Изобретение относится к электротехнике, а -именно к унравлению механизмами, тро- гание и стонорение которых должны нроиз- водиться нлавно в условиях изменения статической нагрузки в широких пределах. К таким механизмам относятся maxTHii ie подъемные маншны, маятниковые пассажирские канатные дороги, скоростные лифты, некоторые типы подъемных кранов.
Цель изобретения - повышение нлав- ности и точности управления в периоды тро- гания и стопорения машины.
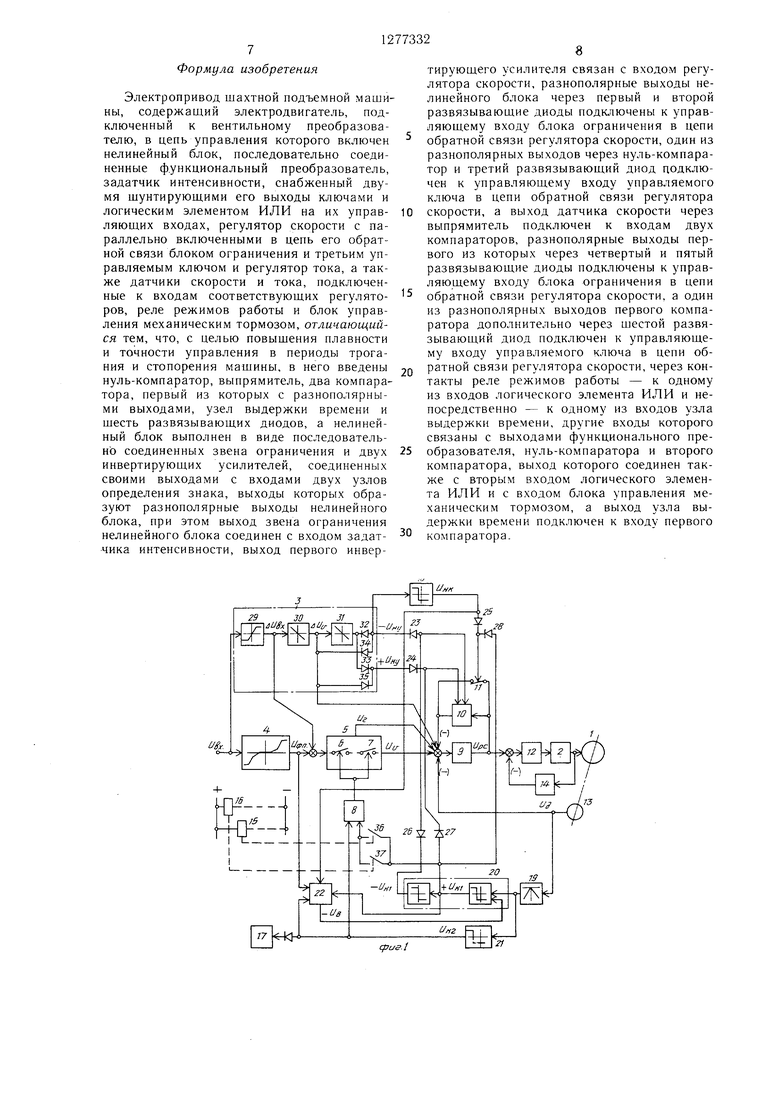
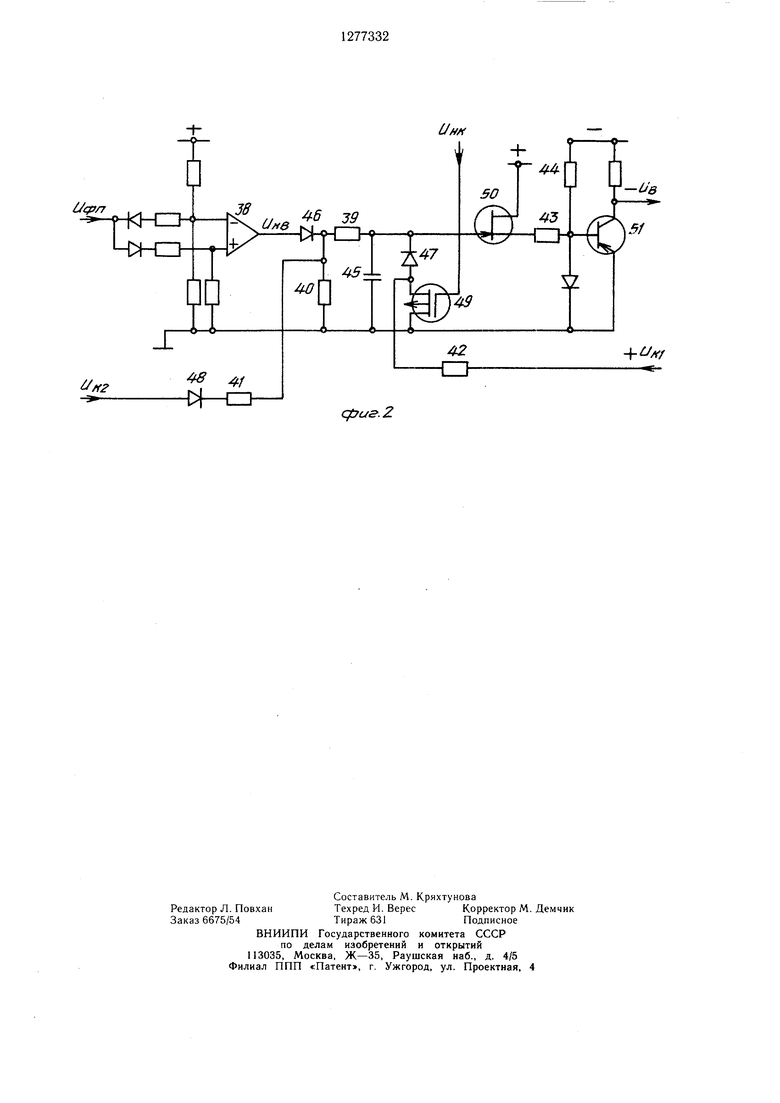
На фиг. 1 приведена функциональпая схема электропривода; на фиг. 2 - принципиальная схема узла выдержки зремепи, вариант.
Электропривод (фиг. I) содержит электродвигатель , подключепный к вегггильному преобразователю 2, в цепь управлепия которого включен нелинейный блок 3, носле- довательно соединенные функциональный преобразователь 4, задатчик 5 иптенсивно- сти, снабженный двумя шунтируюи:,ими его выходы ключами 6 и 7 с логическим элементом ИЛИ 8 на их унравляюших входах, регулятор 9 скорости с параллельпо включенными в цепь его обратной связи блоком 10 ог)аничения и управляемым ключо.м 11, и регулятор 12 тока, а также датчик 13 и 14 скорости и тока, нодключепные к входам соответствующих регуляторов, реле 15 и 16 режимов работы и блок 17 управлепия механическим тормозом. В электропривод введены нуль-комнаратор 18, выпрямитель 19, компараторы 20 и 21, первый из которых с разнополярными выходами, узел 22 выдержки времени и развязывающие диоды 23 28: нелинейный блок 3 выполнен в виде последовательно соед пненных звена 29 ограничения и инвертирующих усилителей 30 и 31, соединенных своими выходами с входами двух узлов определения знака, первый из которых выполнен на диодах 32 и 33, а второй - на диодах 34 и 35. Выходы узлов определения знака образуют разнонолярпые выходы нелинейного блока 3. нри этом выход звена 29 ограничения нелинейно1-о б.