ю -vj
01
СП
о
ел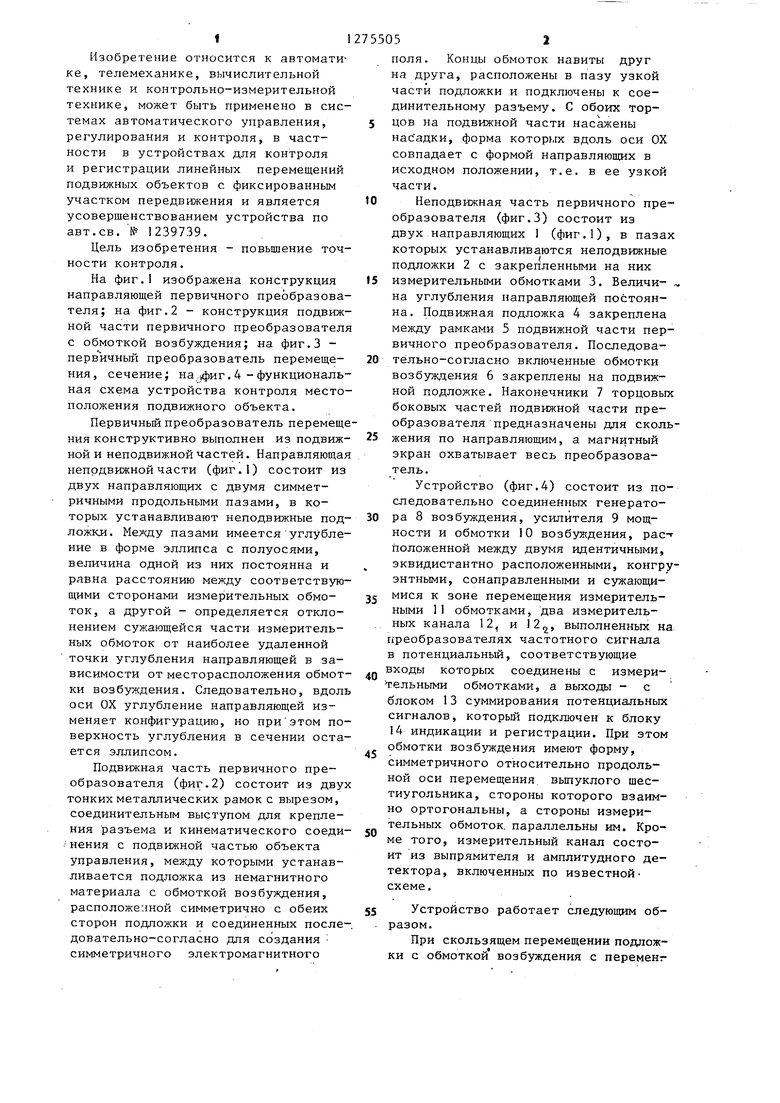
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1239739A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Устройство для контроля местоположения подвижного объекта | 1985 |
|
SU1305748A1 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1288737A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1324048A1 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1322348A1 |
| Трансформаторный вихретоковый преобразователь | 1986 |
|
SU1437770A1 |
| Трансформаторный преобразователь линейных и угловых перемещений | 1988 |
|
SU1536187A1 |
| Вращающийся вихретоковый преобразователь для контроля труб | 1989 |
|
SU1812485A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1262268A1 |
Изобретение относится к автоматике, телемеханике, вычислительной и контрольно-измерительной технике, может быть применено в устройствах контроля перемещений объектов с фиксированным участком передвиженияи является усовершенствованием изобретения по авт.св. № 1239739. Целью изобретения является повышение точности контроля. Для достижения указанной цели неподвижные направляющие преобразователя перемещения имеют продольное углубление, вьшолненное с образующей в форме эллипса, величина одной полуоси эллипса равна расстоянию между сторонами измерительных обмоток, а величина другой полуоси эллипса равна отклонению .сужающейся части измерительных обмоток от наиболее удаленной точки углубления направляющей. Неподвижные направляющие и подвижные рамки пре§ образователя вьшолнены из диамагнитных материалов. 1 з.п. ф-лы. (Л 4 ил.
