Изобретение относится к автоматике, телемеханике, вычислительной и контрольно-измерительной технике и может быть применено в системах автоматического управления, регулирования и контроля, в частности в устройствах: для контроля и регистрации линейных перемещений подвижных объектов с фиксированным участком передвижения .
Цель-изобретения - расширение области применения устройства за счет уменьшения габаритов преобразователя линейных перемещений.
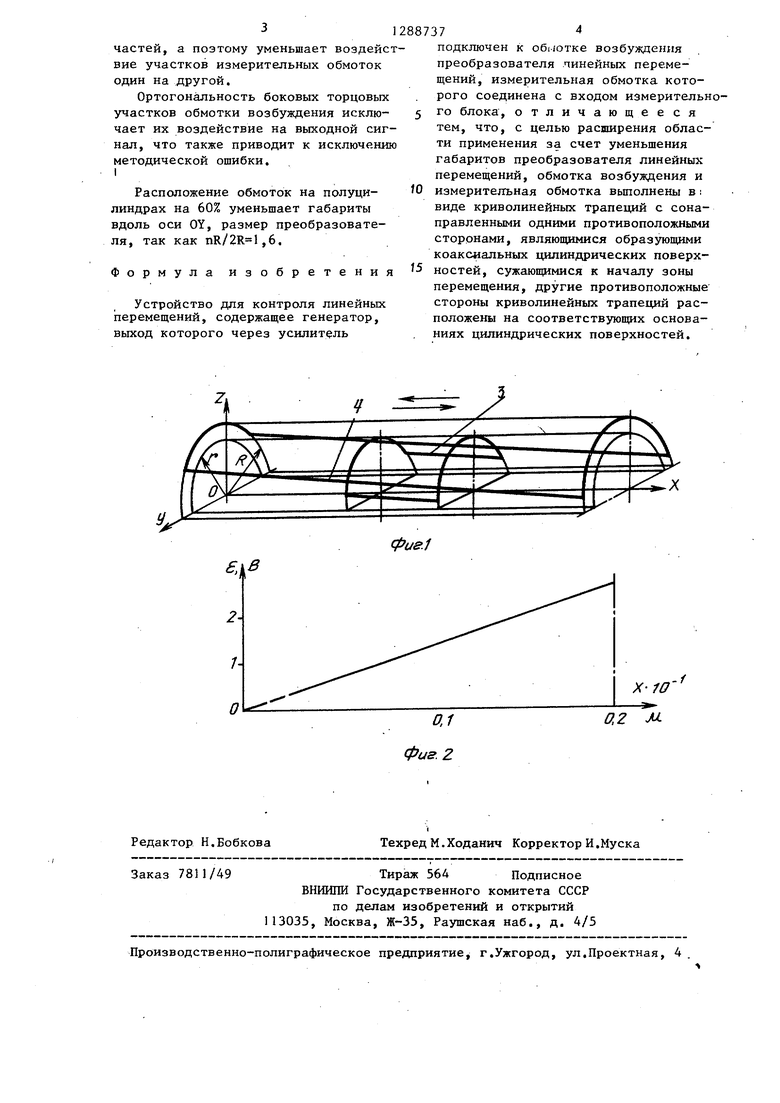
На фиг,I изображена конструкция обмоток возбуждения и измерительного первичного преобразователя; на фиг.2- выходная статическая характеристика устройства; на фиг.З - функционаяь- ная схема устройства для контроля линейных перемещений.
Первичный преобразователь конструктивно Бьтолнен из подвижной обмотки возбуждения и неподвижной измерительной обмотки (фиг.1). Принцип контроля позволяет неподвижной сделать обмотку возбз ждения, а передвигать измерительной обмоткой либо перемещать обеими обмотками одновременно. При этом выходной сигнал (фиг.2) не изменяется. v.