тока 3 соединен с входом задатчика 5 интенсивности, выход инвертирующего усилителя 30 связан с входом регулятора 9 скорости. разнополярные выходы нелинейного блока 3 через развязывающие диоды 23 и 24 подключены к унравляющему входу блока 10 ограничения в цени обратной связи регулятора 9 скорости, один из разнонолярных выходов через нуль-комнарато) 18 и развяшя- вающий диод 25 нол,ключен к уг::равля1о- щему входу унравляемого ключа I к цепи обратной связи регулятора 9 скорости, а выход датчика 13 скорости через вынрямите.чь 19 подключен к входам компараторов 20 и 21, разнонолярные выходы первого из которых через развязывающие диоды 26 и 27 подключены к унравляющему входу блока 10 ограничения в цени обратной связи регуля
0
5
0
5
0
5
0
5
тора 9 скорости, а один из выходов ком- наратора 20 через развязывающий диод 28 донолнительно подключен к управляющему входу управляемого ключа 11 в цепи обратной связи регулятора скорости, через контакты 36 и 37 реле 15 и 16 режимов работы -- к одному из входов логического элемента ИЛИ 8 и непосредственно - к одному из входов узла 22 выдержки времени, другие входы которого связаны с выходами функционального преобразователя 4, нуль- компаратора 18 и компаратора 21, выход которого соединен также с вторым входом логического элемента ИЛИ 8 и е входом блока 17 унравления механическим тормозом, а .выход узла 22 выдержки времени подключен к входу комнаратора 20.
