3157
Изобретение относится к измерительной технике и может быть использовано для создания образцовых средств измерения массы.
Цель изобретения - повышение точности взвешивания.
На фиг. 1 приведена функциональная схема устройства; на фкг. 2 - временная диаграмма, поясняющая работу устройства.
Цифровое весоизмерительное устройство (фиг.1) содержит чувствительный элемент с датчиком J некомпенсации, компенсирующую катушку 2, два разнополярных генератора 3 и 4 тока, ключ 5, таймер 6, генератор 7, блок 8 индикации, блок 9 обработки сигнала некомпенсации, состоящий из аналого- цифрового преобразователя (АЦП) 10, трех сумматоров 13-13, двух регистров 14 и 15 сдвига, двух регистров 16 и 17 хранения и реверсивного счетчика 18
Вход АЦП 3 0 подключен к выходу датчика 1 некомпенсации чувствительного элемента, а выход - к первым суммирующим входам сумматоров 11, 12 и 13, а также к входу первого регистра 14 сдвига, выход которого соединен непосредственно с двумя вычитающими входами, а через регистр сдвига 15 - с вторым суммирующим входом сумматора 11, третий суммирующий вход которого через регистр 16 хранения связан с собственным выходом и вторым суммирующим входом сумматора 12, выходом подключенного к входу управления таймера 6, тактовый вход которого связан с выходом генератора 7, а выход - с управляющим входом ключа 5, два аналоговых входа которого подсоединены к выходам генераторов 3 и 4 тока, а выход подключен к компенсирующей катушке 2. Третий суммирующий вход сумматора 12 соединен с входом блока 8 индикации и выходом реверсивного счетчика 18, прямой и реверсив- ный входы которого связаны соответственно с выходами переполнения и за- ема сумматора 13, второй суммирующий вход .которого через регистр 17 хранения подключен к его собственному выходу.
Устройство работает следующим образом.
При уравновешенных весах сигнал рассогласования (X) на выходе датчика 1 некомпенсации не содержит постоянной составляющей, а включает в се
0
5
n .
;5,
0
5
0
5
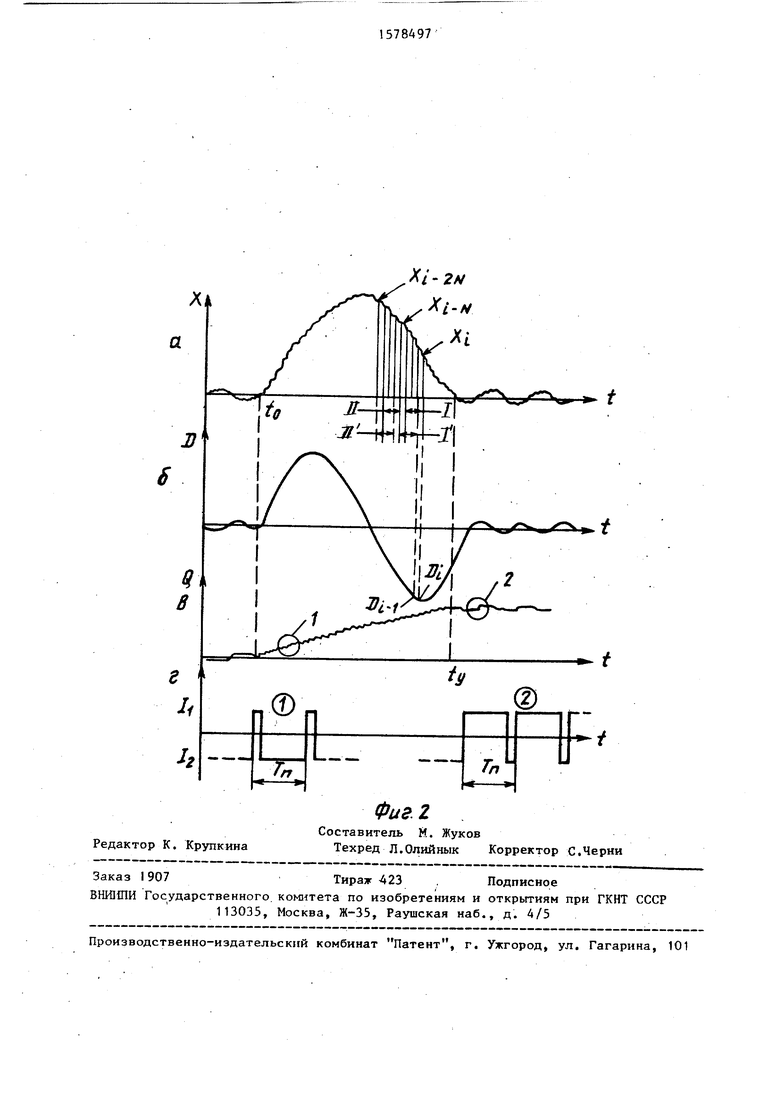
бя только высокочастотные шумы датчика и низкочастотные колебания, обусловленные вибрационными помехами, При нагружении весов измеряемым грузом механическая система весов перемещается и на выходе датчика некомпенсации появляется постоянное смещение сигнала рассогласования (время to - ty на фиг.2). Сигнал рассогласования поступает на блок 9 обработки сигнала некомпенсации, который преобразует аналоговый сигнал некомпенсации в цифровой код с помощью АЦП 10 и вырабатывает два выходных цифровых сигнала. Первый из них - сигнал управления, используемый для Формирования тока в катушке компенсации, обеспечивающего уравновешивание груза, второй - сигнал регистрации, используемый для отображения измеряемого веса блоком 8 индикации. Сигнал управления поступает на вход предварительной установки счета таймера 6, на тактовый вход которого поступают высокочастотные импульсы с выхода генератора 7, с частотой на несколько порядков выше частоты опроса АЦП 10. Таймер 6 коммутирует разнополяр- ные генераторы тока 3 и 4 с помощью ключа 5, Формирующего в компенсирующей катушке 2 двухполярные импульсы тока (I,, Ig на фиг.2г), период которых Тг равен периоду импульсов опроса АЦП 10, а скважность (и, следовательно, величина постоянной составляющей тока компенсации) пропорциональна значению сигнала управления. Мощность (активная), выделяемая в катушке, не зависит от скважности, а определяется только разностью и стабильностью значений тока, которые при различных значениях массы взвешиваемого груза являются постоянными. Таким образом, температура в магнитной системе не зависит от измеряемого веса и тем самым достигается высокая температурная стабильность .