Устройство для контроля линейных перемещений подвижного объекта (фиг.З) содержит последовательно соединенные генератор 1, усилитель 2 обмотку 3 возбуждения, измерительную обмотку 4, измерительный блок (детектор) 5 и измерительный блок 6, при этом обмотки возбуждения и измерения выполнены в виде криволинейной трапеции с сонаправленными боковыми (активными), сужающимися к началу зоны перемещения, участками обмоток, расположенными друг под другом на коаксиальных полых полуцилиндрах (на фиг. и 3 показаны тонкими линиями) с разными радиусами оснований г и R симметрично относительно плоскости XOZ и с торцовыми относительно направления передвижения (ось ОХ) участками обмоток, ортогональными боковым участкам и параллельными один другому. С целью исключения влияния сужающихся частей обмотки измерения друг на друга на полуцилиндрах с меньшим радиусом основания установлена обмотка 3 возбуждения, а на полуцилиндре с большим радиусом
5
0
измерительная обмотка 4. Обмотки 3 и 4 на полуцилиндрах располагают так, что в конце зоны перемещения они (активные боковые участки) лежат
один под другим на общей радиальной оси.
.Устройство работает следующим образом.
При перемещении обмотки 3 возбуждения, кинематически связанной с подвижным объектом, в измерительной обмотке 4 возбуждаются одни и те же по частоте сигналы, амплитуда которых изменяется при изменении взаимного расположения обмоток. На выходную статическую характеристику устройства не оказьшают влияния торцовые части рамочного контура обмотки 3 возбуждения из-за ортогонального пространственного расположения относительно сужающихся частей, измерительной обмотки 4. Индуцируемые ча.стот- ные сигналы в измерительном блоке 5
г (состоящем, например, из избирательного фильтра, двухполупериодного выпрямителя и сглаживающей схемы) преобразуются в потенциальные сигналы, пропорциональные амплитудам частотных сигналов. С целью исключения воздействия внешних магнитных полей и помех измерительная обмотка зкра- нирована, а на входе измерительного канала стоит фильтр, настроенный на частоту генератора 1. На выходе изме- рительного блока 5 получают сигнал, характеризующий местоположение подвижного объекта, а с помощью измерительного блока 6 производится регистрация значений местоположения подвижного объекта в цифровой и/или аналоговой формах.
0
0
По приращению сигнала можно судить и о направлении перемещения
45 объекта. При положительном приращении объект перемещается от начала системы отсчета, а при отрицательном - к нему.
При перемещении обмотки 3 возбуж50 дения меняется относительное расположение контура обмотки возбуждения относительно контура измерительной обмотки 4, что и приводит к изменению выходного сигнала.
55 Пространственное расположение обмотки 3 возбз ждения на внутреннем полуцилиндре позволяет уменьшить габаритные размеры зтого контура и удалить активные участки от сужающихся
J 1
частей, a поэтому уменьшает воздейст вне участков измерительных обмоток один на другой.
Ортогональность боковых торцовых участков обмотки возбуждения исключает их воздействие на выходной сигнал, что также приводит к исключению
методической ошибки. I
Расположение обмоток на полуцилиндрах на 60% уменьшает габариты вдоль оси OY, размер преобразователя, так как nR/2R l,6.