Узел 22 выдержки времени (фиг. 2) содержит усилитель 38, резисторы 39-44, конденсатор 45, вентили 46-48, транзисторы 49-51.
Иа чертежах обозначены также сигналы унравления: входной UBX системы, уставки скорости иФм па В1)1ходе функционального преобразователя 4, заданной скорости и„ и зада} ного рывка U|- на выходах задатчика 5 интенсивности, промежуточные и ДЬч. и разнополярные +ину и -Уну на выходах нели} ейного блока 3, выходной регулятора 9 скорости, действительной скорости LJ на выходе датчика 13 скорости, выходной LJim нуль-компаратора 18, разнополярные -|-ljK| и -UK) па выходах компаратора 20, выходной L.IXJ, колшаратора 21, выходной --IJii узла 22 выдержки времени, выходной L Kii усилителя 38.
Полярности сигналов управления пред- с 1авлены на чертежах для с,:1учая подачи i;a входы соот1 етств юпи1х элементов достаточных для их срабатывания входных сигналов.
Предлагаемый электропривод работает следующим образом.
В исходном состоянии манп-1на застопорена механнчески.м тормозом, ключи 6, 7 и 11 замкнуты, а сигналь; управления U«, ALJnx, ли., -fUny, --Uny, L .K и,, и,, U,,c, и.), -и равны нулю. Для приведения машины в движение на вход систе.м)з1 унравления подается сигнал IJn.., зеличина и полярность которого являются функцией неремен ения рукоятки управления из нулевого положения. В результате на вход задатчика 5 интенсивности, ограничивающего скорость, ускорение и рывок и выполненного по одной из известных схем, поступает относительно небольпюй сигнал Ui и может поступать основной Uon при достаточной ве. Н1чине сигнала Un-s поскольку характеристики вход --- выход узла 29 ограничения и функционального преобразова- тапя 4 согласовапы таким образом, что вначале доетигает максимальной величины сигнал , а зате.м появляется сигнал иФь. Под действием сигнала ALb-x устанав
ливаются равные между собой по абсолютной величине сигналы +ину и -Uin и сигнал Ur заданной величины и полярности, а сигнал и„ сохраняется равным нулю, так как ключи 6 и 7 замкнуты и интеграторы задатчика 5 интенсивности погаше ны. Нуль-компаратор 18 имеет высокую чувствительность к сигналу , поэтому даже при относительно небольшой его величине на выходе нуль-компаратора устанавливается положительный сигнал UHK, ко- торый размыкает ключ 11. В результате под действием сигнала Ur сигнал UPC благодаря интегрирующему действию регулятора 9 скорости, возрастает до значения, определяемого сигналом +ичу или , которые используются в выполненном по известной схеме блока 10 ограничения в качестве опорных потенциалов. Так как по отношению к контуру тока сигнал UPC является задаюпдим, то устанавливаются пропорциональные ему ток и момент электро- двигателя 1. Поскольку сигнал Up выбирается из условия компенсации ошибки системы по заданию рывка, то его величина может оказаться недостаточной для получения желаемого темпа возрастания сигнала LJpc и, соответственно, момента не- подвижного двигателя. Поэто.му на вход регулятора 9 скорости дополнительно подается относительно небольшой сигнал Ди, который в период трогания машины арифметически суммируется с сигналом Ur.
Таким образом, при неподвижной ма- шине система управления работает в режиме регулирования момента двигателя. Необходимая величина момента задается сигналом LJnx, а его максимальное значение в этом режиме определяется максимальной величиной сигналов -|-ииу и -UHV и выбирается из ус- ловия предотвращения обратного проворота барабанов при подъеме тяжелого груза. Это позволяет выбрать желаемую величину момента до начала движения машины и тем самым обеспечить ее плавное трогание.
