Изобретение отнчсится к виутри- цеховоьгу транспорту.
Целью изобретения является повышение производительности.
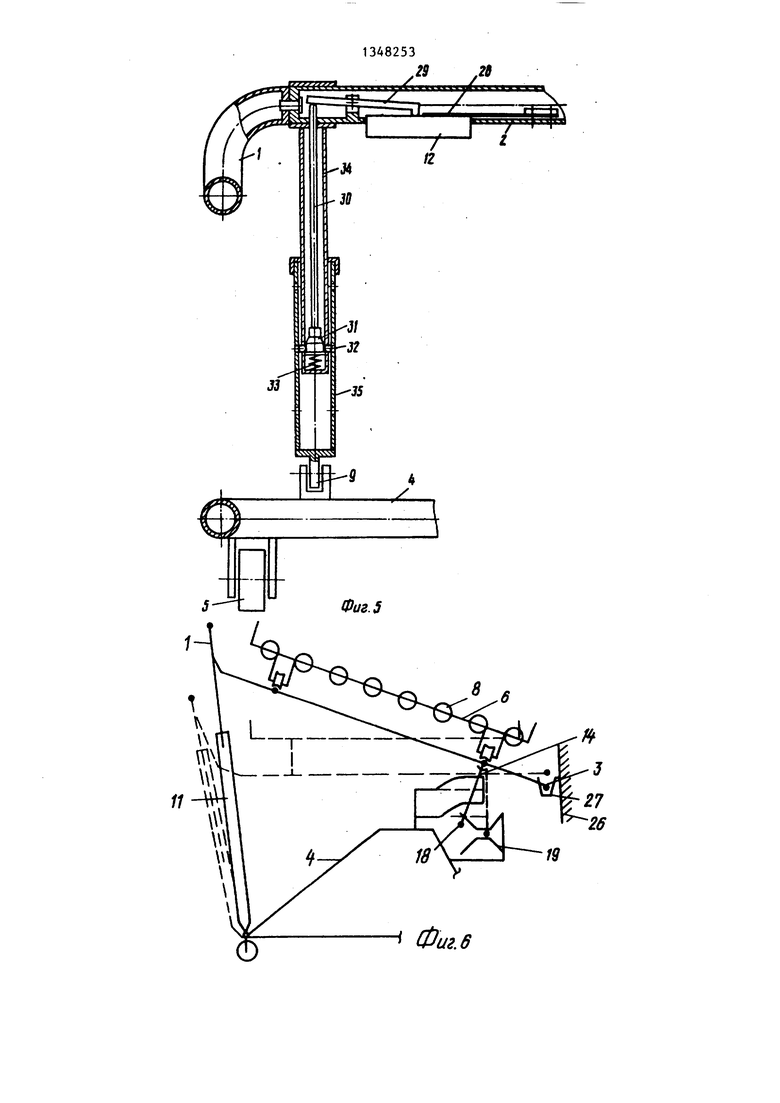
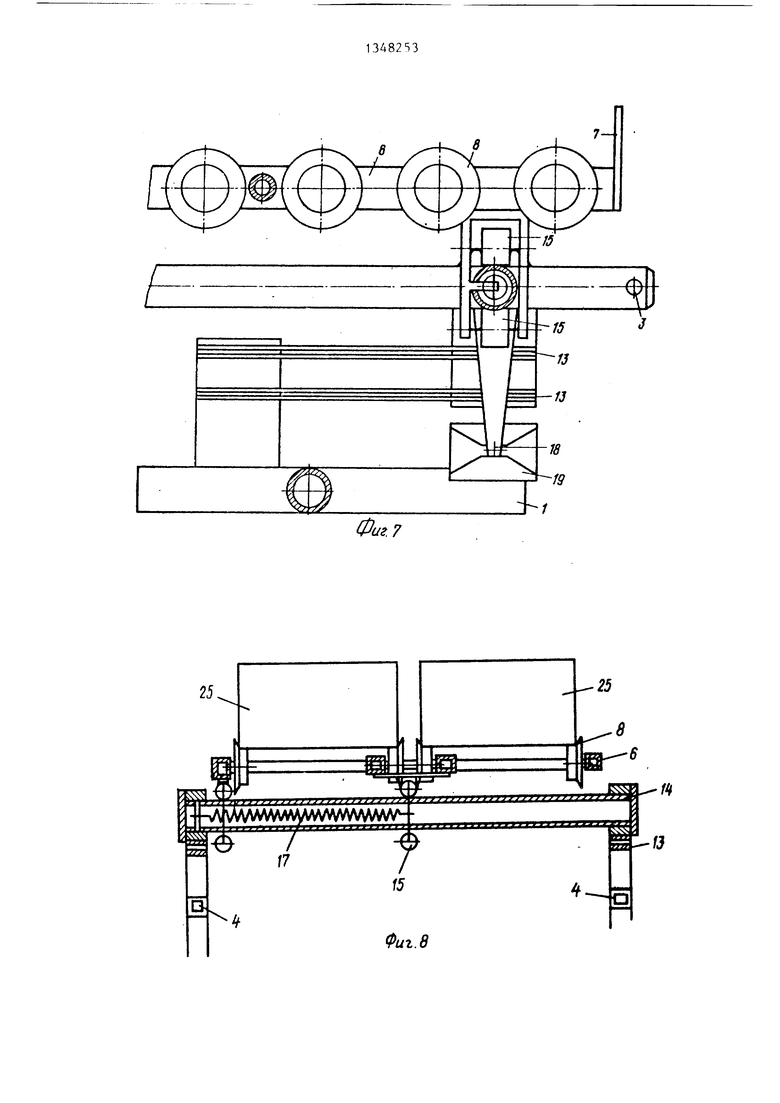
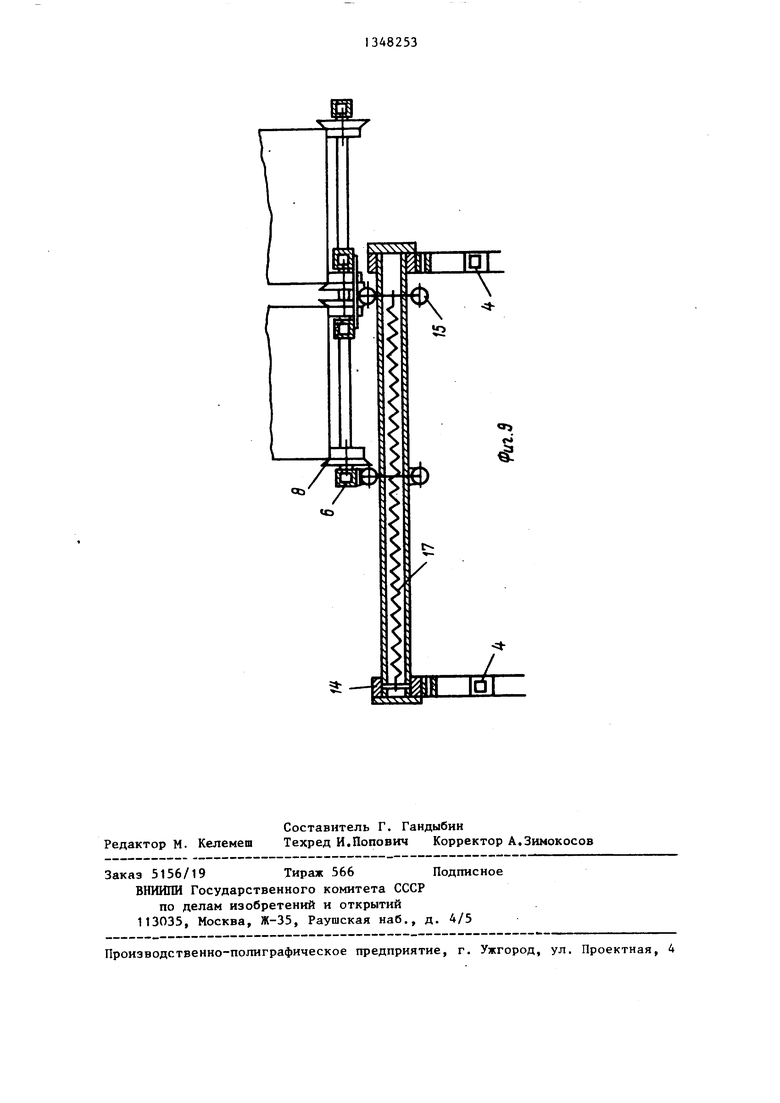
ila фиг.1 изображена схема предлагаемого устройства, на Лиг. 2 - датчик наличия кассеты с печатными платами; на фиг.З - предлагаемое устройство у поста загрузки кассетами автоматической аптооператорной линии гальванохимической обрабоаки печатных плат; на фиг.4 - то же, у поста выгрузки кассет .ческой линии, па фиг.З - телескопическая ттл.нга,, на фиг. 6 - конструкпия ме7.анизма позиционирования, па фиг,7 - то же, поста загрузкиj на фиг.З - механизм перемещения груз ОБО; платформы, на иг. 9 - рабочее положение г рузовой гшатформы перед началом обработки кассет.