Формула изобретения
Устройство для контроля линейных перемещений, содержащее генератор, выход которого через усилитель
887374
подключен к об1-ютке возбуждения преобразователя линейных перемещений, измерительная обмотка которого соединена с входом измерительно5 го блока, отличающееся тем, что, с целью расширения области применения за счет уменьшения габаритов преобразователя линейных перемещений, обмотка возбуждения и
О измерительная обмотка выполнены в; виде криволинейных трапеций с сона- правленными одними противоположными сторонами, являющимися образующими коаксиальных цилиндрических поверх 5 ностей, сужающимися к началу зоны перемещения, другие противоположные стороны криволинейных трапеций расположены на соответствующих основаниях цилиндрических поверхностей.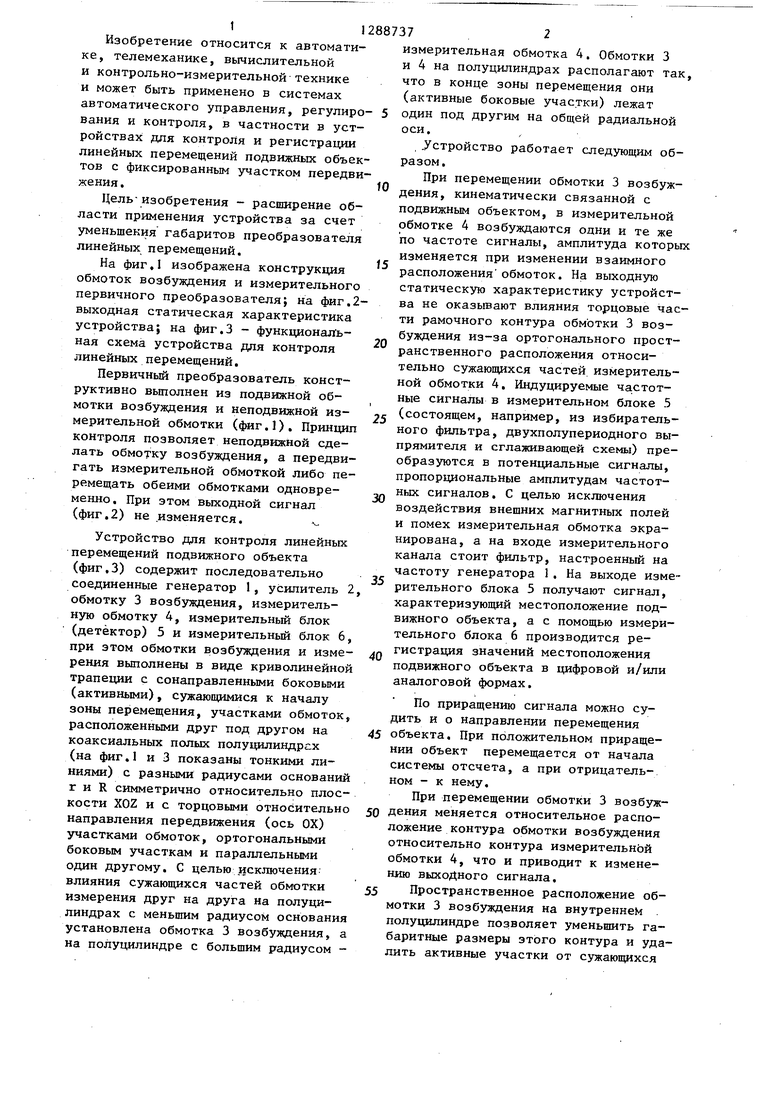
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1239739A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1324048A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1275505A2 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1322348A1 |
| Устройство для контроля местоположения подвижного объекта | 1985 |
|
SU1305748A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1262268A1 |
| ТРЕХКОМПОНЕНТНЫЙ СТРУЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ СКОРОСТИ | 2017 |
|
RU2654308C1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Датчик угловых перемещений | 1989 |
|
SU1620815A1 |
| Преобразователь угловых перемещений | 1984 |
|
SU1226034A1 |