Растормаживание машины механическим тормозом при автоматическом управлении начинается в зависимости от принятой логики его работы либо одновременно с подачей сигнала UDX, либо после срабатывания некоторых блокировок (например, после до- стижения токами якоря и возбуждения электродвигателя 1 заданных значений), а при ручном управлении осуществляется оператором. Фиксирование начала движения является наиболее достоверной информацией, свидетельствующей о полном растор- маживании машины, а значит и ее готовности к дальнейшему наращиванию скорости. Осуцдествляется это компаратором 20, имеющим высокую чувствительность к сигналу действительной скорости Ud, поступаю- щему на его вход через выпрямитель 19. Поэтому сразу же после трогания машины на выходах компаратора 20 устанавлива
5
0 о 5
0
5
0
ются сигналы +IJK| и -UK|, которые через развязываюпдие диоды 26-28 поступают на входы блока 10 ограничения и управляемого ключа 11. Эти сигналы равны между собой по абсолютной величине и выбираются из условия ограничения тока двигателя максимально допускаемой для режима движения величиной.
В результате диоды 23 и 24 запираются, воздействие сигналов +lJiiy и -Уму на работу систе.мы прекращается и она начинает функционировать в режиме регулирования скорости. Сигнал + UK, через замкнутый контакт 36 или 37 реле направления движения и логический элемент ИЛИ 8 размыкает ключи 6 и 7 и задатчик 5 интенсивности вводится в работу. Поэтому сигнал заданной скорости U;. на его выходе, соответственно скорость машины и пропорциональный скорости сигнала U.) начинают возрастать. При скорости порядка 0,5- 0,8 м/с включается компаратор 21 и положительный сигнал UK на его выходе включает блок 17 управления механическим тормозом, который вводит в релейную схему управления команду на поддержание машины в расторможенном состоянии независимо от положения рукоятки управления.
При ручном управлении машиной оператор может задать рукояткой управления сигнал UBX недостаточной величины, и в момент трогания машины под действием статического усилия произойдет ее кратковременный проворот в обратную сторону, который может вызвать включение компаратора 20. В этом случае нецелесообразно возвращать компаратор в исходное (т.е. соответствующее неподвижной машине) состояние в момент реверса сигнала U.), так как факт полного растор.маживания машины уже зафиксирован. С этой целью сигнал -|-UKI подается с выхода компаратора 20 в узел 22 выдержки времени. Так как транзистор 49 заперт положительным сигналом UHK, то конденсатор 45 заряжается сигналом -f через резистор 42 и вентиль 47. По мере возрастания напряжения на конденсаторе возрастает ток транзистора 50 и резистора 43. Когда этот ток превзойдет ток резистора 44, транзистор 51 выключится и на вход компаратора 20 поступит сигнал -UB, удерживающий компаратор во включенном состоянии при Uri 0. В условиях конкретной установки существует вероятность кратковременного включения компаратора 20 сигналом помехи, который имеет относительно высокую частоту. Для исключения фиксирования компаратора 20 во включенном состоянии сигналом -Un постоянная времени заряда конденсатора 45 сигналом -|-U4 принимается не пропускающей сигнал помехи.
При подъеме сосуда, установленного на посадочные балки и чрезмерно груженого, выбранные максимальные значения сигна.. lOB --j-lJiiy i-i I /;. MOiA T оказаться недоста- д.ля создяиня необходимых) д.ля начала движения двигате.чьного момента, а их увеличенне сверх указанных значений нецелесообразно. В этих условиях перевод системы из режима регл .1Ироза1И1Я тока в режим регу: ир0)ания С1 ;()1)ости целесообразно производить, не только по фиксированию начала движения, ио параллельно е выдержкой времени, отсчит1)Шаемой от момента 1юя 5ления сигнала Uqn: достаточной величины и несколько нреиьппаюни й максимальную продол ж нте.пьность расторма- живания маншны. С этой целью сигнал иФ11 подается в узел 22 выдержки времени на вход комнаратора-вынрямителя, выполненного на усилите.ю 38. Ко1 да сигнал 1,ф:; превысит порог срабатыгиншя комиарато- ра-вынрямите;1Я, на ei o Г5ыходе уста1 О ится .ноложителыц 1Й сигнал , который через вентиль 46 и резистор 39 :iaрядит конденсатор 45. В результате на выходке узле 22 с выдержкой времени, онределяемой постоя - ной времени заряда конденсатор; 45. ус та
новится сигнал -- LJu наратор 20.
