10
15
20
25
«1239739
Изобретение относится к автоматике, телемеханике, вычислительной технике, контрольно-измерительной технике и может быть применено в системах автоматического управления, регулирования и контроля, в частности в устройствах для контроля и регистрации линейных перемещений подвижных объектов с фиксированным участком передвижения .
Цель изобретения - повьшение точности контроля,
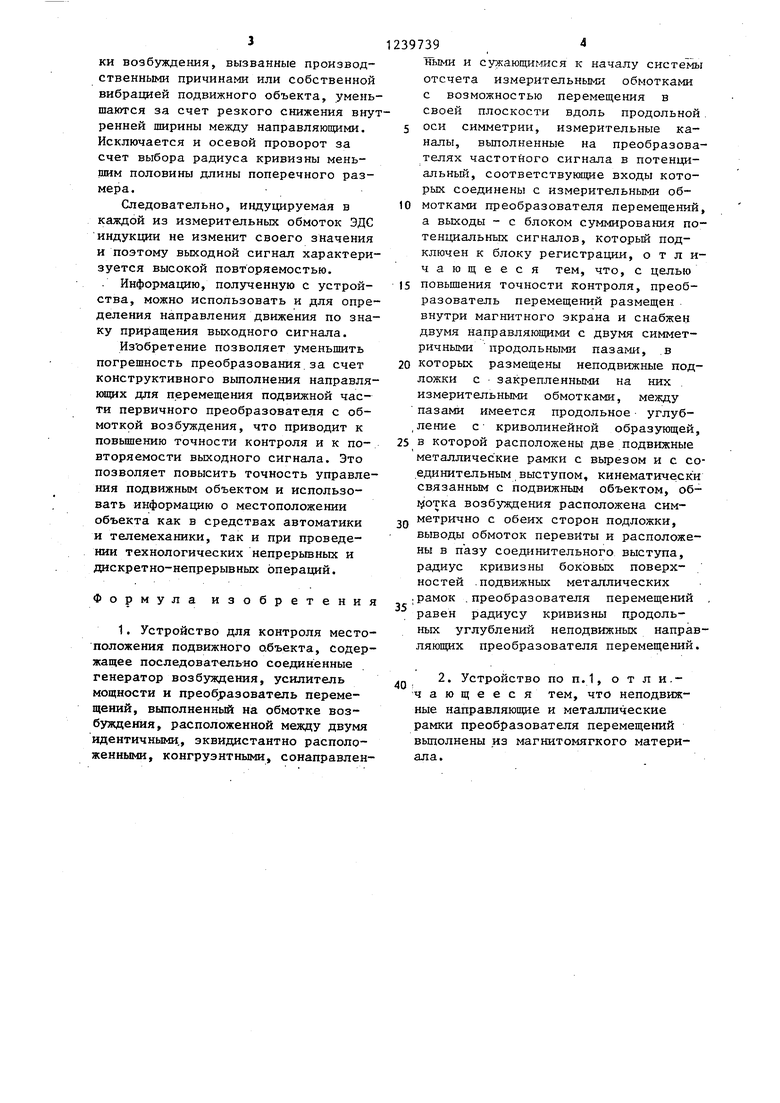
На фиг. 1 изображена конструкция подвижной части первичного преобразователя с обмоткой возбу:ждення; на фиг. 2 - первичньш преобразователь перемещений, сечение; на фиг. 3 - функциональная схема устройства конт- роля местоположения подвижного объекта.
Первичный преобразователь перемещений конструктивно вьшолнен из подвижной (фиг. 1) и неподвижной (фиг.2) частей. Подвижная часть первичного преобразователя состоит из двух тонких металлических рамок
с вырезом и соединителем для крепления соединительного разъема и кинематического подсоединения к подвижной части объекта з правления, между которыми жестко устанавливается подложка из немагнитного материала с обмоткой возбуждения., расположенной симметричнос обеих сторон подложки и соединенных последовательно согласно для создания симметричного электромагнитного поля, концы обмоток навиты один на другой и уложены в пазу узкой части подложки и подключены к соединительному разъему. Неподвижная часть первичного преобразователя (см.фиг.2) состоит из двух направляющих 1 с двумя сим- метричными продольными пазами, в которых устанавливаются неподвижные подложки 2 с закрепленныг ш на них измерительными обмотками3.Между пазами имеется углубление в виде дуги ок- ружности, радиус которых меньше половины длины поперечного (большего) размера подвижной подложки 4, за- крепленной между рамками.5 подвижной части первичного преобразователя. Скользящие поверхности подвижной части с обмоткой 6 возбуждения имеют тот же радиус, а магнитный экран 7 охватывает весь преобразователь.
