Изобретение относится к подъемным установкам, а именно к системам автоматического управления электроприводом постоянного тока шахтных подъемных машин, и может быть использовано в системах автоматизации рудничных подъемных установок. Цель изобретения - повышение точности регулирования и безопасности эксплуатации подъемной установки.
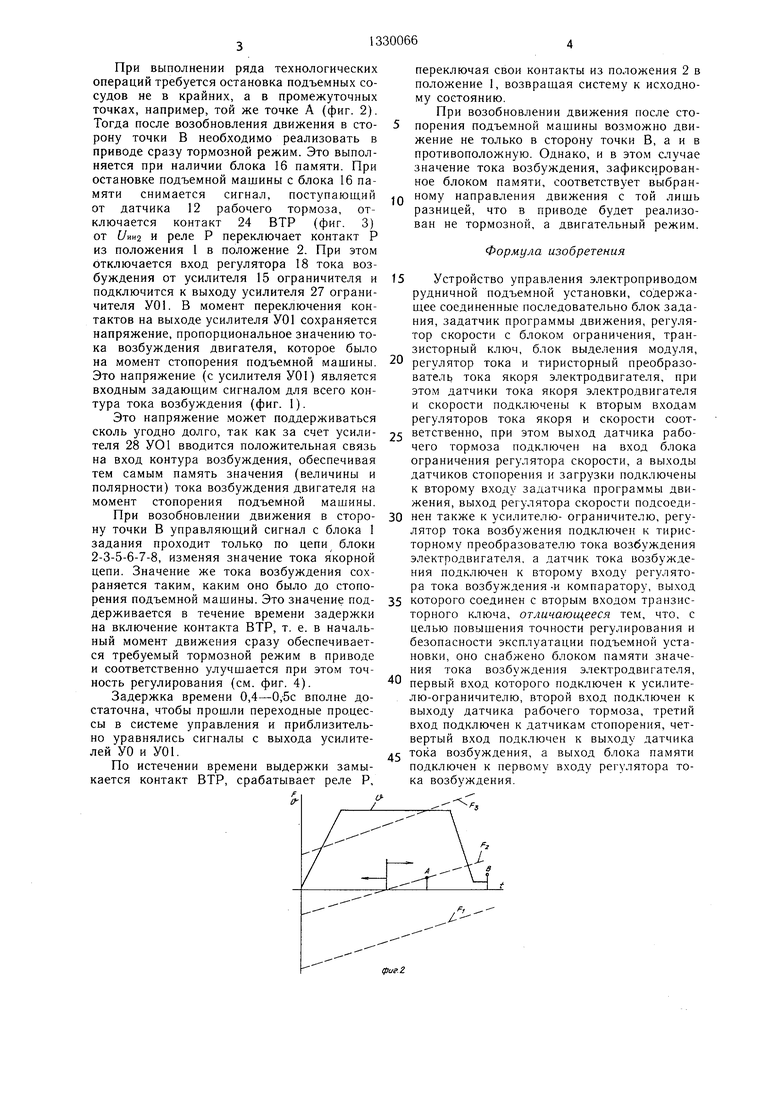
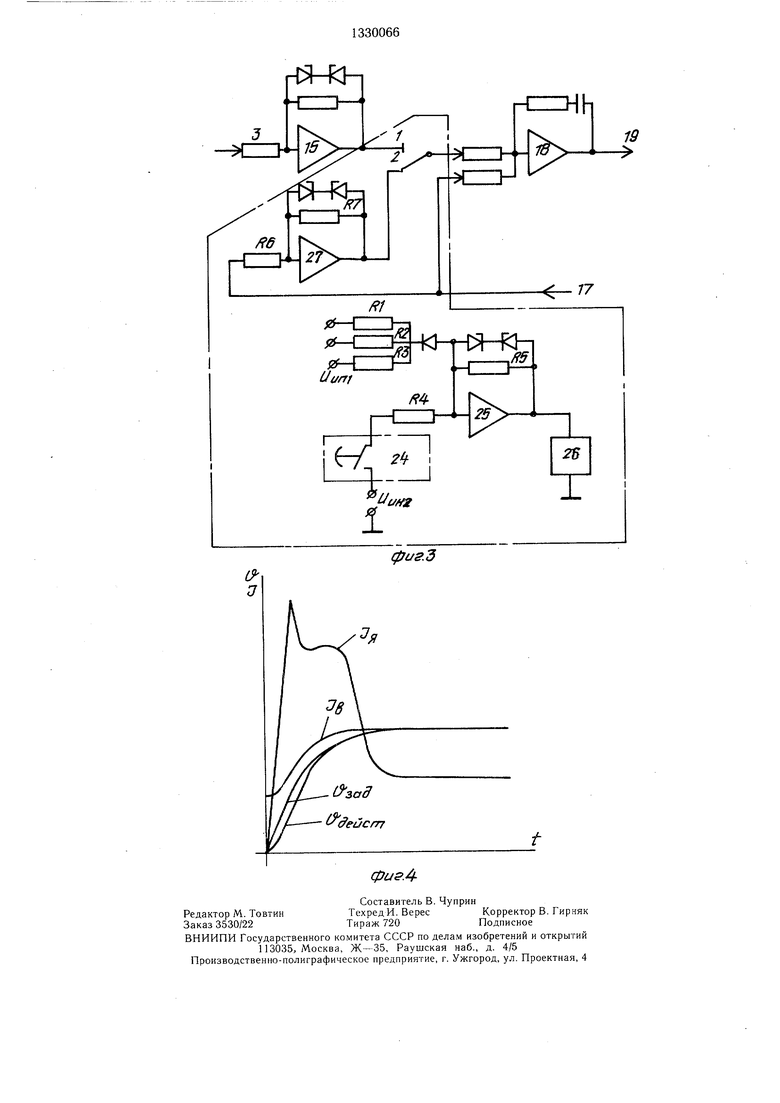
На фиг. 1 изображена блок-схема устройства для управления электроприводом рудничной подъемной установки; на фиг. 2 - диаграммы скорости V и статических усилий F подъемной установки; на фиг. 3 - принципиальная электрическая схема блока памяти (обведен пунктирной линией) и его подключение к системе управления электроприводом; на фиг. 4 - осциллограмма изменения параметров электропривода подъемной установки в режиме спуска груза при включении блока памяти.
Устройство управления электроприводом рудничной подъемной установки состоит из последовательно соединенных блоков 1 задания, задатчика 2 пр ограммы движения, регулятора 3 скорости с блоком 4 ограничения, транзисторного ключа 5, блока 6 выделения модуля, регулятора 7 тока и тиристорного преобразователя 8 тока якоря двигателя, электродвигателя 9. Датчики 10 тока якоря и скорости 11 подключены к входам регуляторов соответственно тока якоря 7 и скорости 3, при этом выход датчика 12 рабочего тормоза подключены на входы блока 4 ограничения регулятора 3 скорости, выходы датчиков стопорения 13 и загрузки 14 подключены на второй вход задатчика 2 программы движения. Выход регулятора 3 скорости соединен также с усилителем-ограничителем 15, выход которого соединен с первым входом блока 16 памяти. Второй, третий и четвертый входы блока памяти соединены соответственно с датчиком 12 рабочего тормоза, с датчиками 13 стопорения, с датчиком 17 тока возбуждения, а выход блока соединен последовательно с регулятором 18 тока возбуждения, преобразователем 19 тока возбуждения двигателя и обмоткой 20 возбуждения. Датчик 17 тока возбуждения подключен к входу регулятора 18 тока возбуждения и одновременно к компаратору 21, выход которого соединен с входом транзисторного ключа 5. Устройство также содержит подъемную машину 22 и подъемные сосуды 23.1 и 23.2.