Устройство для трапспортиро.чапия ассет с печатными платами содержит грузонесущую платформу с рукояткой 2 и фиксаторами пололчения 3 па авто- операторпой линии гальвапохимической бработки, раму 4 с ходовыми ;плесами 5, рольг:1пгову о ceKiniii) 6 с упорами 7 и рольгангом 8 для кассет. Грузо- несущая платформа 1 и рама 4 связаны между co6oi i стойками: каждая из стоек со стороны рукоятки 2 посредством шарниров 9 и И) соеди ена с грузоне- сущей платформо 1 и рамой 4, Стойки выполнены в виде телескопическпх штанг 1 1 , имею1цт три фиксиронан1 ых положения по д.чине 12 - клл11ип;а на рукоятке 2. С противоположно; стороны рукоятки 2 каж;т,ая из стоек выполнена в виде копсольно закре1тленной на раме 4 листовой рессоры 13 с цилиндрической опорой 14 на свободном конце.
Рольганговая секция 6 предлагаемо- 45 лие через тягу 30 на конус 31, перего устройства выполнена по крайней мере двухсекционной в продольном направлении. Б каж/т,ой из секций имеется рольганг В для установки кассет. Секция 6 установлена на роликах 15 с возможностью перемещения по направляющим 16 грузонесущей платформы 1 и подпружинена относительно последней
мещаясь, последний отпускает шарики и замковое устройство щтанги открывается. За рукоятку 2 наклоняют гру зонесущую платформу 1 в сторону ав- 50 тооператорной линии 26 до соединени фиксатора 3 с захватом 27 линии (на чертеже показано упрощенно). Платфо ма 1 поворачивается в цилиндрических опо1)ах 14 на направляющей 16 (права
пружиной 17. Одна из направляющих 16