30
35
40
45
50
55
ни жи н мо ра ны ко су та во пл из на ла вх ны ло ин нь но ту те ч
р
к н с ю м т к э п с т н т с о
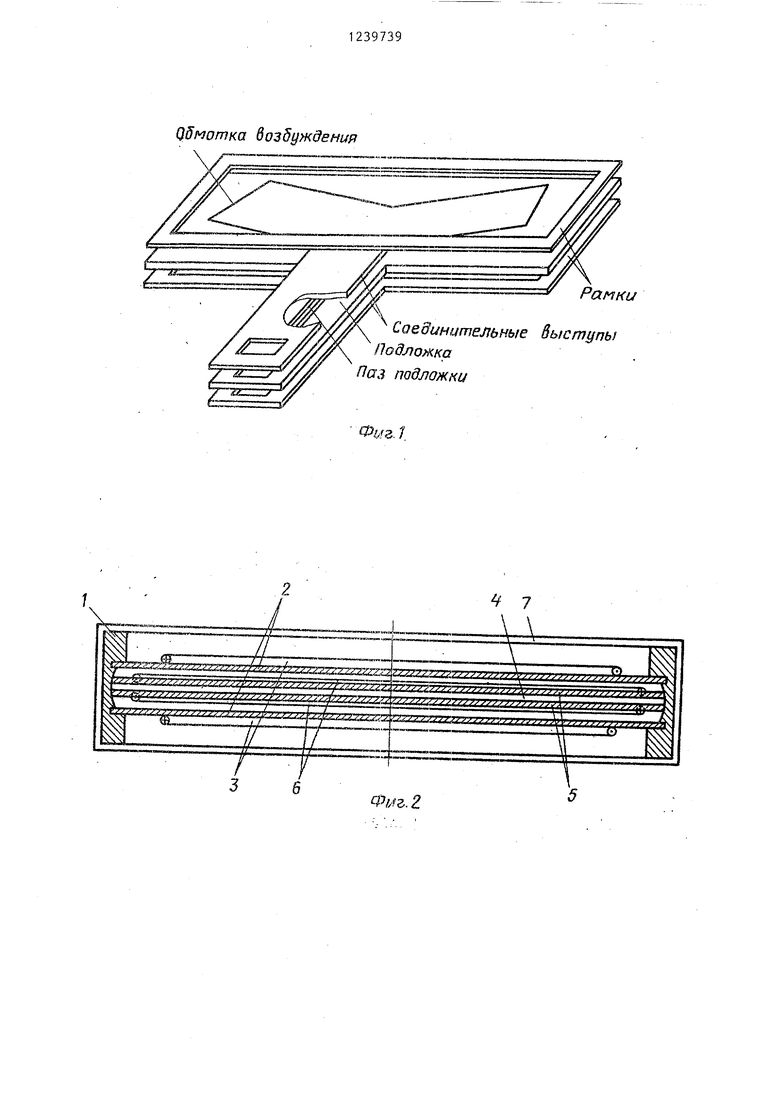
Устройство контроля местоположения подвижного объекта (фиг.З) содержит последовательно соединенные генератор 8 возбуждения, усилитель 9 мощности и обмотку 10 возбуждения, расположенную между двумя идентич- ными, эквидистантно расположенными, конгруэнтными, сонаправленными и сужаюш;имися к началу системы отсчета измерительными обмотками 11, с возможностью перемещаться в своей плоскости вдоль оси симметрии, два измерительных канала 12, вьшолненных на преобразователях частотного сигнала- в потенциальный, соответствующие входы которых соединены с измерительными обмотками, а выходы - с блоком 13 суммирования потенциальных сигналов, которьй подключен к блоку 14 индикации и регистрации. ИзмериТель- ньй канал 12 состоит из избирательного фильтра, настроенного на частоту генератора возбуждения, выпрямителя и амплитудного детектора, включенных по известной схеме.
