Изобретение относится к телеизмерениям и может быть использовано для контроля перемещений объектов с фиксированным участком передвижения.
Целью изобретения является повышение точности контроля.
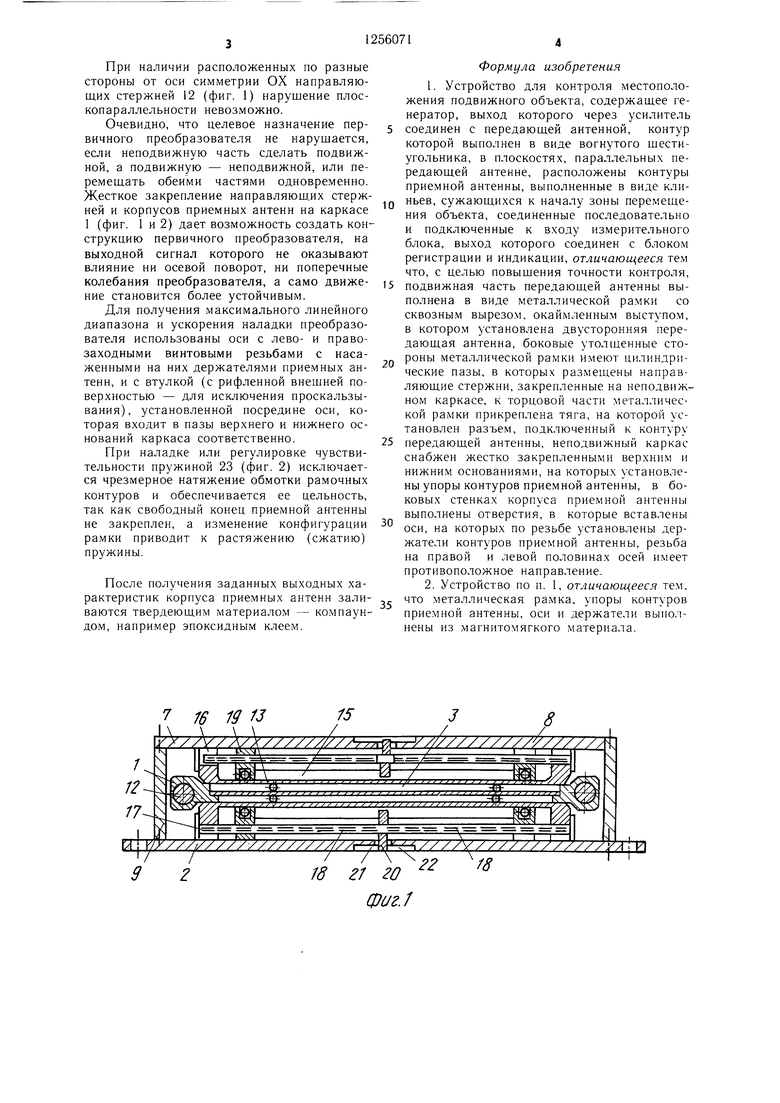
На фиг. 1 изображен первичный преобразователь перемеш,ения, поперечное сечение на фиг. - 2 конструкция первичного преобразователя; на фиг. 3 - функциональная схема устройства для контроля местоположения подвижного объекта.
Первичный преобразователь (фиг. 1) конструктивно выполнен из подвижной и неподвижной частей. Подвижная часть (фиг. 1 и 2) состоит из металлической рамки 1 со сквознь м вырезом, окаймленным выступом 2, для установки подложки 3 с двусторонней передаюгцей антенной, с продольными, вдоль направления движения, параллельными отверстиями в торцовых боковых утолщенных частях, предназначенных для скольжения по направляющим, и тяги 4 с продольным пазом 5 для токоподводящих проводов, для кинематической связи металлической рамки с подвижным объектом и крепления соединительного входного разъема 6 для под- ключения к усилителю. Неподвижная часть (фиг. 1 и 2) состоит из каркаса 7, совмещающего функцию магнитного экрана, включающего жестко закрепленные между собой ниж. нее и верхнее основания 8, боковые стойки 9 и переднюю 10 и заднюю 11 торцовые фигур- ные планки, двух круглых направляющих стержней 12, закрепленных на торцовых фигурных планках каркаса, и двух корпусов 13, вьпю. шенных в виде полого прямоугольного параллелепипеда без верхнего основания, на нижнем внутреннем основании которого крепятся два упора 14 высотой, равной внутренней высоте параллелепипеда, ограничивающие размеры основания приемной антенны 15, с прорезями 16 в боковых гранях вдоль зоны перемещения, с двумя внешними ограничительны.ми планками 17, закрывающими прорези, в которых устанавливаются оси с лево- и правозаходной винтовыми резьбами на разных концах 18, с насаженными на них держателями 19 приемных антенн с соответствующими резьбами и с плоской (рифленной) втулкой 20 по середине оси, которые неподвижно крепятся в фасках передней и задней торцовых фигурных планок каркаса. При этом нижнее и верхнее основания каркаса имеют сквозной, вдоль продольной оси симметрии, паз 21 и симметричную относительно паза внешнюю фаску 22 для доступа к втулкам без разбора первичного преобразователя. Передняя и задняя торцовые фигурные планки с корпусами имеют по цент. ру общие совмещенные отверстия - в пе- редней - для пружины 23, которая одним концом крепится за приемной антенной, а другим - за планку, а в задней - для вы0
0
с
j 5 0 5 д 5 5
ходного разъема 24, контакты которого соединены с концами приемных антенн. При этом втулки располагаются в пазах нижнего и верхнего оснований, толщина которых меньше щирины паза, а диаметр определяется из выражения Л, где Л и Л - расстояния от нижнего основания корпуса приемных антенн до фаски и внешней плоскости основания каркаса соответственно.
