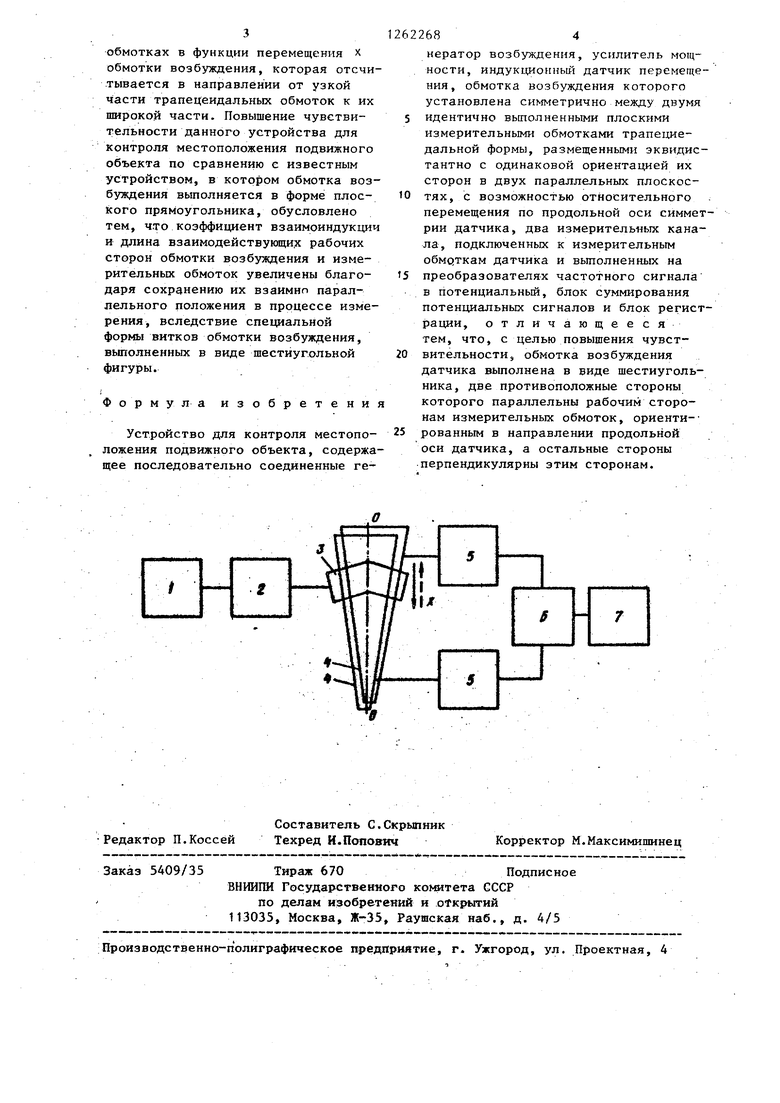
Изобретение относится к измерительной технике и может быть использовано в устройствах для измерения линейных перемещений и контроля положения подвижных объектов или механизмов с фиксированным участком передвижения. Целью изобретения является повышение чувствительности устройства для контроля местонахождения подвижного объекта за счет увеличения длины и коэффициента взаимноиндукдии взаимодействуюпщх рабочих сторон обмотки возбуждения и дифференци ально соединенных измерительных обмоток датчика перемещения, входящего в состав устройства. На чертеже представлена блок-схе устройства для контроля местоположения объекта. Устройство содержит последователь но соединенные генератор 1 возбуждения , усилитель 2 мощности и индукционный датчик перемещения, обмотка 3 возбуждения которого, установлена симметрично между двумя идентично выполненными плоскими измерительными обмотками А трапецеидальной формы с возможностью их относительного перемещения по продольной оси 0-0 датчика. Измерительные обмотки 4 ра положены эквидистантно в двух парал лельных плоскостях, причем их соответствующие стороны ориентированы одинаково. Обмотка 3 возбуждения вьшолнена в виде шестиугольника, две противоположные стороны которог параллельны рабочим сторонам измери тельных обмоток 4, ориентированным в направлении продольной оси 0-0 симметрии датчика перемещения, а ос тальные четьфе стороны - перпендику лярны указанным рабочим сторонам. Устройство контроля местоположения подвижного объекта (не показан), св зываемого в процессе измерения с об моткой 3 возбуждения датчика переме щения , содержит также два идентично выполненных измерительных канала 5, выполненных на преобразователях частотного сигнала в потен1Ц1аль ный и присоединенных входами к измерительным обмоткам 4 датчика,, Выходы каналов 5 подключены к блоку 6 суммирования потенциальных сигналов выходной сигнал которого подается на блок 7 регистрации. Устройство, работает следующим образом. При перемещении объекта в направлении X , совпадающем с продольной осью 0-0 симметрии датчика перемещения, изменяется расстояние между рабочими сторонами обмотки 3 возбуткдения и измерительных обмоток 4. В результате изменяется коэффициент взаимоиндукции между взаимодействующими рабочими сторонами этих обмоток, расположенными взаимно параллельно, что приводит к изменению величины наведенных в обмотках 4 ЭДС, Боковые стороны обмотки 3 возбуждения, перпендикулярные рабочим сторонам измерительных обмоток ,4, ориентированных в направлении указанного относительного перемещения, совпадающем с продольной осью датчика, не влияют на величину наведенной ЭДС благодаря их взаимной перпендикулярности. В случае изменения зазора между плоскостями обмотки 3возбуждения и измерительных обмоток 4увеличение наведенной ЭДС в одной из измерительных обмоток компенсируется уменьшением наведенной ЭДС в . другой измерительной обмотке благодаря дифференциальной конструкции датчика. Индукциированные в измерительных обмотках 4 сигналы поступают в измерительные каналы 5, на входах которых включены измерительные фильтры, настроенные на частоту возбуждающего сигнала генератора 1. Благодаря этому исключается воздействие внешних помех на плоские измерительные обмотки датчика. Измерительные потенциальные сигналы алгебраически суммируются (вычитаются) в блоке 6 и поступают в блок 7 регистрации. Так как ЭДС, индуцированная в каждой измерительной обмотке, пропорциональна расстоянию (зазору) между соответствующими параллельно расположенными рабочими сторонами этих обмоток и обмотки возбуждения датчика перемещения, которое, в свою очередь, зависит от положения обмотки возбуждения вдоль оси 0-0, а следовательно, и от положения объекта контроля, выходная статическая характеристика данного устройства представляет собой прямую пропорциональную