Устройство работает следующим образом.
При скользящем перемещении подложки с обмоткой возбуждения с переме.н- ным током, кинематически связанного с подвижным объектом вдоль направляющих, в каждой из измерительных обмоток (фиг.1-3) возбуждаются одни и; те,же по частоте и амплитуде сигналы. При этом на величину амплитуды ЭДС в каждой из. измерительных обмоток, в этом случае, влияют лишь две противоположные стороны симметричного относительно продольной оси симметрии (ось ОХ) вогнутого шестиугольника, так как его другие стороны ортрго-. нальны сужаюпщмися частями измерительных обмоток (фиг. 3). Благодаря наличию расположенных по разные с то- роны от оси симметрии ОХ направляющих (фиг,2) с двумя симметричными продольными пазами для крепления неподвижных подложек с измеритель- обмотками с углублением .в виде дуги окрз ности, радиус которых меньше половины длины поперечного размера подвижной подложки, и конструктивному упрочнению подвижной части путем закрепления подложки с обмотками возбуждения между двумя мeтaлличecки ш рамками соединительными выступами поперечные, колебания, осевой проворот и выпучивание обмотки возбуждения, вызванные производственными причинами или собственной вибрацией подвижного объекта, уменьшаются за счет резкого снижения внутренней ширины между направляющими. Исключается и осевой проворот за счет выбора радиуса кривизны меньшим половины длины поперечного размера.
Следовательно, индуцируемая в каждой из измерительных обмоток ЭДС индукции не изменит своего значения и поэтому выходной сигнал характеризуется высокой повторяемостью. . Информацию, ползгченную с устройства, можно использовать и для определения направления движения по знаку приращения выходного сигнала.
Из обретение позволяет уменьшить погрешность преобразования.за счет конструктивного выполнения направля- кшщх для перемещения подвижной части первичного преобразователя с обмоткой возбуждения, что приводит к повьшгению точности контроля и к повторяемости выходного сигнала. Это позволяет повысить точность управления подвижным объектом и использовать информацию о местоположении объекта как в средствах автоматики и телемеханики, так и при проведении технологических непрерьшных и дискретно-непрерывных операций.
Формула изобретения
1. Устройство для контроля местоположения подвижного объекта, содержащее последовательно соединенные генератор возбуждения, усилитель мощности и преобразователь перемещений, вьтолненный на обмотке возбуждения, расположенной между двумя идентичными., эквидистантно расположенными, конгруэнтными, сонаправлен239739
ньгми и сужающимися к началу системы отсчета измерительными обмотками с возможностью перемещения в своей плоскости вдоль продольной . 5 оси симметрии, измерительные каналы, вьтолненные на преобразователях частотного сигнала в потенциальный, соответствующие входы которых соединены с измерительными об10 мотками преобразователя перемещений, а выходы - с блоком суммирования потенциальных сигналов, которьш подключен к блоку регистрации, о т л и- чающееся тем, что, с целью
15 повышения точности контроля, преобразователь перемещений размещен внутри магнитного экрана и снабжен двумя направляющими с двумя симметричными продольными пазами, .в
20 которых размещены неподвижные подложки с закрепленными на них . измерительными обмоткамн, между пазами имеется продольное углуб- ,ление С криволинейной образующей,
25 в которой расположены две подвижные металлические рамки с вырезом и с соединительным выступом, кинематически связанным с подвижным объектом, об- возбуждения расположена сим,р метрично с обеих сторон подложки, выводы обмоток перевиты и расположены в пазу соединительного выступа, радиус кривизны боковых поверхностей .подвижных металлических .рамок .преобразователя перемещений равен радиусу кривизны продольных углублений неподвижных направляющих преобразователя перемещений.
35
2. Устройство по П.1, о т л и,- 40
чающееся тем, что неподвижные направляющие и металлические рамки преобразователя перемещений вьщолнены из магнитомягкого материала.
