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