грузонесущей платформы 1 свободно ус- 55по фиг.1). При наклоне Г-образный
таповлена на цилиндрических опорах 14рычаг 18, жестко закрепленньп на
и имеет Г-образный рычаг IB, взаимо-направляющей 16, поворачивается и
действующий с фиксатором 19 угловоговыходит из зацепления с фиксатором
положения рольганговой секции 6. Сек-19, освобождая платформу 1. Освобож
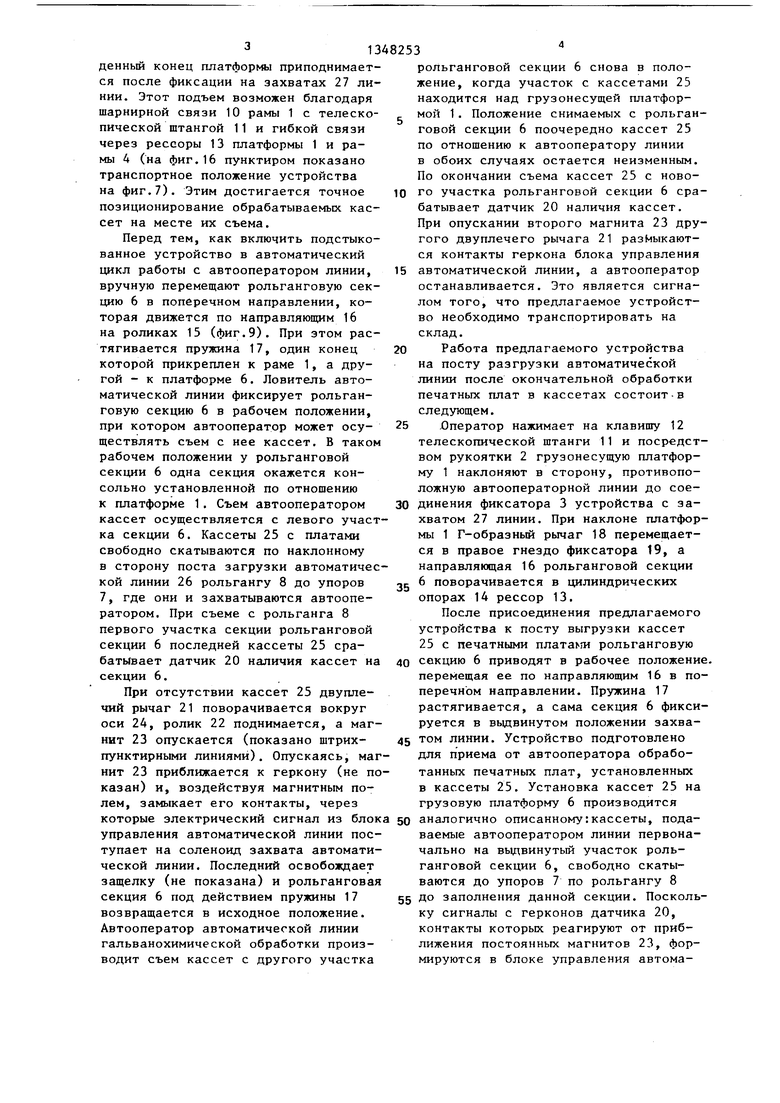
ПИЯ 6 имеет датчик 20 натшчия кассет с печатными платами, выполненньй в виде размещенного в разрыве рольган- га 8 каждой из секций двуплечего рычага 21 с роликом 22 и магнитом 23 на противоположных плечах. Рычаги 21 установлены с возможностью поворота относительно поперечной оси 24.
Перевозимый груз 25 - например, кассета с печатными платами. Автоматическая автооператорная линия 26 гальванохимической обработки снабжена захватом 27, взаимодействующим
с. фиксатором 3.
Плоская прулсина 28 служит для возврата клавиши 12, взаимодействующей с двуплечим рь чагом 29, давящим одним из своих концов на стержень
30, на нижнем к онце которого выполнен конус 31. Копус 31 взаимодействует с шариками 32, стержень 30 подпружинен пружиной 33.
Телескопическая щтанга 11 состоит
из двух вставленных одна в одну труб 34,35, имеющих возможность перемещаться. Фиксирование труб производится при помощи шариков 32, которые распираются конусом 31 под воздействием на последний пружины 33. Для
освобождения фиксированного положения служит клавиша 12, взаимодействующая через рычаг 29 с тягой 30.
Устройство работает следующим образом.