Дальнейн1ий процесс движения мапиинэ определяется программой нзменен1-;я сигнала LJnx несоответственно, сигна.ла Г;,. Команда на замедление маьнины с последую- Н1ИМ ее стонорением механическим тормозом вводится путем отключении снгна,1а Ui«. В результате обран1аютея в iiy. io сигналы AlJHN, AIJ;,, -f lJiiN,- --lJiib l,b| s сигнал UKM становится отрицате.тьиым и запирает вентиль 46, а сигнал L iiK также становится отрицательным, открывает транзистор 49 н таким образом б. юкирует цепь заряда KOH;ieiicaTO- ра 45 си|-налом +ljK|. Однако конденсатор 45 продолжает оставаться заряжснпым бла- годаря его подпитке положительным сигналом UKV через вентиль 48 и ро.чисторы 41 и 39. П)н этом возможны два варианта сто- порепия.
По первому варианту, например, в )ежк- ме автоматическог о управления подч емные сосуды пеобходимо остановнть но технологическим нричинам в промежуточной точке ствола с заноминаннем заданного направления движения (т.е. при сохранни г;о включенном еостоянии реле 15 и:1и 6), чтобы носле устранения указанных нричин машина могла завершить прерванный цик.л. Так как команда на выполнение этого варианта BISO- дится во время движения манжнь со значительной скоростью и высоких TpefioBainni
к точности остановки НОД ЬСМНЬГХ CCJCyдOB в
заданной точке ство;1а не нрсд ьявляется., то возможно ocyiH,ecTii;ieHHe iipoii.ecca сто- норения при обеснечепни минимальных динамических усилий Б механических узлах подъемной установки. Осун1.ествляется это путем отключения в процессе замедления при определеппой скорости компаратора 21 и, соответственпо, блока 17 .ленкя меха
0
.5
5
0
0
0
5
ннческим тормозом. Ве.::ичина этой скорости (порядка 0,5--0,8 м/с) устанавливается из стопорения .машнны механическим TOi;iAir)30M, обладающим значите.пьной инер- нноп юстыо, в момент достижения подъем- HbiMM сосудами нулевой скорости. В момент отк;почения компарато)а 21 его выходной сигнал UK.J становится отрицательным, вен- гил1 48 запирается и начинается разряд конденсатора 45 через резисторы 39 и 40. По- стоЯ Шая времени разряда онределяет выдержку времени на отключение сигнала -UB. Эта выдержка в|1емени принимается такой, чтоб и сигнал - I..в был отк.тючен уже носле стонорения мап1ины механическим тормозом, т.е. нрн U i 0. Поэтому компаратор 20 от- клкучается уже п ои зас опоренной и Hpoiiccc уме1-ни11ения скорости до нуля про- |-раммируется задатчикэм 5 интенсивности и отрабатывается системой управления в режиме регу, 1ирования скорости. В результате отк, к;чепня компаратора 20 к..:1ючп 6, 7 н 11 замыкаютея и система управления приво- дд-п ся в исходное состояпие.
По liTopoMy ва)иан1 у ман1ину необходимо застопорит г,, например, гфи достиже- liHH нод ьемн1)1ми сосудами крайних ноложе- ний jHi6o но звуковол у сигналу во время выполпения маневровых операций. Команда па CToriopeiH-ie но этому варианту ноету- нает, как правило, во время движения ма- 11ии1з1 с небольнюй cKOf остью (порядка 0,3- 0,4 м/с и менее, т.е. нри отключенных ком- нарач оре 21 и блоке Г ) и подъемные сосуды должны быть останов.лены без запоми- маиня нанравле1Н1я движенн.я с возможно MCHbHSHM OTK. ioHeiH-ieM от п,оложения, в ко- тор ом они находились в MOMCIJT поступле- пня KO viaib ibi. В этом случае отключег1ие сиг- ча.;1а 1)« сопровождае : ся отключением реле 15 или 16. Соответственно, замыкаются ключи 6 и 7, сигнал L скачком обращается I нуль и электродвигатель 1 нереводится в режим электрического торможения. Так как б.чол 17 уже отключен, то одновременно вводится в работу механический тормоз. Компаратор 20 отключается как и по первому ва|:) уже при заетопоренной ма1нине. По второму варианту процесс остановки ма- ;|н-;ны максимально и}Г1 енси(|)ицирован с целые достижения возможно больн1ей точно- с Л стонорения, но вcJЗникaюпu e при этом динамические усилия невелики, так как не- | елика исходная скорость нодт емных сосудов.
Очевидно, для других режимов работы ман1И1Пм может быть BIJ бран одип из рассмот- рсн;-:ых вариантов стонорения, учитывая включение контактов соот зететвую цих реле ме/кду выходом KOMiiafiaTopa 20 и входом .чо- |-ичеекого элемента ЛИ 8 в дополнение к контактам 36 и 37 реле на правления движения. Таким образом, предлагаемая система управ.тения обеснечиваег сочетание н.пав- но1.:ти и точности стопорення машины.