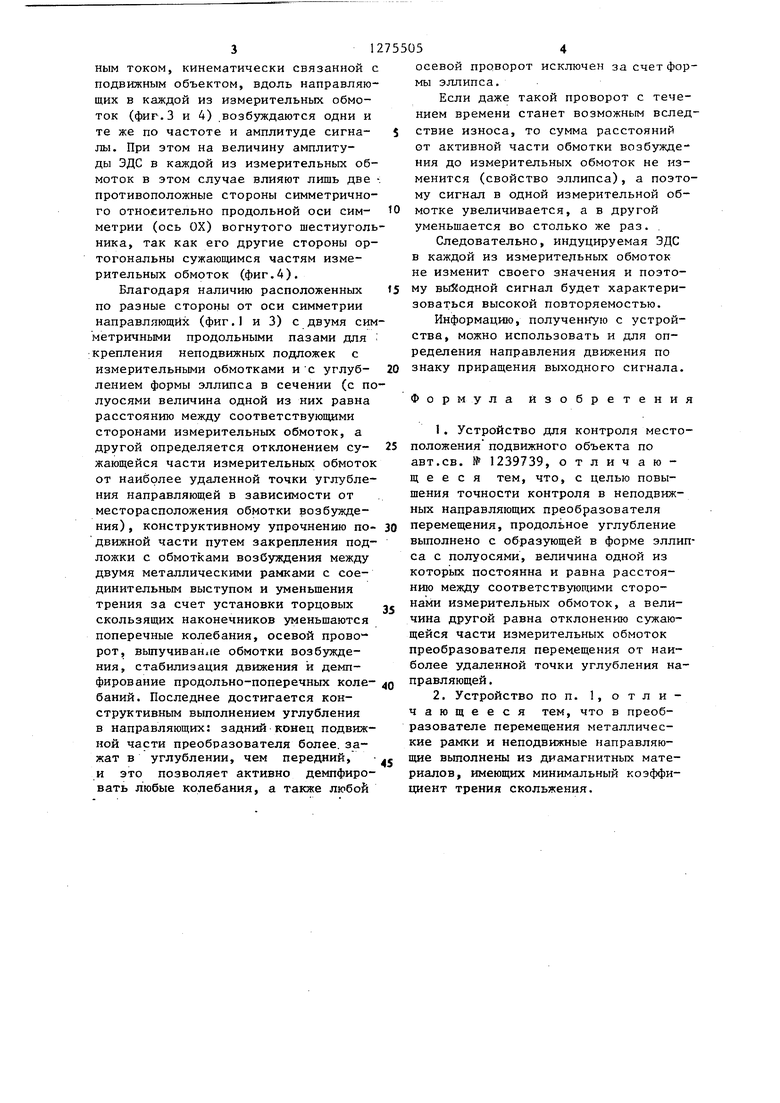
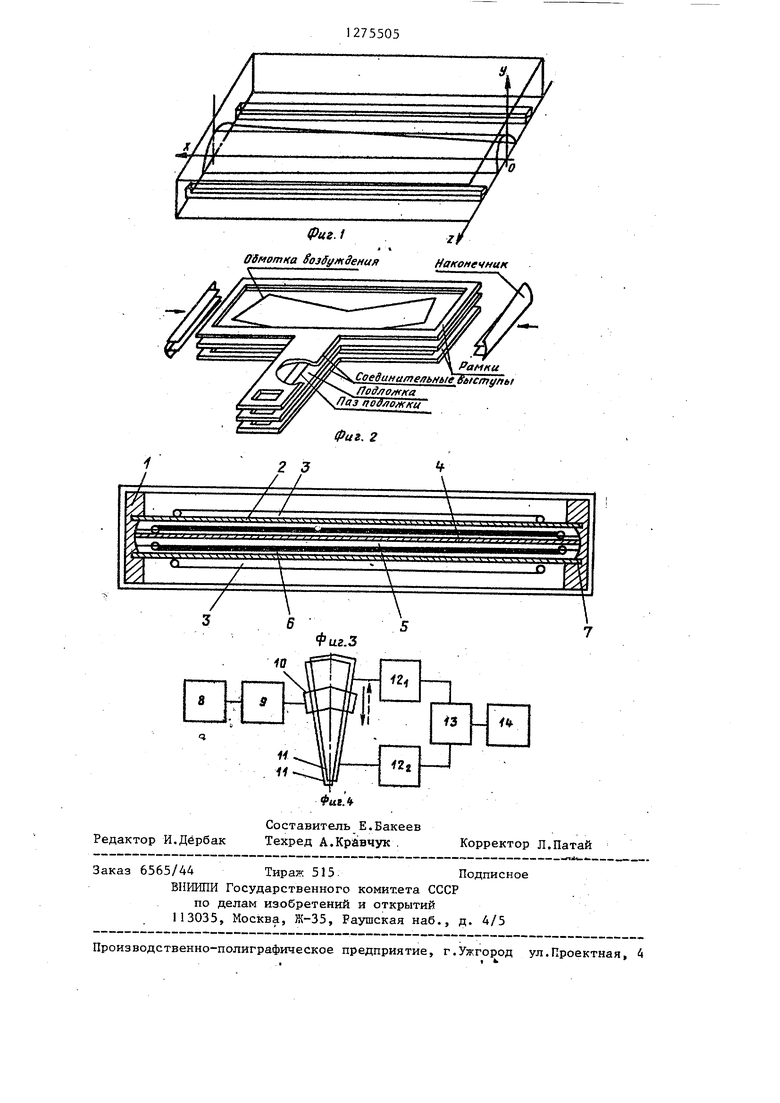
го Изобретение относится к автоматике, телемеханике, вычислител1зной технике и контрольно-измерительной технике, может быть применено в системах автоматического уиравления, регулирования и контроля, в частности в устройствах для контроля и регистрации линейных перемещений подвижных объектов с фиксированным участком передвижения и является усовершенствованием устройства по авт.св. 1239739. Цель изобретения - повышение точности контроля. На фиг.I изображена конструкция направляющей первичного преобразователя; на фиг.2 - конструкция подвижной части первичного преобразовател с обмоткой возбуждения; на фиг.З первичный преобразователь перемещения, сечение; .4 - функциональ ная схема устройства контроля место положения подвижного объекта. Первичньш преобразователь перемещ ния конструктивно выполнен из подвиж ной и неподвижной частей. Направляюща неподвижной части (фиг.1) состоит из двух направляющих с двумя симметричными продольными пазами, в которых устанавливают неподвижные под ложки. Методу пазами имеетсяуглубле ние в форме эллипса с полуосями, величина одной из них постоянна и равна расстоянию между соответствую щими сторонами измерительных обмоток, а другой - определяется отклонением сужающейся части измерительных обмоток от наиболее удаленной точки углубления направляющей в зависимости от месторасположения обмот ки возбуждения. Следовательно, вдол оси ОХ углубление направляющей изменяет конфигурацию, но приэтом по верхность углубления в сечении оста ется эллипсом. Подвижная часть первичного преобразователя (фиг.2) состоит из дву тонких металлических рамок с вырезом, соединительным выступом для крепления разъема и кинематического соеди -нения с подвижной частью объекта управления, между которыми устанавливается подложка из немагнитного материала с обмоткой возбуждения, расположенной симметрично с обеих сторон подложки и соединенных после довательно-согласно для создания симметричного электромагнитното поля. Концы обмоток навиты друг на друга, расположены в пазу узкой части подложки и подключены к соединительному разъему. С обоих торцов на подвижной части насажены насадки, форма которых вдоль оси ОХ совпадает с формой направляющих в исходном положении, т.е. в ее узкой части. Неподвижная часть первичного преобразователя (фиг.