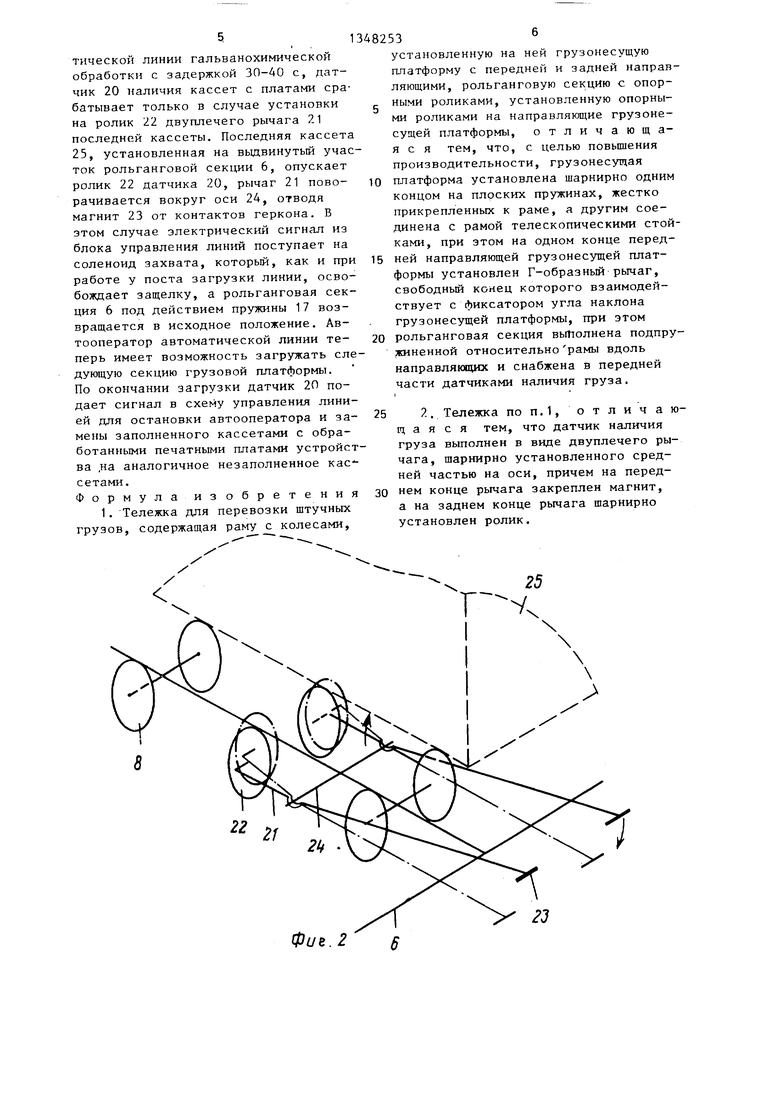
При горизонтальном положении рольганговой секции 6 на ее рольганги 8 до заполнения секций устанавливают кассеты 25 с печатными платами и
транспортируют устройство к автоматической автооперативной линии 26 гальванохимической обработки (фиг,3), нажимают на клавишу 12, поворачивающийся на оси рычаг 29 передает усимещаясь, последний отпускает шарики и замковое устройство щтанги открывается. За рукоятку 2 наклоняют грузонесущую платформу 1 в сторону ав- тооператорной линии 26 до соединения фиксатора 3 с захватом 27 линии (на чертеже показано упрощенно). Платформа 1 поворачивается в цилиндрических опо1)ах 14 на направляющей 16 (правая
денный конец платформы приподнимается после фиксации на захватах 27 линии. Этот подъем возможен благодаря шарнирной связи 10 рамы 1 с телескопической штангой 11 и гибкой связи через рессоры 13 платформы 1 и рамы 4 (на фиг.16 пунктиром показано транспортное положение устройства на фиг.7). Этим достигается точное позиционирование обрабатываемых кассет на месте их съема.
Перед тем, как включить подстыкованное устройство в автоматический цикл работы с автооператором линии, вручную перемещают рольганговую секцию 6 в поперечном направлении, которая движется по направляющим 16 на роликах 15 (фиг.9). При этом растягивается пружина 17, один конец которой прикреплен к раме 1, а другой - к платформе 6. Ловитель автоматической линии фиксирует рольганговую секцию 6 в рабочем положении, при котором автооператор может осуществлять съем с нее кассет, В таком рабочем положении у рольганговой секции 6 одна секция окажется кон- сольно установленной по отношению к платформе 1, Съем автооператором кассет осуществляется с левого участка секции 6. Кассеты 25 с платами свободно скатываются по наклонному в сторону поста загрузки автоматической линии 26 рольгангу 8 до упоров 7, где они и захватываются автооператором. При съеме с рольганга 8 первого участка секции рольганговой секции 6 последней кассеты 25 срабатывает датчик 20 наличия кассет на секции 6.