7 Формула изобретения
Электропривод шахтной подъемной машины, содержаш.ий электродвигатель, подключенный к вентильному преобразователю, в цепь управления которого включен нелинейный блок, последовательно соединенные функциональный преобразователь, задатчик интенсивности, снабженный двумя шунтирующими его выходы ключами и
тирующего усилителя связан с входом регулятора скорости, разнополярные выходы нелинейного блока через первый и второй развязывающие диоды подключены к управляющему входу блока ограничения в цепи обратной связи регулятора скорости, один из разнополярных выходов через нуль-комнара- тор и третий развязывающий диод подключен к управляющему входу управляемого ключа в цепи обратной связи регулятора
логическим элементом ИЛИ на их управ- 10 скорости, а выход датчика скорости через
ляющих входах, регулятор скорости с параллельно включенными в цепь его обратной связи блоком ограничения и третьим управляемым ключом и регулятор тока, а также датчики скорости и тока, подключенные к входам соответствующих регуляторов, реле режимов работы и блок управления механическим тормозом, отличающийся тем, что, с целью повышения плавности и точности управления в периоды трога- ния и стопорения машины, в него введены нуль-компаратор, выпрямитель, два компаратора, первый из которых с разнополярны- ми выходами, узел выдержки времени и шесть развязывающих диодов, а нелинейный блок выполнен в виде последовательно соединенных звена ограничения и двух инвертирующих усилителей, соединенных своими выходами с входами двух узлов определения знака, выходы которых образуют разнополярные выходы нелинейного блока, при этом выход звена ограничения нелинейного блока соединен с входом задат- чика интенсивности, выход первого инвер
8
тирующего усилителя связан с входом регулятора скорости, разнополярные выходы нелинейного блока через первый и второй развязывающие диоды подключены к управляющему входу блока ограничения в цепи обратной связи регулятора скорости, один из разнополярных выходов через нуль-комнара- тор и третий развязывающий диод подключен к управляющему входу управляемого ключа в цепи обратной связи регулятора
выпрямитель подключен к входам двух компараторов, разнополярные выходы первого из которых через четвертый и пятый развязывающие диоды подключены к управляющему входу блока ограничения в цепи обратной связи регулятора скорости, а один из разнополярных выходов первого компаратора дополнительно через шестой развязывающий диод подключен к управляющему входу управляемого ключа в цепи обратной связи регулятора скорости, через контакты реле режимов работы - к одному из входов логического элемента ИЛИ и непосредственно - к одному из входов узла выдержки времени, другие входы которого связаны с выходами функционального преобразователя, нуль-компаратора и второго компаратора, выход которого соединен также с вторым входом логического элемента ИЛИ и с входом блока управления механическим тормозом, а выход узла выдержки времени подключен к входу первого компаратора.
cpus.l
21
L/ep/7
Cffus.Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Устройство управления электроприводом рудничной подъемной установки | 1986 |
|
SU1330066A1 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Устройство для управления тормозом шахтной подъемной машины | 1989 |
|
SU1717513A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство для управления подъемной машиной | 1982 |
|
SU1154194A1 |
| Устройство программного управления металлорежущими станками | 1984 |
|
SU1165671A1 |
| Электропривод постоянного тока | 1988 |
|
SU1599962A2 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Электропривод постоянного тока | 1986 |
|
SU1436255A1 |
Изобретение относится к электротехнике и может найти применение в шахтных подъемных машинах, в скоростных лифтах и т. д. Целью изобретения является повышение плавности и точности управления в период трогания и стопорения машины. Данное устройства позволяет обеспечить плавное трогание подъемной машины за счет выбора желаемой величины момента до начала трогания, а также быст- ее стопорение в заданной точке при любом положении подъемных сосудов. 2 ил. to оо 00 ю
| ПРОМЕЖУТОЧНАЯ ОПОРА ДЛЯ КАНАТНОГО ТРАНСПОРТЕРА | 1923 |
|
SU630A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| М.: Ин- формэлектро, 1976 | |||
| Гальперин И | |||
| Я., Бежон В | |||
| Р | |||
| Модернизация электропривода и автоматизация шахтных подъемных установок | |||
| М.: Недра, 1984, с; 126-128. | |||