Блок 9 обработки сигнала некомпенсации формирует сигнал управления, равный сумме трех величин: сигнала, пропорционального величине сигнала рассогласования (X) и обеспечивающего электрическую компенсацию измеряемого веса,- сигнала, пропорционального скорости изменения низкочастотных (вибрационных) помех (D), обеспечивающего уменьшение влияния их на
10
раскачку мехнической части вессв (электрическое демпфирование), сигнала, псшучамемого путем накопления усредненной ошибки рассогласования (Q), обеспечивающего минимизацию ста3 тической ошибки управления. Сигнал Q является одновременно сигналом регистрации веса, так как его величина пропорциональна измеряемому весу и при его формировании обеспечивается фильтрация остаточных вибрационных и высокочастотных помех.
Блок 9 обработки сигнала некомпенсации работает следующим образомСигнал рассогласования с выхода датчика 1 некомпенсации в дискретные моменты времени t; преобразуется АЦП 10 в параллельный код Xj . Сигнал, пропорциональный скорости изменения низкочастотных помех в момент времени t
ка 9) в нем учитывается корреляция Функций SI и S1I. Обозначив за Si и SIl значения сумм R момент времени tj.,| , можно записать:
SI SI + X; - XJ-M
(2)
SII SII + - Xj-sw Тогда с учетом (I) и (2) D| D;.+ Xj + ,i -2 Xj-, (3) Вычисление выражения (З) осущест}j может быть определен как 5}.
2M-I
(фиг.2а,б). Dj SI - SII где
м-i
,п, CD
п-.О П-W
SI - сумма N последних
отсчетов , SII - сумма N обсчетов X, предшествующих отсчетам суммы SI.
Использование суммарных значений X обеспечивает подавление высокочастотных шумов, которое увеличивается с увеличением N, однако при этом увеличивается и время усреднения, котовляется в блоке 9 с помощью двух сдви15 говых регистров 14 и 15 с величиной сдвига, равной N, регистра 16 хранения, запоминающего значение сигнала D к предшествующем такте, и сумматора 1 1 .
20 Таким образом, за один такт работы осуществляется формирование сигнала DJ, пропорционального скорости изменения низкочастотных помех.
Формирование сигнала Q , пропорци25 опального весу взвешиваемого груза (Фиг.2в), осуществляется путем суммирования с учетом знака в сумматоре 13 величины X; со значением сигнала на выходе этого же сумматора
30 в предшествующем SIIIj.. В случае переполнения сумматора 13 импульс с выхода переполнения сумматора поступает на прямой вход реверсивного счетчика 18. В случае заема импульс с выхода заема сумматора поступает на
рое должно быть меньше периода низ- реверсивный вход счетчика 18. Величи- кочастотных помех, Реально при часто- на сигнала на выходе сумматора 13 в
каждом такте работы блока 9 определяется знаком и величиной арифметите опроса АЦП 1-10 кГц N 10-30. Для высокоскоростного определения
величины D; (за один такт работы бло- АП ческой суммы слагаемых |SIIIi +X : .