зависимость, соответствующую алгебраической сумме ЭДС в обеих измерительных обмотках в функции перемещения X обмотки возбуждения, которая отсчи тывается в направлении от узкой части трапецеидальных обмоток к их широкой части. Повышение чувствительности данного устройства для контроля местоположения подвижного объекта по сравнению с известным устройством, в котором обмотка воз буждения выполняется в форме плоского прямоугольника, обусловлено тем, что коэффициент взаимоиндукци и длина взаимодействующих рабочих сторон обмотки возбуждения и измерительных обмоток увеличены благодаря сохранению их взаимно параллельного положения в процессе изме рения, вследствие специальной формы витков обмотки возбуждения, вьшолненных в виде шестиугольной фигуры. Формула изобретени Устройство для контроля местоположения подвижного объекта, содержа щее последовательно соединенные ге684кератор возбуждения, усилитель мощности, индукционный датчик перемещения, обмотка возбуждения которого установлена симметрично между двумя идентично вьсполненными плоскими измерительными обмотками трапециедальной формы, размещенными эквидистантно с одинаковой ориентацией их сторон в двух параллельных плоскостях, с возможностью относительного перемещения по продольной оси симметрии датчика, два измерительных канала, подключенных к измерительным обмрткам датчика и вьшолненных на преобразователях частотного сигнала в потенциальный, блок суммирования потенциальных сигналов и блок регистрации, отличающее с я тем, что, с целью повышения чувствительности, обмотка возбуждения датчика выполнена в виде шестиугольника, две противоположные стороны которого параллельны рабочим сторонам измерительных обмоток, ориенти-рованным в направлении продольной оси датчика, а остальные стороны перпендикулярны зтим сторонам.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ВИБРОУСКОРЕНИЯ И ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2834759C1 |
| Устройство для контроля местоположения подвижного объекта | 1985 |
|
SU1305748A1 |
| ИЗМЕРИТЕЛЬ ПЕРЕМЕЩЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2209388C1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1275505A2 |
| ИНДУКТИВНЫЙ УРОВНЕМЕР ЖИДКОМЕТАЛЛИЧЕСКОГО ТЕПЛОНОСИТЕЛЯ | 2013 |
|
RU2558010C2 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1239739A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1324048A1 |
| Устройство для контроля многокомпонентных перемещений | 1980 |
|
SU896657A1 |
| Трансформаторный преобразователь линейных перемещений | 1988 |
|
SU1527484A1 |
Изобретение относится к измерительной технике и позволяет повысить чувствительность устройства для контроля местоположения подвижного объекта путем вьтолнения обмотки возбуждения датчика йеремещения, в виде.шести угольника, две противоположные стороны которого параллельны рабочим сторонам двух измерительных обмоток, ориентированным в напра1влении возможнь1х перемещений объекта контроля, а остальные четыре стороны перпендикулярны этим сторонам измерительных обмоток. Обмотка возбуждения датчика размещена симметрично между обеими плоскими измерительными обмотками, имеющими форму трапеций. Благодаря такому выполнению и взаимному, расположению обмоток датчика обеспечивается увеличение длины и коэффициента взаимной индукции между взаимодействующими рабочими сторонами этих обмоток. При смещении обмотки возбуждения относительно измерительных обмоток изменяется расQ S стояние между параллельно расположенными взаимодействующими сторонасл ми обмотки возбуждения и измерительных обмоток, что приводит к изменению ЗДС, наведенных в них. Разность наведенных ЭДС пропорциональна положению обмоток возбуждения, а следовательно, и положению связываемого с нею объекта контроля. 1 ил. 0 3i fo to Од bo
| Преобразователь линейных перемещений | 1975 |
|
SU585399A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