Устройство работает следующим образом. В начальной точке движения (один подъемный сосуд находится в крайнем верхнем положении, другой в крайнем нижнем) значение и направление действия статического усилия на подъемной машине и двигателе однозначно определяется по сигналу с датчиком стопорения. При этом сами датчики могут не измерять величину этого усилия, а лишь по признаку местоположения
сосуда определять направление его действия. Процесс же движения из начальной точки может рассматриваться только в одном направлении (верхний сосуд 23.1 опускается,
нижний 23.2 поднимается) с реализацией в приводе только двигательного режима. При подаче команды на движение подъемной машины с блока задания 1 поступает сигнал управления на задатчик 2, а от него на регулятор 3 скорости. Одновременно с этим поступает сигнал с датчика 12 рабочего тормоза, который воздействует на контакт 24 ВТР (см. фиг. 3 принципиальной схемы блока памяти и его подключений). Срабатывание (включение) ВТР
5 осуш,ествляется с выдержкой времени, которая соответствует времени выхода сосуда из зоны действия датчика стопорения. В замкнутом состоянии ВТР сигнал с источника напряжения Umr проходит на вход усилителя 25 ограничителя У02, выходное напря0 жение которого приводит к переключению контактов реле Р 26 из положения 2 в положение 1. При этом осуш,ествляется непосредственное подключение усилителя-ограничителя 15 к входу регулятора 18 возбуж5 дения (см. фиг. 1, 3).
В начальный момент движения наряду с действием на блок памяти сигнала с датчика тормоза воздействуют сигналы и с датчиков 13.1 и 13.2 стопорения (фиг. 1, 4). При 0 этом, если в зоне действия датчика находится подъемный сосуд (например, 13.1), то на выходе датчика стопорения напряжение равно О, а если за зоной действия (например, 13, 2), то напряжение равно -f 10В, уровень напряжения источника UHH устанав- 5 ливается равным - 15 В. Входное напряжение на усилитель У02 (приводящее к срабатыванию реле Р) проходит в том случае, когда напряжение на одном из датчиков отсутствует, что соответствует крайнему положению подъемных сосудов.
В процессе движения подъемный сосуд выходит из зоны действия датчика стопорения и действие сигнала с этого датчика снимается с блока памяти. Однако, до момента исчезновения этого сигнала действие - его блокируется другим сигналом - с дат- чика 12 рабочего тормоза, сохраняя при этом посредством блока 16 памяти связь между усилителем-ограничителем 15 (фиг. 1) и вы- хо.цом регулятора 18 возбуждения.
При движении подъемных сосудов изме- 0 няется знак статического усилия и система управления приводом без изменения структуры реализует тормозной режим (например, фиг. 2 точка А).
Таким образом, при движении сосудов из крайних точек никаких особенностей в систе- 5 ме управления нет и блок 16 памяти имеет одно и то же состояние - обеспечивает непосредственное подключение блоков 15 и 18.
0
При выполнении ряда технологических операций требуется остановка подъемных сосудов не в крайних, а в промежуточных точках, например, той же точке А (фиг. 2). Тогда после возобновления движения в сто- рону точки В необходимо реализовать в приводе сразу тормозной режим. Это выполняется при наличии блока 16 памяти. При остановке подъемной машины с блока 16 памяти снимается сигнал, поступающий от датчика 12 рабочего тормоза, отключается контакт 24 ВТР (фиг. 3) от (Уин2 и реле Р переключает контакт Р из положения 1 в положение 2. При этом отключается вход регулятора 18 тока возбуждения от усилителя 15 ограничителя и подключится к выходу усилителя 27 ограничителя У01. В момент переключения контактов на выходе усилителя У01 сохраняется напряжение, пропорциональное значению тока возбуждения двигателя, которое было на момент стопорения подъемной машины. Это напряжение (с усилителя У01) является входным задающим сигналом для всего контура тока возбуждения (фиг. I).
Это напряжение может поддерживаться сколь угодно долго, так как за счет усили- теля 28 УО1 вводится положительная связь на вход контура возбуждения, обеспечивая тем самым память значения (величины и полярности) тока возбуждения двигателя на момент стопорения подъемной машины.
При возобновлении движения в сторо- ну точки В управляющий сигнал с блока 1 задания проходит только по цепи блоки 2-3-5-6-7-8, изменяя значение тока якорной цепи. Значение же тока возбуждения сохраняется таким, каким оно было до стопорения подъемной машины. Это значение под- держивается в течение времени задержки на включение контакта ВТР, т. е. в начальный момент движения сразу обеспечивается требуемый тормозной режим в приводе и соответственно улучшается при этом точность регулирования (см. фиг. 4).
Задержка времени 0,4-0,-5с вполне достаточна, чтобы прошли переходные продес- сы в системе управления и приблизительно уравнялись сигналы с выхода усилителей УО и У01.