Устройство (фиг. 3) содержит генератор 25 возбуждения, усилитель 26 и расположенную в зоне перемещения объекта антенну 27, кинематически связанную с подвижным объектом, приемные антенны 28, измерительный блок 29, блок 30 регистрации и индикации. При этом приемные антенны выполнены в виде контуров клинообразной формы, сужающихся к началу зоны перемещения объекта и расположенных эквидистантно в параллельных плоскостях, между которыми в плоскости симметрии, помещена передающая антенна, выполненная в виде вогнутого шестиугольника, две противоположные стороны которого параллельны, а другие ортогональны проекциям сужающихся частей приемных антенн.
Устройство работает следующим образом
При перемещении подвижного объекта, а вместе с ним передающей антенны (фиг. 3) в каждой из приемных антенн возбуждаются одни и те же по частоте и амплитуде сигналы. На величину амплитуды ЭДС в каждой из приемных антенн влияют лищь две противоположные стороны симметричного относительно продольной оси симметрии (ось ОХ) вогнутого щестиугольника, так как его другие стороны ортогональны сужающимся частям измерительных обмоток (фиг. 3). Индуцируемые сигналы последовательно - согласным включением суммируются, а затем в измерительном блоке 29 преобразуются в потенциальные сигналы, пропорциональные амплитудам частотных сигналов. С целью исключения воздействия внешних полей и помех плоские обмотки экранированы, на входе измерительного блока стоит измерительный фильтр, настроенный на частоту генератора 25, и имеет общую точку заземления. На выходе устройства получают сигнал, характеризующий местоположения подвижного объекта, а с помощью блока 30 производят регистрацию значения местоположения в цифровой и/или ана.юговых формах.
По приращению сигнала можно судить и о направлении перемещения подвижного объекта. При положительном приращении объект перемещается от начала системы отсчета, а при отрицательном - к нача.ту.
В известных устройствах подвижная часть первичного преобразователя перемещается по направляющим и имеет две степени свободы. Поэтому нарущается плоско- параллельность, что и приводит к появлению методической ощибки.
При наличии расположенных по разные стороны от оси симметрии ОХ направляющих стержней 12 (фиг. 1) нарушение плос- копараллельности невозможно.
Очевидно, что целевое назначение первичного преобразователя не нарушается, если неподвижную часть сделать подвижной, а подвижную - неподвижной, или перемешать обеими частями одновременно. Жесткое закрепление направляюш,их стержней и корпусов приемных антенн на каркасе 1 (фиг. 1 и 2) дает возможность создать конструкцию первичного преобразователя, на выходной сигнал которого не оказывают влияние ни осевой поворот, ни поперечные колебания преобразователя, а само движение становится более устойчивым.
Для получения максимального линейного диапазона и ускорения наладки преобразователя использованы оси с лево- и право- заходными винтовыми резьбами с насаженными на них держателями приемных антенн, и с втулкой (с рифленной внешней поверхностью - для исключения проскальзывания), установленной посредине оси, которая входит в пазы верхнего и нижнего оснований каркаса соответственно.
При наладке или регулировке чувствительности пружиной 23 (фиг. 2) исключается чрезмерное натяжение обмотки рамочных контуров и обеспечивается ее цельность, так как свободный конец приемной антенны не закреплен, а изменение конфигурации рамки приводит к растяжению (сжатию) пружины.
После получения заданных выходных характеристик корпуса приемных антенн заливаются твердеюшим материалом - компаундом, например эпоксидным клеем.
Формула изобретения
1.Устройство для контроля местоположения подвижного объекта, содержашее генератор, выход которого через усилитель
соединен с передающей антенной, контур которой выполнен в виде вогнутого шестиугольника, в плоскостях, параллельных пе- редаюшей антенне, расположены контуры приемной антенны, выполненные в виде клиQ ньев, сужающихся к началу зоны перемещения объекта, соединенные последовательно и подключенные к входу измерительного блока, выход которого соединен с блоком регистрации и индикации, отличающееся тем что, с целью повышения точности контроля,
5 подвижная часть передающей антенны выполнена в виде металлической рамки со сквозным вырезом, окаймленным выступом, в котором установлена двусторонняя передающая антенна, боковые утолщенные стоQ роны металлической рамки имеют цилиндрические пазы, в которых размещены направляющие стержни, закрепленные на неподвижном каркасе, к торцовой части металлической рамки прикреплена тяга, на которой установлен разъем, подключенный к контуру
5 передающей антенны, неподвижный каркас снабжен жестко закрепленными верхним и нижним основаниями, на которых установлены упоры контуров приемной антенны, в боковых стенках корпуса приемной антенны выполнены отверстия, в которые вставлены оси, на которых по резьбе установлены держатели контуров приемной антенны, резьба на правой и левой половинах осей имеет противоположное направление.