З) состоит из двух направляющих 1 (фиг.1), в пазах которых устанавливаются неподвижные подложки 2 с закрепленными на них измерительными обмотками 3. Величи- - на углубления направляющей постоянна. Подвижная подложка 4 закреплена между рамками 5 подвижной части первичного преобразователя. Последовательно-согласно включенные обмотки возбуж,чения 6 закреплены на подвижной подложке. Наконечники 7 торцовых боковых частей подвижной части преобразователя предназначены для скольжения по направляющим, а магнитный экран охватывает весь преобразователь. Устройство (фиг.4) состоит из последовательно соединенных генератора 8 возбуждения, усилителя 9 мощности и обмотки 10 возбуждения, рас- положенной между двумя идентичными, эквидистантно расположенными, конгруэнтными, сонаправленными и сужающимися к зоне перемещения измерительными 11 обмотками, два измерительных канала 12, и 12, выполненных на преобразователях частотного сигнала в потенциальный, соответствующие входы которых соединены с измериельными обмотками, а выходы - с блоком 13 суммирования потенциальных сигналов, который подключен к блоку 14 индикации и регистрации. При этом обмотки возбуждения имеют форму, симметричного относительно продольной оси перемещения выпуклого шестиугольника, стороны которого взаимно ортогональны, а стороны измерительных обмоток, параллельны им. Кроме того, измерительный канал состоит из выпрямителя и амплитудного детектора, включенных по известной схеме. Устройство работает следующим образом. При скользящем перемещении подложки с обмоткой возбуждения с перемент ным током, кинематически связанной подвижным объектом, вдоль направляю щих в каждой из измерительных обмоток (фиг.3 и 4) .возбуждаются одни и те же по частоте и амплитуде сигналы. При этом на величину амплитуды ЭДС в каждой из измерительных обмоток в этом случае влияют лишь две противоположные стороны симметричного относительно продольной оси симметрии (ось ОХ) вогнутого шестиуголь ника, так как его другие стороны ортогональны сужающимся частям измерительных обмоток (фиг.4). Благодаря наличию расположенных по разные стороны от оси симметрии направляющих (фиг.1 и 3) с двумя сим метричными продольными пазами для крепления неподвижных подложек с измерительными обмотками и с углублением формы эллипса в сечении (с по луосями величина одной из них равна расстоянию между соответствующими сторонами измерительных обмоток, а другой