SIII-,
40
SIIIj., Xj при 0Ј5ЫГ,. + Xj Ј А(4)
SIII-j. + Xj-n при SIII; 4 + X, А, Формируется импульс переноса
A+(SIII; 4 + X;) при SIII ;. + Xj 0 формируется импульс заема .
3
15784976
ка 9) в нем учитывается корреляция Функций SI и S1I. Обозначив за Si и SIl значения сумм R момент времени tj.,| , можно записать:
SI SI + X; - XJ-M
(2)
SII SII + - Xj-sw Тогда с учетом (I) и (2) D| D;.+ Xj + ,i -2 Xj-, (3) Вычисление выражения (З) осуществляется в блоке 9 с помощью двух сдвиговых регистров 14 и 15 с величиной сдвига, равной N, регистра 16 хранения, запоминающего значение сигнала D к предшествующем такте, и сумматора 1 1 .
Таким образом, за один такт работы осуществляется формирование сигнала DJ, пропорционального скорости изменения низкочастотных помех.
Формирование сигнала Q , пропорциопального весу взвешиваемого груза (Фиг.2в), осуществляется путем суммирования с учетом знака в сумматоре 13 величины X; со значением сигнала на выходе этого же сумматора
в предшествующем SIIIj.. В случае переполнения сумматора 13 импульс с выхода переполнения сумматора поступает на прямой вход реверсивного счетчика 18. В случае заема импульс с выхода заема сумматора поступает на
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое регистрирующее устройство | 1988 |
|
SU1613863A1 |
| Аналого-цифровой преобразователь | 1979 |
|
SU834892A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 1983 |
|
SU1840292A1 |
| Весы с электромагнитным уравновешиванием | 1982 |
|
SU1046619A1 |
| Адаптивный кодирующий преобразователь стационарных случайных процессов | 1980 |
|
SU960846A1 |
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| Электронные цифровые весы | 1981 |
|
SU991175A1 |
| Адаптивный аналого-цифровой преобразователь | 1984 |
|
SU1226666A1 |
| Цифровой коррелятор | 1983 |
|
SU1129621A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
Изобретение относится к измерительной технике и может быть использовано для создания эталонных и образцовых весов. Цель изобретения - повышение точности взвешивания. Весоизмерительное устройство содержит чувствительный элемент с датчиком некомпенсации 1, компенсирующую катушку 2, подключенную через ключ 5 к двум разнополярным генераторам тока 3 и 4, таймер 6, выход которого подключен к управляющему входу ключа 5, а тактовый вход - к выходу генератора 7, блок индикации 8 и блок обработки сигнала некомпенсации 9, состоящий из аналого-цифрового преобразователя 10, входом связанного с выходом датчика некомпенсации 1, а выходом - с первыми суммирующими входами сумматоров 11, 12 и 13 и с входом регистра сдвига 14. Выход регистра сдвига 14 непосредственно связан с двумя вычитающими, а через регистр сдвига 15 - с вторым суммирующим входом сумматора 11, третий суммирующий вход которого через регистр хранения 16 соединен с собственным выходом и вторым суммирующим входом сумматора 12. Выход сумматора 12 подключен к управляющему входу таймера 6, а третий суммирующий вход связан с входом блока индикации 8 и выходом реверсивного счетчика 18, прямой и реверсивный входы которого подсоединены соответственно к выходам переполнения и заема сумматора 13. Регистр хранения 17 связан выходом с вторым суммирующим входом сумматора 13, а его вход подключен к выходу этого же сумматора. 2 ил.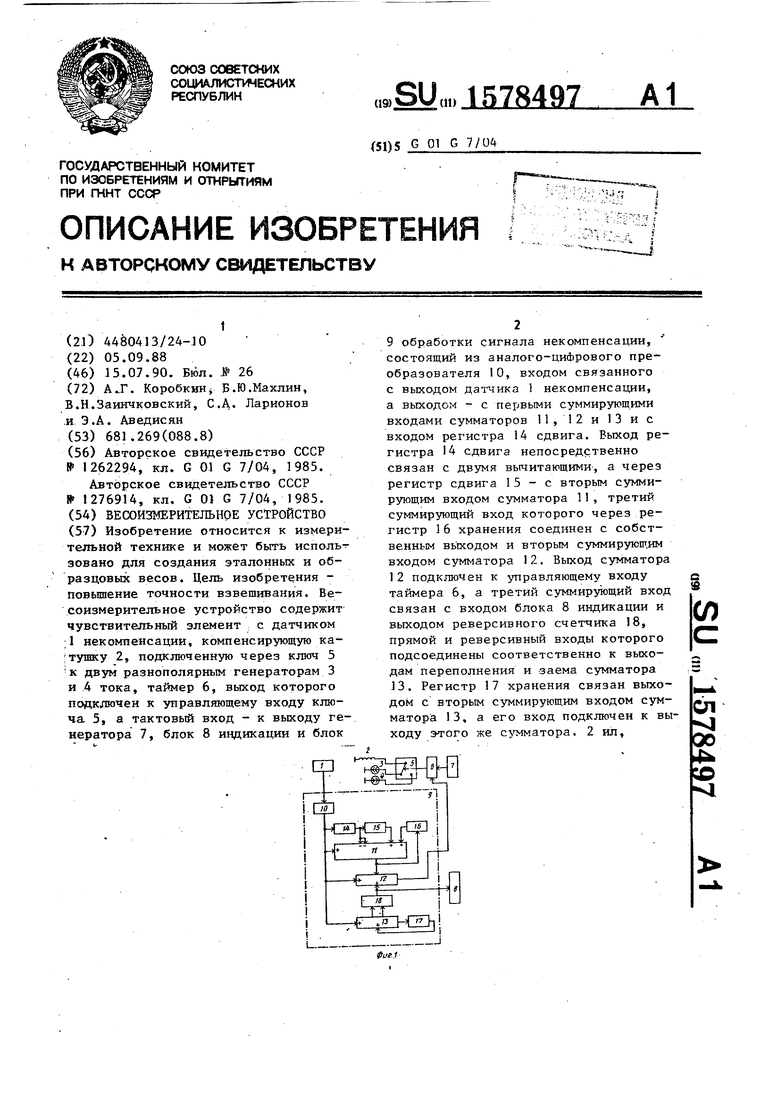
где А - максимальная емкость сумматора.
Сигнал на выходе реверсивного счет- чика 18 определяется как