2.Устройство по п. 1, отличающееся тем, что металлическая рамка, упоры контуров
приемной антенны, оси и держатели выполнены из магнитомягкого материала.
0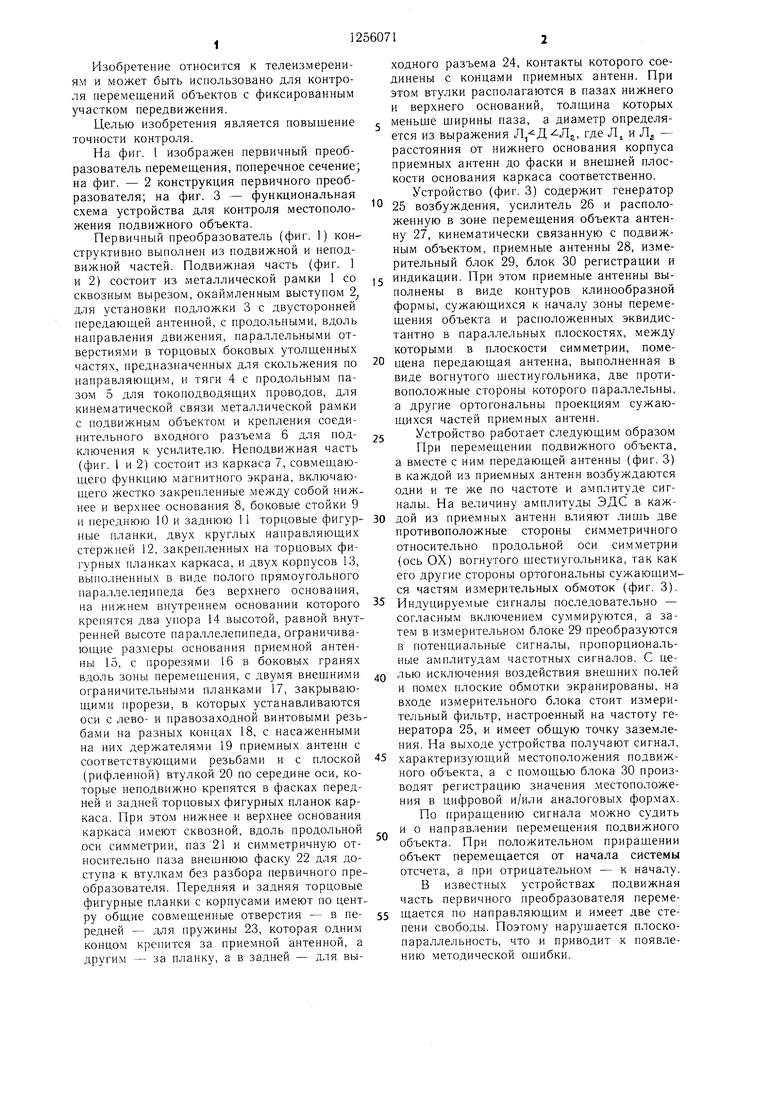
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1275505A2 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1322348A1 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1288737A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1160458A1 |
| Устройство для контроля местоположения подвижного объекта | 1985 |
|
SU1305748A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1239739A1 |
| РАДИОРЕПЕРНАЯ СИСТЕМА ДИАГНОСТИКИ СОСТОЯНИЯ ГОРНОТЕХНИЧЕСКИХ ОБЪЕКТОВ | 1992 |
|
RU2049231C1 |
| Трансформаторный преобразователь угловых перемещений | 1977 |
|
SU667804A1 |
| Способ ультразвукового эхо-импульсного неразрушающего контроля трубопроводов и аппаратура для его осуществления | 2017 |
|
RU2655983C1 |
Изобретение относится к телеизмерениям и может быть использовано для контроля перемещений объектов с фиксированным участком перемещения. Целью изобретения является повышение точности контроля. Точность контроля повышена благодаря конструкции, фиксирующей взаимное расположение передающего и приемных контуров и предотвращающей поперечные боковые перемещения контуров, что обеспечивает зависимость амплитуды измеряемого сигнала только от продольных перемещений контура. Круглые направляющие стержни исключают возможность перекоса и заклинивания подвижной части преобразователя. Кроме того, конструкция обеспечивает постоянство величины воздущного зазора между контурами преобразователя. 1 з.п. ф-лы. 3 ил. to ел а
7 16 19 /J
I
/5
/
/
2
/ 22
18 гг 20 Фиг.
/ /у ////////////у А У
Ff
/ 22
г 20 Фиг.
f8
фиг. г
Jff
Составитель Е. Бакеев
Редактор А. ВоровичТехред И. ВересКорректор Л. Патай
Заказ 4828/51Тираж 515Подписнор
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, , Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Авторское свидетельство СССР № 1226506, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