Изобретение относится к автоматике, телемеханике, вычислительной и контрольно-измерительной технике и может быть применено в системах автоматического управления, регулирования и контроля,,в частности в устройствах для контроля и регистрации линейных перемещений подвижных объектов с фиксированным участком передвижения. Целью изобретения является расширение области применения устройства за счет уменьшения габаритов преобразователя линейных , перемещений. Устройство содержит последовательно соединенные генератор 1, усилитель 2, обмотку 3 возбуждения, измерительную обмотку 4, измерительный блок 5 (детектор) и измерительный блок 6, при этом обмотки возбуждения и измерения вьтол- нены в виде криволинейной трапеции с сонаправленными боковыми (активными) , сужающимися к началу зоны перемещения, участками обмоток, расположенными друг под другом на коак- сиальньпс полых полуцилиндрах. С целью исключения влияния сужающихся частей обмотки измерения друг на друга на полуцилиндрах с меньшим радиусом основания установлена обмотка 3 возбуждения, на полуцилиндре с большим радиусом-измерительная обмотка 4. Обмотки 3 и 4 на полуцилиндрах располагаются так, чтобы в конце зоны перемещения они (активные боковые участки) лежали друг под другом на общей радиальной оси, что на 60% уменьшает габариты вдоль оси OY, размер устройства. 3 ил. I (Л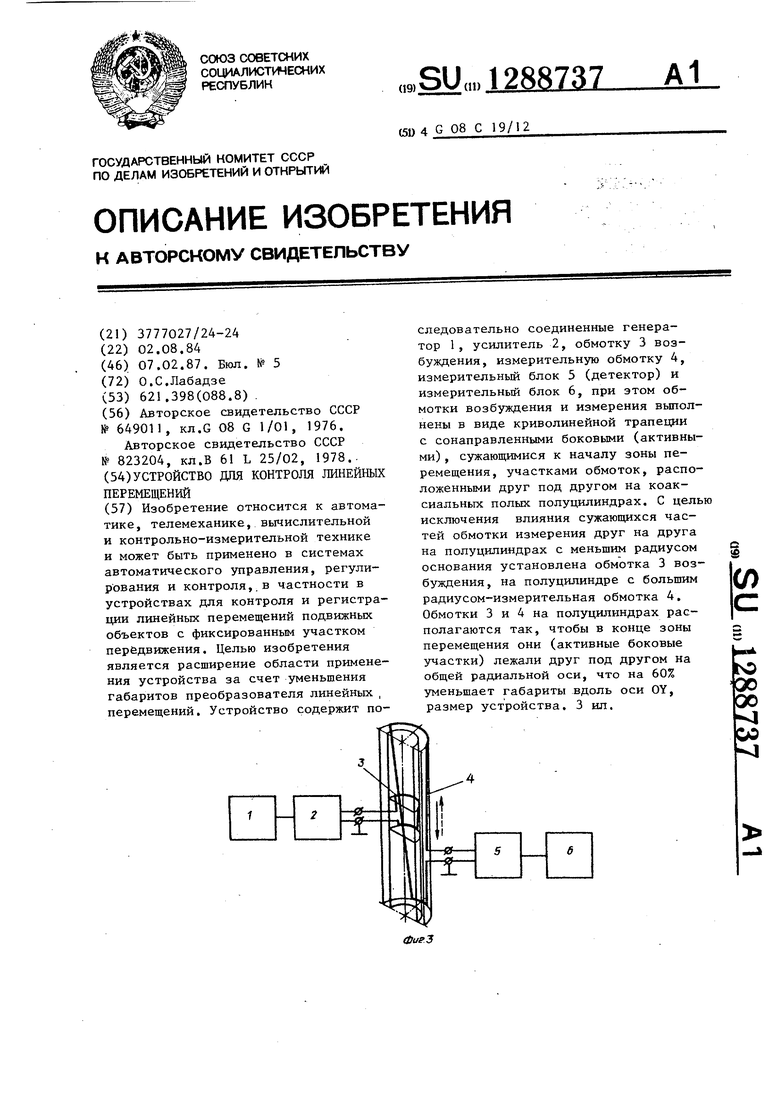
фиа.1
Х-Ю
.f
0,2 М.
Редактор Н.Бобкова
Заказ 7811/49
Тираж 56А Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие г.Ужгород, ул.Проектная, 4.
Техред М. Ходанич Корректор И .Муска
| Устройство для контроля направления движения подвижного механизма | 1976 |
|
SU649011A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