По истечении времени выдержки замыкается контакт ВТР, срабатывает реле Р,
5 , 15 0
5
0 5
5
переключая свои контакты из положения 2 в положение 1, возвращая систему к исходному состоянию.
При возобновлении движения после стопорения подъемной мащины возможно движение не только в сторону точки В, а и в противоположную. Однако, и в этом случае значение тока возбуждения, зафиксированное блоком памяти, соответствует выбранному направления движения с той лишь разницей, что в приводе будет реализован не тормозной, а двигательный режим.
Формула изобретения
Устройство управления электроприводом рудничной подъемной установки, содержащее соединенные последовательно блок задания, задатчик программы движения, регулятор скорости с блоком ограничения, транзисторный ключ, блок выделения модуля, регулятор тока и тиристорный преобразователь тока якоря электродвигателя, при этом датчики тока якоря электродвигателя и скорости подключены к вторым входам регуляторов тока якоря и скорости соответственно, при этом выход датчика рабочего тормоза подключен на вход блока ограничения регулятора скорости, а выходы датчиков стопорения и загрузки подключены к второму входу задатчика программы движения, выход регулятора скорости подсоединен также к усилителю- ограничителю, регулятор тока возбужения подключен к тирис- торному преобразователю тока возбуждения электродвигателя, а датчик тока возбуждения подключен к второму входу регулятора тока возбуждения-и компаратору, выход которого соединен с вторым входом транзисторного ключа, отличающееся тем, что, с целью повыщения точности регулирования и безопасности эксплуатации подъемной установки, оно снабжено блоком памяти значения тока возбуждения электродвигателя, первый вход которого подключен к усилителю-ограничителю, второй вход подключен к выходу датчика рабочего тормоза, третий вход подключен к датчикам стопорения, четвертый вход подключен к выходу датчика тока возбуждения, а выход блока памяти подключен к первому входу регулятора тока возбуждения.
(fuf.Z
ZXi/e.4
Составитель В. Чуприн
ТехредИ. ВересКорректор В. Гирняк
Тираж 720Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Редактор М. Товтин Заказ 3530/22
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом шахтной подъемной машины | 1985 |
|
SU1306871A2 |
| Система автоматического управления шахтной подъемной машиной с асинхронным электроприводом | 1979 |
|
SU893778A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Реверсивный электропривод | 1988 |
|
SU1667213A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Устройство для управления электроприводом постоянного тока | 1974 |
|
SU556546A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАБЕГАНИЯ ГРУЖЕНЫХ ПОДЪЕМНЫХ СОСУДОВ НА ТЯГОВЫЕ КАНАТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЗАЩИТА Н.Г.ОГНЕВА) | 1994 |
|
RU2104243C1 |
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Электропривод постоянного тока | 1978 |
|
SU942228A1 |
Изобретение относится к горной пром-ти и позволяет повысить точность регулирования и безопасности эксплуатации подъемной установки. Для этого устройство снабжено блоком 16 памяти значения тока возбуждения электродвигателя 9. Первый вход блока 16 подключен к усилителю-ограничителю 15, второй - к выходу датчика 12 рабочего тормоза, третий - к датчикам 13 стопорения, а четвертый - к выходу датчика 17 тока возбуждения. Выход блока 16 соединен последовательно с регулятором 18 тока возбуждения, преобразователем 19 тока возбуждения и обмоткой 20 возбуждения. Устройство содержит также последовательно соединенные блок 1 задания, задатчик 2 программы движения, регулятор 3 скорости с блоком 4 ограничения, транзисторный ключ 5, блок 6 выделения модуля, регулятор 7 тока и тиристорный преобразователь 8 тока якоря двигателя. К входам регуляторов 7 и 3 соответственно подключены датчики тока якоря 10 и скорости 11. Выход датчика 12 подключен на вход блока 4, а выходы датчиков стопорения 13 и загрузки 14 подключены на второй вход задатчика 2. Блок 16 и его связи позволяют мгновенно реализовать в приводе тормозной режим для остановки подъемных сосудов 23 в промежуточных точках. 4 ил. (Л U-U: СО СО 05 О5
| Устройство для управления электроприводом шахтной подъемной машины | 1980 |
|
SU887403A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Католиков В | |||
| Е | |||
| и др | |||
| Тиристорный электропривод рудничного подъема | |||
| Ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