При отсутствии кассет 25 двуплечий рычаг 21 поворачивается вокруг оси 24, ролик 22 поднимается, а магнит 23 опускается (показано штрих- пунктирными линиями). Опускаясь, магнит 23 приближается к геркону (не показан) и, воздействуя магнитным полем, замыкает его контакты, через
которые электрический сигнал из блока §0 аналогично описанному:кассеты, подауправления автоматической линии поступает на соленоид захвата автоматической линии. Последний освобождает защелку (не показана) и рольганговая секция 6 под действием пружины 17 возвращается в исходное положение. Автооператор автоматической линии гальванохимической обработки производит съем кассет с другого участка
рольганговой секции 6 снова в положение, когда участок с кассетами 25 находится над грузонесущей платформой 1. Положение снимаемых с рольганговой секции 6 поочередно кассет 25 по отношению к автооператору линии в обоих случаях остается неизменным. По окончании съема кассет 25 с новоI D участка рольганговой секции 6 срабатывает датчик 20 наличия кассет. При опускании второго магнита 23 другого двуплечего рычага 21 разМыкают- ся контакты геркона блока управления
автоматической линии, а автооператор останавливается. Это является сигналом того, что предлагаемое устройство необходимо транспортировать на склад.
Работа предлагаемого устройства на посту разгрузки автоматической линии после окончательной обработки печатных плат в кассетах состоитв следующем.
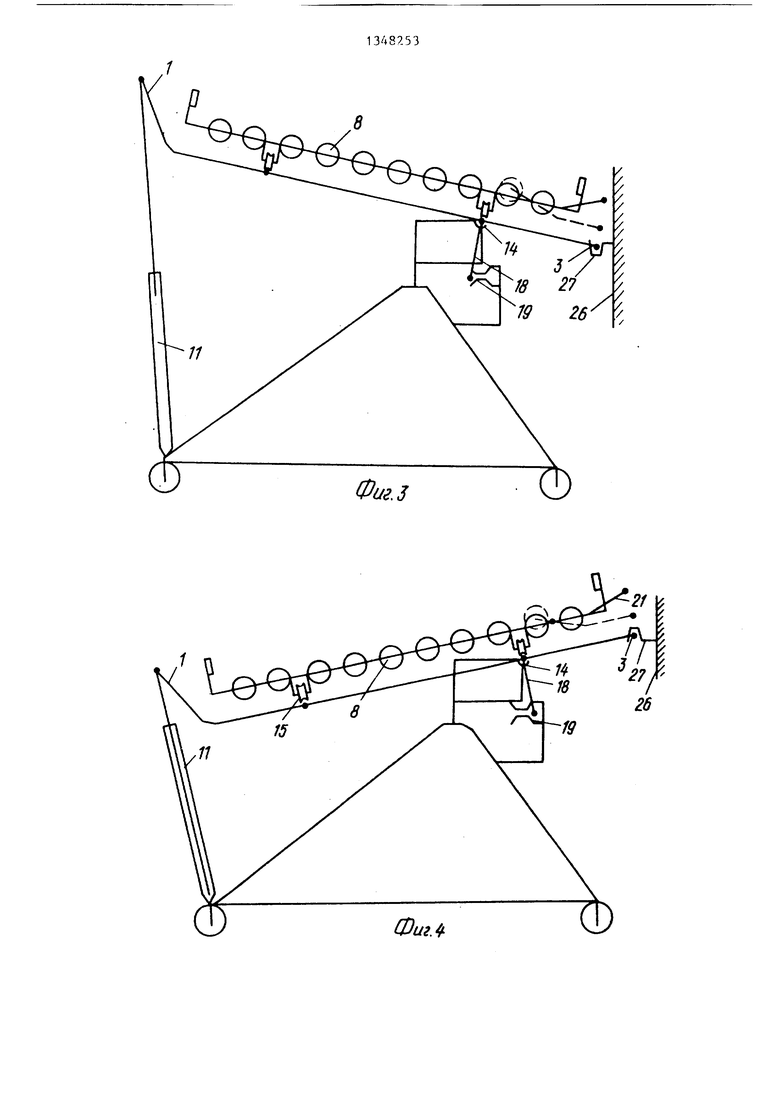
Оператор нажимает на клавишу 12 телескопической штанги 11 и посредством рукоятки 2 грузонесущую платформу 1 наклоняют в сторону, противоположную автооператорной линии до соединения фиксатора 3 устройства с захватом 27 линии. При наклоне платформы 1 Г-образный рычаг 18 перемещается в правое гнездо фиксатора 19, а направляющая 16 рольганговой секции 6 поворачивается в 1у1линдрических опорах 14 рессор 13.