определяется отклонением сужающейся части измерительных обмоток от наиболее удаленной точки углубления направляющей в зависимости от месторасположения обмотки возбуждения) , конструктивному упрочнению подвижной части путем закрепления подложки с обмотками возбуждения между двумя металлическими рамками с соединительным выступом и уменьшения трения за счет установки торцовых скользящих наконечников уменьшаются поперечные колебания, осевой прово рот, выпучивание обмотки возбуждения, стабилизация движения и демпфирование продольно-поперечных колебаний. Последнее достигается конструктивным выполнением углубления в направляющих: задний конец подвижной части преобразователя более, зажат в углублении, чем передний, и это позволяет активно демпфировать любые колебания, а также любой 054 осевой проворот исключен за счет формы эллипса. Если даже такой проворот с течением времени станет возможным вследствие износа, то сумма расстояний от активной части обмотки возбуждения до измерительных обмоток не изменится (свойство эллипса), а поэтому сигнал в одной измерительной обмотке увеличивается, а в другой уменьшается во столько же раз. , Следовательно, индуцируемая ЭДС в каждой из измерительных обмоток не изменит своего значения и поэтому выгодной сигнал будет характеризоваться высокой повторяемостью. Информацию, полученную с устройства, можно использовать и для определения направления движения по знаку приращения выходного сигнала. Формула изобретения 1.Устройство для контроля местоположения подвижного объекта по авт.св. № 1239739, отличающееся тем, что, с целью повышения точности контроля в неподвижных направляющих преобразователя перемещения, продольное углубление выполнено с образующей в форме эллипса с полуосями, величина одной из которых постоянна и равна расстоянию между соответствующими сторонами измерительных обмоток, а величина другой равна отклонению сужающейся части измерительных обмоток преобразователя перемещения от наиболее удаленной точки углубления направляющей . 2.Устройство по п. 1, отличающееся тем, что в преобразователе перемещения металлические рамки и неподвижные направляющие вьтолнены из диамагнитных материалов, имеющих минимальный коэффициент трения скольжения.
| УСТРОЙСТВО для ПАНОРАМНОГО ОБЗОРА ИЗДЕЛИЙ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 0 |
|
SU239739A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