QSMomxa боздуж&енир
Рамки
Соединительные Выступы Подложка Паз подложки
Фмг.1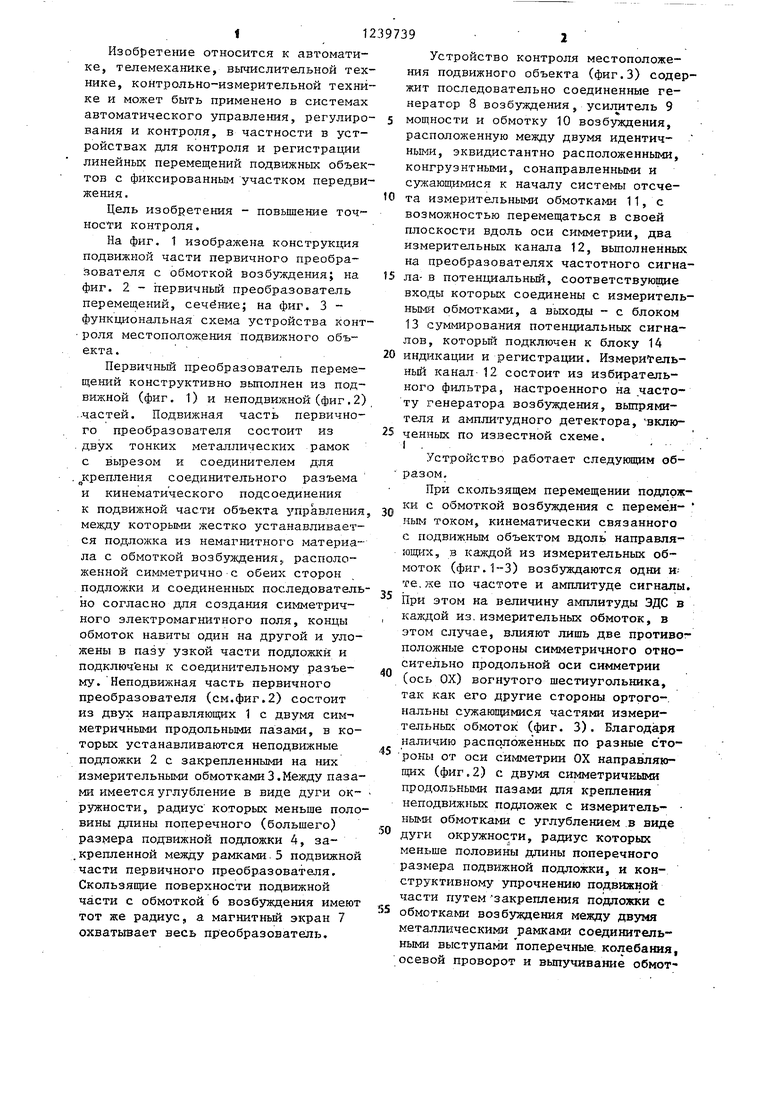
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1275505A2 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Устройство для контроля местоположения подвижного объекта | 1985 |
|
SU1305748A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1262268A1 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1288737A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1324048A1 |
| Устройство для контроля местоположения подвижного объекта | 1987 |
|
SU1642492A1 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1322348A1 |
| Трансформаторный датчик перемещений | 1989 |
|
SU1753246A1 |
| Трансформаторный преобразователь перемещений | 1984 |
|
SU1221494A1 |
.Jl..-J.J.,.: ,.ZX-,.jf....JU.. . M.IJ-,.
22гжс; 7 : у;7 ;у..У. |.
т™„
. / /
/у
ч 7
4
3§Г
jjx))
ffl
S
ii&.KfcA.
- f r,f
Фт.г
fO со :s
e
Составитель Е.Бакеев Редактор Н.Бобкова Техред О.Сопко
Заказ 3398/50 Тираж 515Подписное
ВНИИПИ Государственного когттета СССР
по делам изобретений и открытий 113035, Москва, Ж-35; Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор И.Муска
| Григорий-Рябов В.В | |||
| Радиолокационные устройства | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