После присоединения предлагаемого устройства к посту выгрузки кассет 25 с печатными плaтa И рольганговую
секцию 6 приводят в рабочее положение, перемещая ее по направляющим 16 в поперечном направлении. Пружина 17 растягивается, а сама секция 6 фиксируется в вьщвинутом положении захватом линии. Устройство подготовлено для приема от автооператора обработанных печатных плат, установленных в кассеты 25. Установка кассет 25 на грузовую платформу 6 производится
ваемые автооператором линии первоначально на выдвинутый участок рольганговой секции 6, свободно скатываются до упоров 7 по рольгангу 8 55 до заполнения данной секции. Поскольку сигналы с герконов датчика 20, контакты которых реагируют от приближения постоянных магнитов 23, формируются в блоке управления автома . .
тнческой линии гальванохимической обработки с задержкой 30-40 с, датчик 20 наличия кассет с платами срабатывает только в случае установки на ролик 22 двуплечего рычага 21 последней кассеты. Последняя кассета 25, установленная на вьщвинутый участок рольганговой секции 6, опускает ролик 22 датчика 20, рычаг 21 поворачивается вокруг оси 24, отводя магнит 23 от контактов геркона. В этом случае электрический сигнал из блока управления линий поступает на соленоид захвата, который, как и при работе у поста загрузки линии, освобождает защелку, а рольганговая секция 6 под действием пружины 17 возвращается в исходное положение. Автооператор автоматической линии теперь имеет возможность загружать следующую секцию грузовой платформы. По окончании загрузки датчик 20 подает сигнал в схему управления линией для остановки автооператора и замены заполненного кассетами с обработанными печатными платами устройства ,на аналогичное незаполненное кас-- сетами. Формулаиз обретения
1. Тележка для перевозки штучных грузов, содержащая paNry с колесами.
482536
установленную на ней грузонесущую платформу с передней и задней направляющими, рольганговую секцию с опор- ными роликами, установленную опорными роликами на направляющие грузоне- сущей платформы, отличающаяся тем, что, с целью повышения производительности, грузонесущая
10 платформа установлена шарнирно одним концом на плоских пружинах, жестко прикрепленных к раме, а другим соединена с рамой телескопическими стойками, при этом на одном конце перед15 ней направляющей грузонесущей платформы установлен Г-образный рычаг, свободный конец которого взаимодействует с фиксатором угла наклона грузонесущей платформы, при этом
20 рольганговая секция выполнена подпружиненной относительно рамы вдоль направляющих и снабжена в передней части датчиками наличия груза.
25 2. Тележка поп.1,отличаю- щ а я с я тем, что датчик наличия груза выполнен в виде двуплечего рычага, шариирно установленного средней частью на оси, причем на перед30 нем конце рычага закреплен магнит, а на заднем конце рычага шарнирно установлен ролик.