Q;., при 0Ј SIII-..ч +XJ А QJ QM + 1 при SIIIj4 + Xi A (5)
Q ,,4 - 1 при SIir,- + X; С 0
- - I
Из соотношений (4), (5) видно, что при наличии постоянного сигнала рассогласования одното знака (смещение датчика) происходит монотонное увеличение (уменьшение) сигнала Q, скорость которого возрастает с уве-, личением величины смещения. При частых изменениях знака X, обусловливаемых в первую очередь влиянием шумов, среднее значение содержимого сумматора 13, а соответственно, и величина 0, практически не меняется.
Таким образом, достигается фильтрация низкочастотных и высокочастот- ных помех в сигнале регистрации. Увеличение емкости сумматора 13 (А)увеличивает степень Фильтрации шумов, однако, одновременно, уменьшает быстродействие. В реальных устройствах, при 8-разрядном АЦП емкость сумматора 13 выбирается А 2. Величина Q , используется и при Формировании сигнала управления, обеспечивая исключение статистической ошибки сигнала управления.
Изобретение позволяет повысить точность взвешивания за счет использования ускоренной цифровой обработки сигнала рассогласования, что дает возможность осуществить электронное демпфирование системы компенсации веса с одновременной компенсацией вибрационных помех/ а также за счет введения двухполярного сигнала ком- пенсации с широтно-импульсной модуляцией, что исключает зависимость выделяемой в компенсирующей катушке активной мощности от измеряемого веса. При этом также значительно упро- щается процесс настройки и поддержа- . ния стабильности метрологических па- раметров в процессе эксплуатации за счет исключения из состава устройства аналоговых узлов, требующих со- ответствующей подстройки, и выполнения блока обработки сигнала некомпенсации целиком из цифровых узлов, не нуждающихся ъ подобных операциях.
Формула изобретения
Весоизмерительное устройство, содержащее чувствительный элемент с датчиком некомпенсации, блок индикации и первый генератор тока, подклю
0 5 0
5
0
ченный к одному входу ключа, выход которого связан с компенсационной катушкой силового уравновешивания чувствительного элемента, отличающееся тем, что, с целью повышения точности, в него введены таймер, второй генератор тока с полярностью, противоположной первому, подключенный к другому входу ключа, управляющий вход которого подсоединен к выходу таймера, генератор, выход которого подключен к тактовому входу таймера, три сумматора, два регистра сдвига, два регистра хранения, реверсивный счетчик и аналого- цифровой преобразователь, вход которого подсоединен к выходу датчика некомпенсации чувствительного элемента, а выход - к первым суммирующим входам сумматоров и входу первого регистра сдвига, выход которого связан с двумя вычитающими входами первого сумматора и через второй регистр сдвига - с вторым суммирующим входом первого сумматора, третий суммирующий ь.чод которого через первый регистр хранения подключен к выходу первого сумматора и второму суммирующему входу второго сумматора, выход которого соединен с входом управления таймера, а третий суммирующий вход - с входом блока индикации и выходом реверсивного счетчика, прямой и реверсивный входы которого соединены соответственно с выходами переполнения и заема третьего сумматора, второй суммирующий вход которого через второй регистр хранения связан с собственным выходом.
-/
| Весы с автоматическим уравновешиванием | 1985 |
|
SU1262294A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