Фик.2
гз
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележка для перевозки штучных грузов | 1976 |
|
SU592651A1 |
| РАЗГРУЗОЧНО-ПЕРЕГРУЗОЧНЫЙ ПОСТ КОНВЕЙЕРНОЙ ЛИНИИ ПО ПРОИЗВОДСТВУ МНОГОСЛОЙНЫХ СТРОИТЕЛЬНЫХ БЛОКОВ С ДЕКОРАТИВНОЙ ЛИЦЕВОЙ ПОВЕРХНОСТЬЮ | 2004 |
|
RU2262437C1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Устройство для погрузки и разгрузки контейнеров и поддонов из транспортных средств | 1983 |
|
SU1161445A1 |
| Устройство для приема груза в проемы здания | 1989 |
|
SU1661332A1 |
| Способ штамповки деталей из полосового материала и установка для его осуществления | 1987 |
|
SU1586826A1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1049392A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Устройство для перегрузки плоских изделий | 1987 |
|
SU1518230A1 |
Изобретение относится к внутрицеховым транспортным средствам. Цель изобретения - повышение производительности. Устройство содержит раму 4 с колесами 5, грузонесущую платформу 1, установленную шарнирно на раме 4 с помощью плоских пружин 13 и соединенную с рамой телескопическими тягами 11. На грузонесущей платформе 1 подвижно установлена рольганговая секция 6, состоящая из двух участков и имеющая два рольганга. Секция 6 перемещается по грузонесущей платформе 1 по направляющим 16, при этом платформа 1 и секция 6 соединены пружина чи 17. Рольганговая секция снабжена датчиками 20 груза. 1 з.п. ф-лы, 9 ил. Ю (Л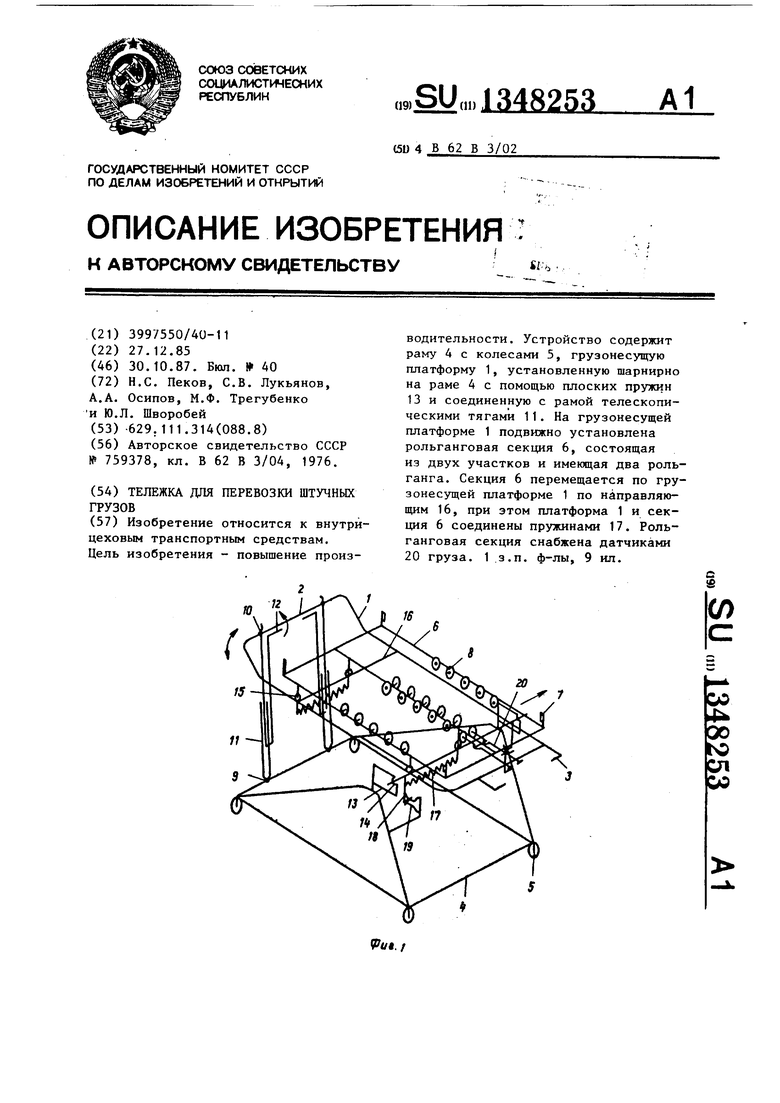
23
Фиг.6
Фиг.
25
7
Г7
13
Фиг.В
Редактор М. Келемеш
Составитель Г. Гандыбин
Техред И.Попович Корректор А.Зимокосов
Заказ 5156/19 Тираж 566 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 759378, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
